1.本发明涉及空压机技术领域,尤其涉及一种多机头空压机控制器的控制方法。
背景技术:
2.当前的空压机设备以单机头、双机头为主,很少有6机头、8机头或更多机头的设备。各个机头逐个启动,启动顺序比较随机;导致各个机头工作总时长相差较大,影响整个空压机设备的使用寿命。
3.本发明采用自动控制算法与排序算法,智能识别出此次应该启动的机头和机头个数。保证充气的稳定,保证各个机头使用的时长相差不大,从而延长整台设备的使用寿命。
技术实现要素:
4.鉴于现有技术中的上述缺陷或不足,期望提供一种多机头空压机控制器的控制方法。
5.本发明提供的一种多机头空压机控制器的控制方法,包括自动控制算法及排序算法相结合,来控制机头的启停;所述自动控制算法为pid算法,通过检测气罐内的气压与设定目标气压值的偏差;所述排序算法为检测各个机头的运行时间,并对运行时间按照由长到短进行排序,在下次启动空压机时,优先启动运行时间短的,从而缩小各个机头之间的运行时间的偏差,延长整体空压机的使用寿命。
6.优选的,所述pid算法为增量式pid算法,只需要测量当前压力值并计算出与上一次压力值的偏差,通过所述增量式pid算法可以精准的控制机头的启动个数,从而使空压机迅速响应,提高充气速度。
7.优选的,所述排序算法为冒泡排序算法,通过逐个数据比大小的方式,将空压机头的运行时间由长到短进行排列,保证下次启动空压机时运行的都是使用时长最短的机头。
8.相对于现有技术而言,本发明的有益效果是:
9.本发明的多机头空压机控制器的控制方法,通过采用的增量式pid算法,计算出当前气压如果要达到目标值,需要启动的机头个数,且通过逐个数据比大小的方式,将空压机头的运行时间由大到小排列,保证下次启动空压机时运行的都是使用时长最短的机头,从而使空压机迅速响应,提高充气速度;智能识别出此次应该启动的机头和机头个数,保证充气的稳定,保证各个机头使用的时长相差不大,从而延长整台设备的使用寿命。
10.应当理解,发明内容部分中所描述的内容并非旨在限定本发明的实施例的关键或重要特征,亦非用于限制本发明的范围。本发明的其它特征将通过以下的描述变得容易理解。
附图说明
11.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
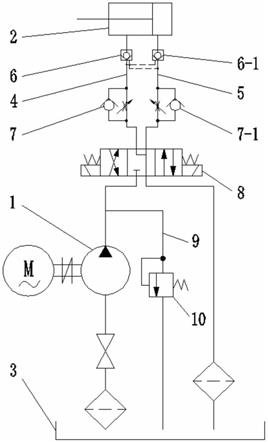
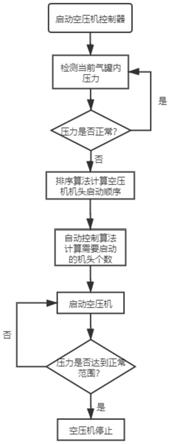
12.图1为本发明实施例提供的一种多机头空压机控制器的控制方法的流程示意图;
13.图2为pid算法公式;
14.图3为增量式pid算法公式。
具体实施方式
15.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
16.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
17.请参考图1~图3,本发明的实施例提供了一种多机头空压机控制器的控制方法,包括自动控制算法及排序算法相结合,来控制机头的启停;自动控制算法为pid算法,通过检测气罐内的气压与设定目标气压值的偏差;排序算法为检测各个机头的运行时间,并对运行时间按照由长到短进行排序,在下次启动空压机时,优先启动运行时间短的,从而保证各个机头的运行时间偏差不大,延长整体空压机的使用寿命。其中,自动控制算法,不限于pid算法,也可以是模糊控制算法;另外,pid算法,不限于pid算法,也可以是pi算法或pd算法。不局限于增量式pid算法,也可以是位置式pid算法。
18.pid算法包含3个参数:p(比例)、i(积分)及d(微分),通过调节之间的参数,来使系统达到快速响应的目的;p为比例增益,是系统进行比例输出;i是积分控制,用于消除空压机控制器的稳定误差;d是微分控制,用于提高系统的响应速度。
19.请参考图3,其中,e[n]为此次的偏差值;e[n
‑
1]为上次的偏差值;e[n
‑
2]为上上次的偏差值;
△
u[n]为当前实测值。
[0020]
在一优选实施例中,pid算法为增量式pid算法,只需要测量当前压力值并计算出与上一次压力值的偏差,通过增量式pid算法可以精准的控制机头的启动个数,从而使空压机迅速响应,提高充气速度。
[0021]
在一优选实施例中,排序算法为冒泡排序算法,但不局限于冒泡排序算法,通过逐个数据比大小的方式,将空压机头的运行时间由长到短进行排列,保证下次启动空压机时运行的都是使用时长最短的机头。
[0022]
在本说明书的描述中,术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
[0023]
在本说明书的描述中,术语“一个实施例”、“一些实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本申请的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0024]
以上仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
技术特征:
1.一种多机头空压机控制器的控制方法,其特征在于,包括自动控制算法及排序算法相结合,来控制机头的启停;所述自动控制算法为pid算法,通过检测气罐内的气压与设定目标气压值的偏差;所述排序算法为检测各个机头的运行时间,并对运行时间按照由长到短进行排序,在下次启动空压机时,优先启动运行时间短的,从而缩小各个机头之间的运行时间的偏差,延长整体空压机的使用寿命。2.根据权利要求1所述的多机头空压机控制器的控制方法,其特征在于,所述pid算法为增量式pid算法,只需要测量当前压力值并计算出与上一次压力值的偏差,通过所述增量式pid算法可以精准的控制机头的启动个数,从而使空压机迅速响应,提高充气速度。3.根据权利要求2所述的多机头空压机控制器的控制方法,其特征在于,所述排序算法为冒泡排序算法,通过逐个数据比大小的方式,将空压机头的运行时间由长到短进行排列,保证下次启动空压机时运行的都是使用时长最短的机头。
技术总结
本发明公开了一种多机头空压机控制器的控制方法,包括自动控制算法及排序算法相结合,来控制机头的启停;自动控制算法为PID算法,通过检测气罐内的气压与设定目标气压值的偏差;排序算法为检测各个机头的运行时间,并对运行时间按照由长到短进行排序,在下次启动空压机时,优先启动运行时间短的,从而保证各个机头的运行时间偏差不大,延长整体的使用寿命。本发明的多机头空压机控制器的控制方法,采用自动控制算法与排序算法,智能识别出此次应该启动的机头和机头个数;保证充气的稳定,保证各个机头使用的时长相差不大,从而延长整台设备的使用寿命。台设备的使用寿命。台设备的使用寿命。
技术研发人员:耿名见 陈瑞青 朱鹏 袁广升
受保护的技术使用者:天津森普捷电子有限公司
技术研发日:2021.08.10
技术公布日:2021/9/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。