1.本实用新型涉及足球机器人技术领域,尤其涉及一种足球机器人用击球装置。
背景技术:
2.随着机器人技术的飞速发展,机器人也越来越广泛的进入到人们的生活当中。足球机器人比赛就是近年来国际上迅速开展起来的一项高科技对抗活动,它涉及人工智能、智能控制、通信、传感、机电一体化等多个领域,集高科技与娱乐于一体,极具观赏性。目前,足球机器人已引入中小学教学与竞赛活动。但现有足球机器人击球装置传动复杂、成本高及装配复杂的特点。
技术实现要素:
3.本实用新型的目的在于提供一种足球机器人用击球装置,旨在解决现有足球机器人击球装置传动复杂成本高的问题。
4.为实现上述目的,本实用新型提供了一种足球机器人用击球装置,包括底座、蓄电箱、电路板、控球组件和击球组件,所述蓄电箱与所述底座固定连接,且位于所述底座一侧,所述电路板与所述底座固定连接,且位于所述蓄电箱一侧,所述控球组件包括两个控球板、两个支架、气泵和气管,两个所述支架与所述底座固定连接,且位于所述底座远离所述蓄电箱一侧,两个所述控球板与两个所述支架固定连接,且分别位于两个所述支架远离所述底座一侧,所述气泵与所述底座固定连接,且位于所述支架一侧,所述气管与所述气泵拆卸连接,并与所述控球板拆卸连接,且位于所述气泵和所述控球板之间,所述控球板具有多个吸气孔,多个所述吸气孔位于两个所述控球板之间,所述击球组件包括固定架、推杆、套筒、电磁铁、弹簧、挡环和限位块,所述固定架与所述底座固定连接,且位于所述电路板一侧,所述推杆与所述固定架滑动连接,并穿过所述固定架,且平行于所述底座,所述套筒与所述推杆固定连接,且位于所述固定架内,所述电磁铁与所述固定架固定连接,并与所述电路板电连接,且位于所述固定架内,所述挡环与所述推杆滑动连接,且位于所述固定架靠近所述蓄电箱一侧,所述限位块与所述推杆固定连接,且位于所述推杆靠近所述挡环一侧,所述弹簧与所述固定架固定连接,并与所述挡环固定连接,且位于所述固定架和所述挡环之间。
5.其中,所述击球组件还包括推板,所述推板与所述推杆拆卸连接,且位于两个所述控球板之间。
6.其中,所述击球组件还包括连接头,所述连接头与所述推杆固定连接,并与所述推板拆卸连接,且位于所述推板和所述推杆之间。
7.其中,所述击球组件还包括缓冲垫,所述缓冲垫与所述套筒固定连接,且位于所述套筒靠近所述电磁铁一侧。
8.其中,所述控球组件还包括超声波传感器,所述超声波传感器与所述气泵固定连接,并与所述电路板电连接,且位于所述气泵一侧。
9.其中,所述底座包括滑轮,所述滑轮与所述底座固定连接,且位于所述底座远离所
述固定架一侧。
10.本实用新型的一种足球机器人用击球装置,通过所述底座上的所述气泵工作使得所述气管吸气,从而所述控球板上的多个所述吸气孔产生吸力,将球吸附在所述控球板上实现控球。所述套筒为磁性材质制成,通过所述电路板控制所述蓄电箱,所述蓄电箱给所述电磁铁通电产生磁性,所述电磁铁将所述套筒吸引移动,所述挡环同所述套筒一同移动,所述挡环将所述弹簧压缩,从而使所述推杆移动实现击球目的。所述电路板控制所述蓄电箱断电,使所述电磁铁失去磁性,由于所述电磁铁不在吸引所述套筒。所述弹簧无外力的作用恢复形变,所述弹簧推动所述挡环移动,从而推动所述限位块移动带动所述推杆移动,实现所述推杆的复位,重复上述步骤实现机器人击球与控球。所述固定架对所述击球组件提供支撑和固定,所述支架对所述控球板提供支撑。所述击球组件,所述本实用新型结构简单、成本低廉适合推广。解决现有足球机器人击球装置传动复杂成本高的问题。
附图说明
11.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
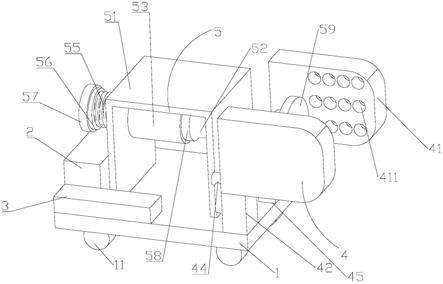
12.图1是本实用新型一种足球机器人用击球装置的结构示意图;
13.图2是本实用新型一种足球机器人用击球装置的侧视图;
14.图3是本实用新型一种足球机器人用击球装置的俯视图。
15.图中:1
‑
底座、2
‑
蓄电箱、3
‑
电路板、4
‑
控球组件、5
‑
击球组件、11
‑
滑轮、41
‑
控球板、42
‑
支架、43
‑
气泵、44
‑
气管、45
‑
超声波传感器、51
‑
固定架、52
‑
推杆、53
‑
套筒、54
‑
电磁铁、55
‑
弹簧、56
‑
挡环、57
‑
限位块、58
‑
缓冲垫、59
‑
推板、591
‑
连接头、411
‑
吸气孔。
具体实施方式
16.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
17.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
18.请参阅图1
‑
图3,本实用新型提供一种足球机器人用击球装置:包括底座1、蓄电箱2、电路板3、控球组件4和击球组件5,所述蓄电箱2与所述底座1固定连接,且位于所述底座1一侧,所述电路板3与所述底座1固定连接,且位于所述蓄电箱2一侧,所述控球组件4包括两个控球板41、两个支架42、气泵43和气管44,两个所述支架42与所述底座1固定连接,且位于
所述底座1远离所述蓄电箱2一侧,两个所述控球板41与两个所述支架42固定连接,且分别位于两个所述支架42远离所述底座1一侧,所述气泵43与所述底座1固定连接,且位于所述支架42一侧,所述气管44与所述气泵43拆卸连接,并与所述控球板41拆卸连接,且位于所述气泵43和所述控球板41之间,所述控球板41具有多个吸气孔411,多个所述吸气孔411位于两个所述控球板41之间,所述击球组件5包括固定架51、推杆52、套筒53、电磁铁54、弹簧55、挡环56和限位块57,所述固定架51与所述底座1固定连接,且位于所述电路板3一侧,所述推杆52与所述固定架51滑动连接,并穿过所述固定架51,且平行于所述底座1,所述套筒53与所述推杆52固定连接,且位于所述固定架51内,所述电磁铁54与所述固定架51固定连接,并与所述电路板3电连接,且位于所述固定架51内,所述挡环56与所述推杆52滑动连接,且位于所述固定架51靠近所述蓄电箱2一侧,所述限位块57与所述推杆52固定连接,且位于所述推杆52靠近所述挡环56一侧,所述弹簧55与所述固定架51固定连接,并与所述挡环56固定连接,且位于所述固定架51和所述挡环56之间。
19.在本实施方式中,通过所述底座1上的所述气泵43工作使得所述气管44吸气,从而所述控球板41上的多个所述吸气孔411产生吸力,将球吸附在所述控球板41上实现控球。所述套筒53为磁性材质制成,通过所述电路板3控制所述蓄电箱2,所述蓄电箱2给所述电磁铁54通电产生磁性,所述电磁铁54将所述套筒53吸引移动,所述挡环56同所述套筒53一同移动,所述挡环56将所述弹簧55压缩,从而使所述推杆52移动实现击球目的。所述电路板3控制所述蓄电箱2断电,使所述电磁铁54失去磁性,由于所述电磁铁54不在吸引所述套筒53。所述弹簧55无外力的作用恢复形变,所述弹簧55推动所述挡环56移动,从而推动所述限位块57移动带动所述推杆52移动,实现所述推杆52的复位,重复上述步骤实现机器人击球与控球。所述固定架51对所述击球组件5提供支撑和固定,所述支架42对所述控球板41提供支撑。所述击球组件5,所述本实用新型结构简单、成本低廉适合推广。解决现有足球机器人击球装置传动复杂、成本高及装配复杂的问题。
20.进一步的,所述击球组件5还包括推板59,所述推板59与所述推杆52拆卸连接,且位于两个所述控球板41之间。
21.在本实施方式中,通过所述推板59增加所述推杆52与球面接触的面积,增强了击球的效果。
22.进一步的,所述击球组件5还包括连接头591,所述连接头591与所述推杆52固定连接,并与所述推板59拆卸连接,且位于所述推板59和所述推杆52之间。
23.在本实施方式中,所述推板59使用时间久后会粘上灰尘,所述连接头591便于更换所述推板59进行清理。
24.进一步的,所述击球组件5还包括缓冲垫58,所述缓冲垫58与所述套筒53固定连接,且位于所述套筒53靠近所述电磁铁54一侧。
25.在本实施方式中,通过所述缓冲垫58防止了所述套筒53受吸引力移动时冲击过大,损坏所述电磁铁54,提高了本实用新型的使用寿命。
26.进一步的,所述控球组件4还包括超声波传感器45,所述超声波传感器45与所述气泵43固定连接,并与所述电路板3电连接,且位于所述气泵43一侧。
27.在本实施方式中,通过所述超声波传感器45感知球体的位置,控制所述气泵43工作将球体吸附在所述控球板41上。
28.进一步的,所述底座1包括滑轮11,所述滑轮11与所述底座1固定连接,且位于所述底座1远离所述固定架51一侧。
29.在本实施方式中,通过所述滑轮11实现机器人的移动。
30.本实用新型的工作原理及使用流程:本实用新型安装好过后,包括底座1、滑轮11、蓄电箱2、电路板3、控球组件4和击球组件5,所述控球组件4包括两个控球板41、两个支架42、气泵43、气管44和超声波传感器45,所述击球组件5包括固定架51、推杆52、套筒53、电磁铁54、弹簧55、挡环56、限位块57、缓冲垫58、连接头591和推板59,所述控球板41具有多个吸气孔411。通过所述滑轮11实现本实用新型的移动,在移动的过程中,通过所述超声波传感器45感知球体的位置,所述底座1上的所述气泵43工作使得所述气管44吸气,从而所述控球板41上的多个所述吸气孔411产生吸力,将球吸附在所述控球板41上实现控球。所述套筒53为磁性材质制成,通过所述电路板3控制所述蓄电箱2,所述蓄电箱2给所述电磁铁54通电产生磁性,所述电磁铁54将所述套筒53吸引移动,所述套筒53移动挤压所述电磁铁54,所述缓冲垫58防止了所述套筒53受吸引力移动时冲击过大,损坏所述电磁铁54,提高了本实用新型的使用寿命。所述挡环56同所述套筒53一同移动,所述挡环56将所述弹簧55压缩,从而使所述推杆52移动,所述推杆52推动所述推板59将球击出,实现击球目的。所述推板59增加所述推杆52与球面接触的面积,增强了击球的效果。所述推板59使用时间久后会粘上灰尘,所述连接头591便于更换所述推板59进行清理。所述电路板3控制所述蓄电箱2断电,使所述电磁铁54失去磁性,由于所述电磁铁54不在吸引所述套筒53。所述弹簧55无外力的作用恢复形变,所述弹簧55推动所述挡环56移动,从而推动所述限位块57移动带动所述推杆52移动,实现所述推杆52的复位,重复上述步骤实现机器人击球与控球。所述固定架51对所述击球组件5提供支撑和固定,所述支架42对所述控球板41提供支撑。所述击球组件5,所述本实用新型结构简单、成本低廉适合推广。解决现有足球机器人击球装置传动复杂成本高的问题。
31.以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本实用新型权利要求所作的等同变化,仍属于实用新型所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

