移动角色控制系统
1.对相关申请的交叉引用此申请要求来自于2019年2月14日提交的题为“mobile character control systems(移动角色控制系统)”的美国临时申请序列号62/805,682的优先权和权益,其由此以其整体通过引用并入以用于所有目的。
背景技术:
2.本公开总体上涉及控制系统,并且更具体地涉及移动角色控制系统。
3.此部分旨在向读者介绍以下描述的可能与本公开的各个方面相关的本领域的各个方面。相信此论述有助于向读者提供背景信息,以促进对本公开的各个方面的更好的理解。因此,应当理解的是,这些陈述要从这个角度来阅读,并且不作为对现有技术的承认。
4.通常,木偶、角色、牵线木偶和/或其他创造物(creature)可以经由表演者(诸如木偶操纵者)的动作和/或通过机械致动器而显现成移动。在一些情况下,木偶操纵者的移动可以产生木偶、角色、牵线木偶和/或创造物的对应移动,其可以产生木偶、角色、牵线木偶和/或创造物是活着的幻觉或印象。类似地,除了或代替表演者的移动,致动器、马达和/或其他驱动器可用于引起木偶、角色、牵线木偶和/或创造物的移动。在一些情况下,木偶、角色、牵线木偶和/或创造物的移动可能由表演者的能力所限制。附加地或可替代地,观看木偶、角色、牵线木偶和/或创造物的观众可能注意到控制致动器、马达和/或驱动器的表演者,由此降低木偶、角色、牵线木偶和/或创造物的真实的感觉。
技术实现要素:
5.下面概述与原始要求保护的主题在范围上相称的某些实施例。这些实施例不旨在限制要求保护的主题的范围,而是这些实施例仅旨在提供主题的可能形式的简要概述。实际上,本主题可以包含可以与以下阐述的实施例类似或不同的各种形式。
6.在一实施例中,移动角色控制系统包括被配置为支撑操作者的平台、与平台接合的角色组件、控制系统和运输组件。角色组件包括被配置为模拟创造物的移动的能够致动的特征。控制系统被配置为响应于从由操作者控制的控制特征接收的信号来控制角色组件的能够致动的特征的激活。运输组件被配置为引导平台的移动,以及运输组件被配置为支撑角色组件。
附图说明
7.当参考所附附图阅读以下详细描述时,本公开的这些和其他特征、方面和优点将变得更好理解,其中在整个附图中,相同的符号表示相同的部分,其中:图1是根据本公开的方面的移动角色控制系统的实施例的透视图;图2是根据本公开的方面的移动角色控制系统的实施例的横截面侧视图;以及图3是根据本公开的方面的移动角色控制系统的实施例的顶视图。
具体实施方式
8.以下将描述本公开的一个或多个具体实施例。为了提供这些实施例的简要描述,可以不在说明书中描述实际实施方式的所有特征。应当理解的是,在任何这样的实际实施方式的开发中,如在任何工程或设计项目中,必须做出许多特定于实施方式的决策,以实现开发者的特定目标,诸如对与系统相关和与商业相关的约束的遵守,其可能随实施方式而变化。此外,应当理解的是,这样的开发工作可能是复杂且耗时的,但是对于受益于此公开的那些普通技术人员而言,这将仍然是设计、制作和制造的例行任务。
9.利用木偶、牵线木偶或其他自动形象(例如,角色)可以提供另外虚构的角色或创造物是活着的或活跃的幻觉。例如,表演者可以经由表演者的移动引起木偶的移动。表演者可以移动木偶的特征(例如,头部、臂、腿和/或嘴)以模仿或表演出木偶的移动并产生木偶是活着的幻觉。附加地或可替代地,木偶可经由致动器、马达和/或其他驱动器来控制,所述致动器、马达和/或其他驱动器远程地或由紧邻木偶的表演者引起木偶的移动。遗憾的是,由表演者引起的木偶的移动可能受到限制,因为表演者仅可以控制木偶的某些部分或部件。此外,在一些情况下,观众成员可能认识到表演者经由表演者的移动或经由与致动器相关联的控制件来引导木偶的移动。应当注意的是,术语角色、木偶、牵线木偶、动画的特征和自动形象在整个此公开中能够互换地利用,以指代木偶或可以使其移动被控制以提供自主移动的幻觉的其他形象。
10.本公开的实施例针对一种改进的角色控制系统,其可以隐藏表演者控制木偶或牵线木偶的移动和/或致动对木偶或牵线木偶的移动的控制的能力。例如,本公开涉及一种移动角色控制系统,其使操作者能够控制角色组件的移动,同时被类似于创造物或角色的特征隐藏。例如,移动角色控制系统可以包括运输车、台车、轮子底盘和/或可以支撑角色组件的另一合适的能够运输的框架。角色组件可包括类似于创造物或角色的结构构件或特征、用于控制构件或特征的移动的致动器(例如,电动马达、液压马达)、用于激活或解除激活致动器的自动控制特征(例如,按钮、转向盘、操纵杆、踏板)、用于控制构件或特征的移动的人工控制特征(例如,支撑物、手柄、脚踏物)、辅助特征、以及其任何组合。因此,操作者可以定位在或坐在移动角色控制系统内或远离移动角色控制系统以控制角色组件的移动以模拟创造物或角色的逼真移动。
11.转到附图,图1是根据本公开的实施例的移动角色控制系统10的实施例的透视图。如图1的图示实施例中所示,移动角色控制系统10包括运输组件12和角色组件14。运输组件12可以包括轮子16,轮子16被配置为实现移动角色控制系统10的移动。在其他实施例中,运输组件12可以包括输送器、轨道系统或被配置为驱动移动角色控制系统10的移动的任何其他合适的构件。在一些实施例中,运输组件12可以沿着轨道18引导移动角色控制系统10,该轨道18引导移动角色控制系统10沿着预定路径的移动。在其他实施例中,运输组件12可以实现移动角色控制系统10沿着任何合适的路径的移动,例如,其可以由操作者控制。在一些实施例中,操作者可以定位在或坐在移动角色控制系统10的隔间20内。在其他实施例中,操作者可以远离移动角色控制系统10定位并且被配置为经由远程控制系统22控制移动角色控制系统10的操作。
12.角色组件14可包括类似于具体创造物或角色(例如,机器人、猫、恐龙或另一有机体或动画的物体)的角色框架24。在一些实施例中,角色组件14可以能够移动地耦接到运输
组件12,使得移动角色控制系统10可以通过更换角色组件14来类似于多个创造物或角色。如图1的图示实施例中所示,角色组件14可包括能够致动的特征26,诸如头部28、前腿30(或臂)、后腿32、尾巴34、眼睛36、嘴38和/或其他合适的特征。能够致动的特征26可以经由致动器40和/或人工控制设备42(例如,支撑物、手柄、脚踏物)来控制。移动角色控制系统10还可以包括控制系统44,控制系统44将致动器40通信地耦接到可以被配置为激活、控制和/或解除激活致动器40的各种控制件46(例如,按钮、轮子、操纵杆、控制板)和/或远程控制系统22。
13.在一些实施例中,移动角色控制系统10包括辅助特征48,辅助特征48可以是与角色组件14的主题一致的附件或其他特征。例如,辅助特征48可以包括喷嘴50,喷嘴50可以被配置为将流体流从角色组件14的嘴38朝向交互区52(客人可以定位在该交互区52)和/或朝向另一合适的位置引导。辅助特征48可以形成角色组件14的部分和/或是从角色组件14分开的特征。
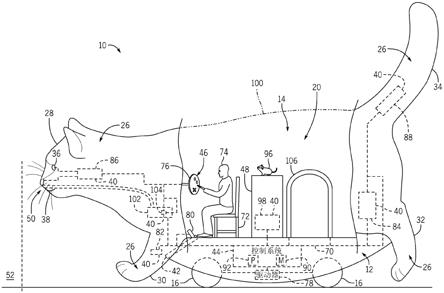
14.图2是移动角色控制系统10的横截面侧视图,其进一步详述了运输组件12、角色组件14和辅助特征48的特征和控制件。例如,角色组件14可以经由运输组件12的平台70(例如,框架)设置在运输组件12上或以其他方式耦接到运输组件12。角色组件14可以至少部分地形成隔间20,隔间20可以包括用于操作者74的座位72。换句话说,角色组件14可以将操作者74从交互区52中的客人的视野隐藏和/或封闭,使得客人可以观看不到操作者74,并且因此相信移动角色控制系统10是活着的、有机的或以其他方式动画的物体(例如,怪物、自动机或机器人)。
15.如图2的图示实施例中所示,隔间20包括转向机构76(例如,转向盘),转向机构76可以包括各种控制件46以使操作者74能够激活能够致动的特征26。转向机构76可以通信地耦接到控制系统44,控制系统44可以向能够致动的特征26发送信号或从能够致动的特征26接收信号。此外,控制系统44可以耦接到驱动器78(例如,马达),该驱动器78被配置为经由运输组件12引导移动角色控制系统10的移动。例如,驱动器78可以被配置为控制轮子16和/或引起移动角色控制系统10的移动的其他合适的构件的移动。在一些实施例中,控制系统44还可通信地耦接到踏板80,踏板80使操作者74能够控制驱动器78或向驱动器78供应动力,由此旋转轮子16以引起移动角色控制系统10的移动。
16.控制系统44还可以通信地耦接到致动器40以实现能够致动的特征26的移动和/或控制。如图2的图示实施例中所示,角色组件14包括被配置为控制前腿30的移动的第一致动器82。在一些实施例中,第一致动器82可被配置为以前后运动来移动前腿30以模拟角色或创造物的移动。第一致动器82可以响应于轮子16的运动和/或响应于通过由操作者74激活的控制件46之一引导到控制系统44的控制信号来移动前腿30。类似地,角色组件14包括被配置为移动后腿32的第二致动器84。在一些实施例中,第二致动器84可被配置为以前后运动来移动后腿32以模拟角色或创造物的移动。第二致动器84可以响应于轮子16的运动和/或响应于通过由操作者74激活的控制件46之一引导到控制系统44的控制信号来移动后腿32。
17.在一实施例中,控制系统44被配置和/或编程为基于控制输入和/或传感器输入的组合以不同的序列和方式(例如,运动的类型)协调致动器。应当注意的是,不同类型的运动包括不同的运动轮廓,其可以被描述为空间中的位置的不同序列。仅仅增加特定类型运动
的速度将不被认为不同类型的运动。例如,为了提供更真实的移动和移动的类型之间的过渡,控制系统44可以考虑转向机构74的转动、行进的方向、行进的速度等,以提供能够致动的特征26(例如,头部28、前腿30(或臂)、后腿32、尾巴34、眼睛36、嘴38和/或其他合适的特征)的移动的组合。具体地,例如,如果在运输组件12未行进时转向机构74沿一方向转动,则致动器可以以模拟不同种类的物理活动或运动的类型(例如,拖曳角色的腿和脚)的第一方式操作。如果在运输组件12行进时转向机构74转动,则可以采用第二操作方式来提供另一类型的运动(例如,来模拟走动的角色的腿和脚)。类似地,可以考虑速度以提供另外的和不同类型或方式的运动。例如,较高的速度可以引起类似于疾驰的致动,而较低的速度可以引起类似于慢走的致动。这些不仅仅是以不同速度的相同类型的运动。此外,反向和向前运动可以引起不同类型的致动,以类似于向后疾走或向前冲刺。根据本实施例,向后移动将不导致对于向前移动的运动的仅仅的逆转。类似地,如前所述,转动时沿一方向移动将不仅仅提供与在静止时转动相同的运动。这些控制配置和程序的技术益处包括将观众吸引到期望的幻觉中的更真实和沉浸的系统。
18.此外,角色组件14可以包括被配置为移动头部28、眼睛36和/或嘴38的第三致动器86。虽然图2的图示实施例示出了控制头部28、眼睛36和嘴38的第三致动器86,但是在其他实施例中,角色组件14可以包括单独地或彼此独立地控制头部28、眼睛36和嘴38的附加致动器40。此外,角色组件14包括可以被配置为移动尾巴34的第四致动器88。第三致动器86和/或第四致动器88可由操作者74经由一个或多个控制件46激活或控制。在其他实施例中,第三致动器86和/或第四致动器88可以经由存储在存储器90中并由控制系统44的处理器92执行的预编程序列激活。例如,控制件46可以使操作者74能够将角色组件14置于空闲状态中,其中角色组件14的能够致动的特征26的移动遵循预定的或预编程的序列。空闲状态可以定义为在由操作者74激活时和/或在非激活的阈值时间(例如,控制件46的不致动达30秒的时间段)之后通过角色组件14的控制方面(例如,控制系统44)进入的控制的状态。例如,操作者74可以激活控制件46以将角色组件14置于空闲状态中并在没有通过操作者74的另外的交互的情况下实现移动。附加地或可替代地,控制系统44可以检测到操作者74在预定时间间隔(例如,10秒、20秒、30秒)内没有接合控制件46并且自动地将角色组件74置于空闲状态中。
19.在一些实施例中,能够致动的特征26还可由操作者74人工地控制。例如,角色组件14包括人工控制件42(例如,支撑物、手柄),操作者74物理地移动该人工控制件42以便产生能够致动的特征26的移动。人工控制件42可以响应于操作者74的移动通过模仿或以其他方式移动来使角色组件14能够以更逼真的方式移动。在任何情况下,角色组件14可以被配置为经由致动器40和/或人工控制件42移动以产生角色是有机体或以其他方式动画的幻觉或感知。
20.此外,角色组件14包括辅助特征48,辅助特征48可被描绘为具有二级角色96的伸缩台。在一些实施例中,伸缩台可由第五致动器98控制,第五致动器98将二级角色移动在角色组件14的阻挡物100之外和/或之上以进入到交互区52中的客人的视野中。第五致动器98可以通信地耦接到控制系统44,其可以响应于由操作者74对控制件46之一的激活而致动伸缩台并引导第二角色96的移动。在其他实施例中,辅助特征48可以包括被配置为模拟角色的部分(例如,背部)的伸展或其他移动的伸缩台。在更进一步的实施例中,辅助特征48可以
包括植物、支柱、鞍和/或与角色组件14的主题一致的另一合适的特征。
21.如上所论述的,角色组件14还可包括耦接到流体箱102的喷嘴50,流体箱102为喷嘴50供应流体。在一些实施例中,第六致动器104(例如,泵)可以将流体从流体箱102引导出角色组件14的嘴38。因此,第六致动器104可以通信地耦接到控制系统44并且响应于由操作者74对控制件46之一的激活而从流体箱102引导流体。在一些实施例中,喷嘴50可以合并到辅助特征48中,并且除了或代替从角色组件14的嘴38引导流体,还实现从辅助特征引导流体。
22.角色组件14和/或运输组件12还可以包括二级或补充运输设备106,诸如可以利用液压流体和/或液压压力来实现移动角色控制系统10的移动的液压运动杆。在一些实施例中,二级或补充运输设备106可被配置为提升和/或降低运输组件12的平台70以控制轮子16的移动。例如,操作者74可以人工地将平台70的位置升起到使轮子16能够沿着地面和/或轨道18滚动的预定高度,使得移动角色控制系统10可以由操作者74推动或滚动。此外,操作者74可以通过利用二级或补充运输设备106将平台70降低到附加预定高度(例如,相对于地面低于预定高度)来阻止移动角色控制系统10的移动。换句话说,平台可以定位在地面和/或另一表面上以阻止移动角色控制系统10和轮子16的移动。因此,移动角色控制系统10可以经由驱动器78和/或二级或补充运输设备106接合在移动中。
23.图3是移动角色控制系统10的实施例的俯视图。具体地,图3图示了可由操作者74利用来激活、解除激活或以其他方式控制能够致动的特征26的各种控制件46。此外,图3示出了人工控制设备42,其可以被操作者74佩戴或以其他方式利用以人工地控制角色组件14的移动。例如,如图3的图示实施例中所示,转向机构76(例如,转向盘)可以包括各种控制件46,诸如第一按钮120、第二按钮122、控制板124和/或操纵杆126。操作者74可以按压第一按钮120和/或第二按钮122以在各种能够致动的特征26之间切换控制和/或激活能够致动的特征26。在一些实施例中,控制板124和/或操纵杆126可以由操作者74利用来调整头部28、前腿30(或臂)、后腿32、尾巴34、眼睛36、嘴38和/或角色组件13的其他合适的特征的位置。此外,第一按钮120、第二按钮122、控制板124和/或操纵杆126可被利用以控制辅助特征48和/或喷嘴50。
24.角色组件14还可包括踏板80和转向机构76以控制移动角色控制系统10的移动。例如,操作者74可以踩踏板80以引导移动角色控制系统10的移动或阻止移动角色控制系统10的移动并且利用转向机构76来控制移动角色控制系统10的移动的方向。附加地或可替代地,操作者74可以利用二级或补充运输设备106来引起移动角色控制系统10的移动(例如,经由升起和/或降低平台70的液压升降机)。
25.如图3的图示实施例中所示,操作者74还可以利用支撑物130、手柄132或其他人工控制件来调整头部28、前腿30(或臂)、后腿32、尾巴34、眼睛36、嘴38、和/或角色组件14的其他合适的特征的移动。因此,操作者74的移动可以被传递到角色组件14的各种特征以模拟角色的移动。
26.如上所阐述的,在其他实施例中,移动角色控制系统10可以由操作者74远程控制,而不是操作者74定位在角色组件14的隔间20中。在这样的实施例中,操作者74可以使用包括控制件46的远程控制系统22以使操作者74能够从远离角色组件14的位置模拟角色组件14的移动。因此,远程控制系统22可以与控制系统44无线通信以实现控制件46和能够致动
的特征26之间的通信。在任何情况下,移动角色控制系统10可以模拟角色的移动,并为观看移动角色控制系统10的客人提供逼真的体验,以增强客人的娱乐性。
27.虽然在本文中图示和描述了所公开的实施例的仅某些特征,但是本领域技术人员将想到许多修改和改变。因此,要理解的是,所附权利要求书旨在涵盖如落入本公开的实质精神内的所有这样的修改和改变。
28.本文中呈现和要求保护的技术被引用和应用于明显改进本技术领域的具有实际性质的实物和具体示例,并且因此不是抽象的、无形的或纯粹理论的。此外,如果附到此说明书的末尾的任何权利要求包含指定为“用于[执行][功能]的装置
……”
或者“用于[执行][功能]的步骤
……”
的一个或多个元件,则其旨在要根据35 u.s.c.112(f)来解释这样的元件。然而,对于包含以任何其他方式指定的元件的任何权利要求,其旨在不要根据35 u.s.c.112(f)来解释这样的元件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

