一种基于流场速度分解方法的auv稳定悬停装置
技术领域
1.本实用新型涉及水下机器人技术领域,特别涉及一种基于流场速度分解方法的auv稳定悬停装置。
背景技术:
2.随着当今世界科技的发展,人类正竭尽所能的探索着那些从未涉足过的地区。在这些区域中,丰富的海洋资源无疑是各国争夺的热点,海洋探索能力的高低成为各国能否率先在海洋中占得一席之地的关键。鉴于海洋的复杂环境以及人类身体耐受程度的局限性,auv(自主式水下航行器)成为了代替人类进行深海作业的最佳选择。
3.经过几十年的努力,人们已经掌握了不少auv的技术,auv的作用也从探测海洋资源,延伸到了军事领域、民生领域、生态保护领域等多个方面。但海洋探索的条件尤为苛刻,auv的稳定悬停问题一直得不到很好的解决方法。目前,对于乱流的影响,主要采用模拟计算来进行受力的判断,进而进行auv姿态的调整。但这会引入大量的计算,并且受限于模拟计算的速度,并不能实时的根据流动状态的变化自主进行姿态的及时调整。
技术实现要素:
4.为了使auv在受到乱流影响时,自主快速的调整姿态并保证其稳定悬停,本实用新型公开了一种基于流场速度分解方法的auv稳定悬停装置,包括auv主体,所述auv主体表面设有x轴流速传感器、y轴流速传感器、z轴流速传感器,x轴流速传感器安装在auv主体前端顶部位置,y轴流速传感器安装在auv主体中部顶部位置,z轴流速传感器安装在auv主体中部侧面位置;
5.auv主体侧面按对称布局排布设置有多个矢量推进器,多个所述矢量推进器与所述auv主体轴线在同一水平面,任一所述矢量推进器具有在水平面180度和竖直面180度的调节范围;
6.auv主体的内部设有俯仰姿态调节装置,所述俯仰姿态调节装置包括陀螺仪,所述陀螺仪安装在auv主体内部前端,用于设定悬停角度并提供实时角度变化;
7.所述俯仰姿态调节装置还包括步进电机、滑轨和配重块,所述配重块安装在所述滑轨上,在所述滑轨的末端安装步进电机,所述步进电机安装于auv主体1内部后端;所述步进电机与所述矢量推进器相互配合,能够实现对auv进退、侧移、潜浮、摇艏、横倾和纵倾的六个自由度控制。
8.可选地,所述陀螺仪与所述步进电机配重平衡。
9.可选地,所述配重块与所述滑轨之间装有滑动装置以减小摩擦。
10.可选地,所述矢量推进器按对称布局排布设置在auv的侧面1/4、3/4处。
11.可选地,所述配重块在正面反面应贴有防撞橡胶垫。
12.可选地,所述流场速度分解计算的方法,包括如下步骤:
13.步骤1、以auv浮力重心为原点,auv主轴为x轴,建立载体坐标系,把来流在x、y、z方
向的分量表示出来,设定好auv悬停时与初始时刻载体坐标系下与轴的夹角θ
x
、θ
y
、θ
z
;
14.步骤2、用势流叠加原理对auv表面流动进行分析,进而得到流速在auv表面的流速分布,由g
‑
s方程,推算出auv在不同方向上的压力分布,得到整体合力即auv受力;
15.步骤3、将auv主体受力合力求出后,由矢量推进器施加反向推力对进退、滑移、潜浮、横倾、摇艏的五个自由度进行控制;采用陀螺仪与步进电机互相搭配实现纵倾自由度的控制。
16.所述步骤2还包括:步骤201、在计算侧面受力时,由于侧面绕流类似于圆柱绕流,其尾部负压区流动状态复杂,进行实时计算时间较长,为了使auv迅速根据侧面的来流求解受力情况,应提前在auv测试时由不同的u
θ∞
下得到负压力的节点数据并做平滑处理,在计算侧面受力情况时直接调用数据,以保证计算的精确性。
17.所述步骤2还包括:步骤202、在设定好的auv的x轴的偏转角度θ
x
后,利用auv重力矩等于矢量推进器对x轴取矩得到矢量推进器的推力变化δf
τx
,根据设定好的auv的z轴的偏转角度θ
z
后,通过矩运算得到推力变化δf
τz
。
18.采用上述技术方案,本实用新型具有如下有益效果:
19.本实用新型基于流场速度分解方法的auv稳定悬停装置,其实现了抛开大量的模拟计算,通过auv外部加装流速传感器以及陀螺仪进行少量的线性计算,由矢量推进器施加反向推力和调整配重块位置配合可以使auv在不同姿态下快速实现悬停稳定。该装置整体结构简单,设备维护方便,计算快速,可以根据实时数据迅速进行调整,适合多种不同类型auv。
附图说明
20.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
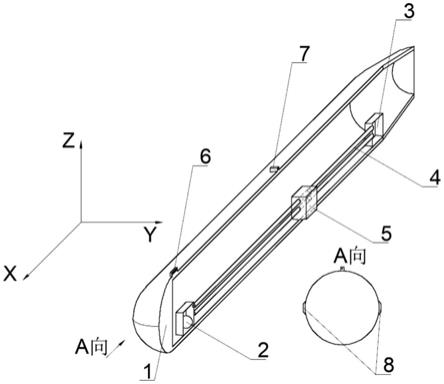
21.图1为本实用新型auv主体部分的稳定装置立体示意图;
22.图2为本实用新型auv的矢量推进器排布的示意图;
23.图3为图2中a部的放大示意图;
24.图4为配重块工作原理示意图;
25.图5为实用新型auv稳定装置工作流程图。
26.图中:auv主体1、陀螺仪2、步进电机3、滑轨4、配重块5、x轴流速传感器6、y轴流速传感器7、z轴流速传感器8、矢量推进器9。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.实施例:
29.如图1
‑
2所示,一种基于流场速度分解方法的auv稳定悬停装置,包括auv主体1,所述auv主体1表面设有x轴流速传感器6、y轴流速传感器7、z轴流速传感器8,x轴流速传感器6安装在auv主体1前端顶部位置,y轴流速传感器7安装在auv主体1中部顶部位置,z轴流速传感器8安装在auv主体1中部侧面位置;
30.auv主体1侧面按对称布局排布设置有多个矢量推进器9,多个所述矢量推进器9与所述auv主体1轴线在同一水平面,任一所述矢量推进器9具有在水平面180度和竖直面180度的调节范围;
31.auv主体1的内部设有俯仰姿态调节装置,所述俯仰姿态调节装置包括陀螺仪2,所述陀螺仪2安装在auv主体1内部前端,用于设定悬停角度并提供实时角度变化;
32.所述俯仰姿态调节装置还包括步进电机3、滑轨4和配重块5,所述配重块5安装在所述滑轨4上,在所述滑轨4的末端安装步进电机3,所述步进电机3安装于auv主体1内部后端;
33.所述步进电机3与所述矢量推进器9相互配合,能够实现对auv进退、侧移、潜浮、摇艏、横倾和纵倾的六个自由度控制。
34.所述陀螺仪2与所述步进电机3配重平衡。
35.所述配重块5与所述滑轨4之间装有滑动装置以减小摩擦。
36.所述矢量推进器9按对称布局排布设置在auv的侧面1/4、3/4处。
37.所述配重块5在正面反面应贴有防撞橡胶垫,以防止配重块5行程过大撞击陀螺仪2与步进电机3。
38.所述x轴流速传感器6、y轴流速传感器7、z轴流速传感器8以正交方式安装在所述auv主体1表面以减小对流动的影响,既可以理解为三个方向的传感器按三维空间正交布置,保证测量的流速是auv主体1表面的流速。
39.如图2
‑
3所示,矢量推进器9采用锥齿轮组进行调节,在工作时可以按要求随时调整方向与大小,且在最大转动角度情况下与auv主体1存在一定安全距离,其角度可在水平面180度和竖直面180度的调节范围。
40.所述滑轨4在不影响陀螺仪2与步进电机3安装的情况下采取最大长度。步进电机3安装在滑轨4的尾部通过控制螺纹杆的转动来使配重块5移动以调整auv俯仰角度。
41.工作时,在auv到达指定工作点位并调整好工作姿态时,开启稳定悬停;流速传感器开始记录数据,通过流速的数据推算出无穷远处流速的大小。
42.根据不同方向的流速数据,由g
‑
s方程,推算出auv在不同方向上的压力分布,最终得到auv整体的受力大小与方向。但推进器的推力还要保证两个角旋转自由度的稳定,因此此时的受力大小并不能作为推进器最终施加的力的大小。
43.通过实际角度与设定角度的差值对旋转轴取矩,得到各轴平衡力矩所需施加的额外推力,处理器将此推力与之前的推力数据处理为合力数据后,由矢量推进器施加反向推力。
44.考虑到所述auv在工作状态时可能会长时间处于非水平状态,采用陀螺仪、步进电机、滑轨与配重块搭配实现俯仰姿态的稳定,由中所述根据实际角度与设定角度的差值对旋转轴取矩求力的过程中,不计算纵倾角度变化带来的矢量推进器推力变化,如图4所示,当auv纵倾角与设定角度不同时,步进电机根据纵倾角度的变化对配重块进行相应的位移,
达到调整auv纵倾角度的目的。
45.如图5所示,设定好auv水下姿态后,开启稳定,流速传感器测出流速数据计算auv受力,并根据角度差值测出保证auv姿态稳定的推力,将两组推力矢量合成,由矢量推进器根据实时数据提供相应的推力,步进电机也可以保证配重块位移至相应的位置。完成在不需要人工处理的情况下达到auv的稳定悬停,以保证水下工作的稳定进行。
46.在一些实施例中,auv主体(1)在面对来流时的受力与其外形有着密切的关系,不同的auv在面对来流时的受力分析会有所不同。为简单描述其计算方法,该实用新型选择了一种如附图auv外型作为示例,但不代表本实用新型只适合此类型的auv。
47.auv稳定悬停装置采用的流场速度分解计算的方法,包括如下步骤:
48.步骤1、以auv浮力重心为原点,auv主轴为x轴,建立载体坐标系,把来流在x、y、z方向的分量表示出来,设定好auv悬停时与初始时刻坐标系下与轴的夹角θ
x
、θ
y
、θ
z
;
49.步骤2、用势流叠加原理对auv表面流动进行分析,进而得到流速在auv表面的流速分布,由g
‑
s方程,推算出auv在不同方向上的压力分布,得到整体合力即auv受力;
50.步骤3、将auv主体受力合力求出后,由矢量推进器(9)施加反向推力对进退、滑移、潜浮、横倾、摇艏的五个自由度进行控制;采用陀螺仪(2)与步进电机(3)互相搭配实现纵倾自由度的控制。
51.所述步骤2还包括:
52.步骤201、在计算侧面受力时,侧面绕流类似于圆柱绕流,其尾部负压区流动状态复杂,进行实时计算时间较长,为了使auv迅速根据侧面的来流求解受力情况,应提前在auv测试时由不同的u
θ∞
下得到负压力的节点数据并做平滑处理,在计算侧面受力情况时直接调用数据,以保证计算的精确性。
53.所述步骤2还包括:
54.步骤202、在设定好的auv的x轴的偏转角度θ
x
(横倾)后,利用auv重力矩等于矢量推进器(9)对x轴取矩得到矢量推进器(9)的推力变化δf
τx
,根据设定好的auv的z轴的偏转角度θ
z
(摇艏)后,通过矩运算得到推力变化δf
τz
。
55.所述矢量推进器(9)在得到五组推力数据后迅速自动调整推力方向与大小,施加与auv主体(1)受力方向相反的力以保证auv在五个自由度上的稳定性,步进电机(3)与配重块(5)互相搭配以实现第六个自由度(纵倾)的控制。
56.利用流场速度的分解并配合线性方程快速进行推力的反算,由矢量推进装置(9)施加最终计算得到的推力和步进电机(3)带动配重块(5)实时调整俯仰角度完成auv的稳定悬停。
57.接下来,对该实施例中稳定悬停装置工作的流场速度分解方法作进一步详细描述。
58.分析auv在水中受到的合外力,可表示为:其中,f
f
是作用在auv的水动力,b为auv的浮力,g为auv的重力,是所有矢量推进器的合力表达。其中,b与g在auv的排水量一定的情况下是恒定的。为了提高机械的稳定性,需要对其6个方向上的自由度进行限制。
59.其流场速度分解方法具体步骤如下:
60.s100:由三组流速传感器测量的数据建立流场,
61.在x
‑
r
‑
θ极坐标系下表示为
62.由圆柱绕流的势流叠加公式:
63.其中θ为auv表面点与原点的连线与x轴的夹角,
64.推得流体绕过球体时的径向速度
65.圆周速度
66.(需要说明的是,同轴向方向取逆时针为正,下文圆周速度不做特殊表述皆默认此规定);
67.当r=r0时,得到圆柱体表面的径向速度u
r
和圆周速度u
θ
大小的分布公式对表面流线各点进行g
‑
s方程运算,
68.得x方向压力为:即
69.利用经验公式可得x方向上的黏滞力为:
70.x方向上的合力可以表示为f
x
=f
px
f
f
;
71.s200:由s100中势流函数可得到流体流过auv侧面表面的径向速度v
r
和圆周速度v
θ
的分布公式
72.其中,θ是无穷远处来流方向在yoz平面的投影与y轴的夹角,反推出无穷远处的来流速度
73.由g
‑
s方程,压力面积分可得正面压力
74.在来流方向的背面产生的负压区的计算与不同流速下的雷诺数re及边界层分离有关,而且实际流体在绕过机械的圆柱侧面后会根据re的大小出现不同的流动状态,因此背部负压区带来的力f
‑
l
在auv测试时由不同的u
θ
得到对应的f
‑
l
节点数据并做平滑处理以方便调用;
75.则侧面受力在来流方向的大小等于f=f
l
f
‑
l
,
76.其中进而得到f
l
在y,z方向上的分力为:
77.78.s300:分别对三种转动自由度控制;
79.①
绕x轴的角转动自由度控制(横倾):在设定好机械的x轴偏转角度θ
x
后,由auv重力矩和矢量推进器力矩的平衡得到矢量推进器的推力,即
80.其中l
x
为作用是auv重心到旋转轴的力臂,f
τxi
为每一个可对x轴取矩的矢量推进器推力大小,l
xi
是矢量推进器至旋转轴的力臂;
81.矢量推进器在机器遇到来流时,会使其实际偏转角度θ
′
x
与设定的偏转角度θ
x
出现偏差,因而在此基础上,由角度差值得到其实际推力的变化应为其中l
x
=h cosθ
x
,l
′
x
=h cosθ
′
x
,h为auv重心至旋转轴的距离,k为灵敏度系数,原则上不大于1;需要说明的是,此处的δf
τxi
的正负不代表矢量推进器推力的大小变化,而是代表矢量推进器对x轴施加的扭矩变化方向,x轴正向取逆时针为正,n个矢量推进器之间的力矩变化分配可视情况而定,总力矩符合上述公式即可;
82.②
绕z轴的角转动自由度控制(摇艏):可对z轴取矩,得绕z轴的角转动自由度控制(摇艏):可对z轴取矩,得其中δf
τzi
l
zi
为第i个可对z轴取矩的矢量推进器的扭矩变化值,正负不代表矢量推进器推力的大小变化,而是代表矢量推进器对z轴施加扭矩的方向,z轴同向取逆时针为正;
83.θ
z
为以z轴为中心设定偏转角,θ
′
z
为实际偏转角,k
z
表示灵敏度系数,取值可以参考l为机械长度,为l
zi
的平均值,n个矢量推进器之间的力矩变化分配可视情况而定,总力矩符合上述公式即可;
84.③
绕y轴的角转动自由度控制(纵倾):对于纵倾,考虑到矢量推进器的布局、数据处理的复杂性以及auv通常的结构,采用步进电机和配重块的配合来实现其在y轴方向上的纵倾稳定,把能使auv保持水平的配重块在滑轨上的位置记为原点,沿滑轨由后向前建立一维坐标系l,θ
y
为滑轨绕y轴轴的转动角,则配重块的运动变量可以表示为:其中θ
y
为设定偏转角,θ
′
为实际偏转角,k
y
为灵敏度系数;v最后结果正负号不代表大小而是配重块在坐标系l上的位移方向,正号前移;
85.s400:将s100、s200、s300中的
‑
f
x
、
‑
f
y
、
‑
f
z
、δf
τxi
、δf
τzi
的数值在空间方向上进行叠加,最终得到推力的合力数据,并由矢量推进器施加推力,同时,步进电机根据s300中计算v对配重块进行相应的位移,完成auv主体的稳定。
86.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

