行驶控制装置、行驶控制方法以及计算机程序
1.本技术以日本专利申请2020-045748(申请日:03/16/2020)为基础,根据该申请来享受优先利益。本技术通过参照该申请而包含该申请的全部内容。
技术领域
2.本发明的实施方式涉及行驶控制装置、行驶控制方法以及计算机程序。
背景技术:
3.在使多个移动体同时行驶的情况下,当发生移动体间的碰撞、拥堵等时,作为系统整体是没有效率的。寻求用于使多个移动体高效地行驶的行驶控制。
技术实现要素:
4.本发明的实施方式提供用于使多个移动体高效地行驶的行驶控制装置、行驶控制方法以及计算机程序。
5.用于解决问题的技术方案
6.本实施方式涉及的行驶控制装置具备:控制部,其基于多个移动体的行驶计划来对所述多个移动体的行驶进行控制;计划部,其对所述行驶计划的一部分进行变更来生成多个临时行驶计划;评价值算出部,其基于所述临时行驶计划中的所述多个移动体的状态特征量,算出所述临时行驶计划的评价值;以及模型,其将多个移动体的状态特征量和评价值相关联,所述评价值算出部基于所述模型和所述临时行驶计划中的所述多个移动体的状态特征量来算出所述评价值,所述计划部进行搜索运算,所述搜索运算反复进行如下处理:基于多个所述评价值从所述多个临时行驶计划中选择临时行驶计划,通过所选择的所述临时行驶计划来对所述行驶计划进行更新。
附图说明
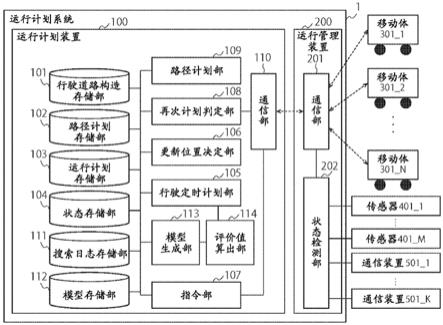
7.图1是表示第1实施方式涉及的包括运行计划系统的整体系统结构的一个例子的图。
8.图2是表示行驶道路网络的一个例子的图。
9.图3是表示移动体彼此的竞争的例子的图。
10.图4是表示行驶道路构造信息的例子的图。
11.图5是表示行驶道路构造信息的其他例子的图。
12.图6是表示路径计划的例子的图。
13.图7是表示多个移动体的行驶定时计划的例子的图。
14.图8表示运行计划的一部分的例子。
15.图9是表示多个移动体的状态特征量的例子的图。
16.图10是表示位置的特征量的例子的图。
17.图11是运行计划系统的处理的流程图。
18.图12是行驶定时计划部的详细处理的流程图。
19.图13是表示竞争检查和躲避处理的一个例子的图。
20.图14是表示竞争检查和躲避处理的其他例子的图。
21.图15是行驶定时计划部的搜索处理的意象图。
22.图16是运用计划装置的硬件框图。
23.图17是表示第2实施方式涉及的包括运行计划系统的整体系统结构的一个例子的图。
24.图18是第2实施方式涉及的运行计划系统的处理的流程图。
25.图19是表示第3实施方式涉及的包括运行计划系统的整体系统结构的一个例子的图。
26.图20是第3实施方式涉及的运行计划系统的处理的流程图。
27.图21是表示第4实施方式涉及的包括运行计划系统的整体系统结构的一个例子的图。
28.图22是表示第5实施方式涉及的包括运行计划系统的整体系统结构的一个例子的图。
29.标号说明
30.1:运行计划系统
31.100:运行计划装置
32.101:行驶道路构造存储部
33.102:路径计划存储部
34.103:运行计划存储部
35.104:状态存储部
36.105:行驶定时计划部(计划部)
37.106:更新位置决定部
38.107:指令部(控制部)
39.108:再次计划判定部
40.109:路径计划部
41.110:通信部
42.111:搜索日志(log)存储部
43.112:模型存储部
44.113:模型生成部
45.114:评价值算出部
46.115:行驶日志存储部
47.200:运行管理装置
48.201:通信部
49.202:状态检测部
50.301_1~301_n:移动体
51.401_1~401_m:传感器
52.501_1~501_k:通信装置
具体实施方式
53.对本实施方式的技术背景进行说明。
54.近年来,伴随着多品种少量生产的一般化,变得需要创造出生产工序中的灵活性。例如,对生产线的各工序进行模块化,自由地进行重组来用agv(无人搬送车)在工序之间进行搬送,一边使作业用的带臂的移动机器人在多个作业场所中移动,一边使之进行作业。
55.另外,以物流现场的严重的人手不足为背景,在网络销售等的物流中心中,正在加速要实现节省人力化。例如,具有通过组合agv、自动行驶叉车以及拣选机器人等来对此进行应对的方法等。
56.进一步,伴随着汽车的自动行驶技术的进步,在无人状态下使汽车组群在停车场中自动行驶来进行停车的自动代客泊车(valet parking)、在施工现场、采掘场等中使被远程操纵的无人的工程机械移动体进行行驶等的尝试也达到了实用阶段。
57.为了在狭窄的区域内高效率地对大量的自动行驶移动体的移动进行控制,需要避免碰撞、僵持(deadlock)这样的移动体彼此的竞争(竞合)。到目前为止,一般是通过预先设置能够双向同时行驶的多线行驶道路、多个单向环以及格子状等的专用行驶道路、行驶空间来对此进行应对。
58.以使用这样的专用行驶道路等为前提,在某关联技术中,制订计划以使得在全部移动体的路径中不产生同一行驶道路的相反方向的移动。然而,当挪用操作员也要使用的已有通路来进行阶段性的导入时,即使是在利用在同一行驶道路中不得不发生双向移动的形状的行驶道路的情况下、或者因安全等的理由等而预先指定发生双向移动的路径的情况下,也需要能够通用性地制订运行计划的系统。在上述的关联技术中,难以在该条件下应用。
59.另外,作为其他的关联技术,具有如下技术:一台一台地决定移动体的行驶计划(对移动体进行预约),决定接下来的移动体的行驶计划以使得不发生与先进行了预约的移动体相反方向的行驶。在该关联技术中存在如下问题:行驶效率较大地左右于移动体的预约顺序,整体的效率会恶化。
60.另外,使用专用的行驶道路等具有如下问题:会花费施工成本,开始利用后的行驶道路布局的阶段性的变更也不容易。
61.本实施方式实现在这样使agv、移动机器人等多个移动体进行行驶的情况下使之高效地进行行驶以使得不产生移动体间的碰撞或者僵持等的竞争。作为一个例子,本实施方式中作为移动体而对在预先铺设的轨道、导带等专用的行驶道路上行驶的情况进行处理,但本实施方式也可以应用于一边确定自我位置、一边在自由平面上行驶的自主行驶型的移动体。以下,对本实施方式进行详细的说明。
62.以下,参照附图对本发明的实施方式进行说明。
63.图1表示第1实施方式涉及的具备运行计划系统的整体系统结构的一个例子。整体系统结构具备运行计划系统1、多个移动体301_1~301_n、多个传感器401_1~401_m、多个通信装置501_1~501_k。运行计划系统1具备运行计划装置100、运行管理装置200。将任意的移动体记载为移动体301。将任意的传感器记载为传感器401。将任意的通信装置记载为通信装置501。
64.运行计划装置100和运行管理装置200也可以存在于相同的计算机系统上。或者,
运行计划装置100和运行管理装置200也可以存在于不同的计算机系统上,相互经由网络连接。
65.运行计划系统1例如在狭窄的区域配置由多个行驶道路构成的行驶道路网络、大量的移动体以低速在行驶道路网络中进行自动行驶的情况下,作为整体效率良好地对运行进行控制,以使得不发生僵持或者碰撞等的竞争。
66.移动体301_1~301_n是agv(无人搬送车:automatic guided vehicle)、自主型的移动机器人、自动行驶的车辆(例如自动行驶车)等的能够自动地进行移动的移动体。移动体301_1~301_n例如在配置于工厂内、仓库内、设施用地内等区域的行驶道路网络中进行行驶。
67.图2是表示行驶道路网络的例子的俯视图。示意性地示出了在行驶道路网络中对多个移动体的运行进行控制的状况。在某设施的楼层配置有基于导带10的行驶道路网络。通过组合直线的导带10来作为行驶道路,构成了行驶道路网络。在该例子中,各个行驶道路为直线的形状,但这不过是一个例子。行驶道路既可以是曲线的形状,也可以是组合了直线和曲线的形状。
68.此外,具有除导带之外还在行驶道路上的重要地点配置标记的方法、移动体自身检测自我位置来在假想的行驶道路网络上行驶的情况等多个方法,行驶道路网络的实现方法不限定于此。
69.移动体12a、12b、12c、12d、12e、12f、12g、12h、12i、12j、12k、12l对应于图1的移动体301,能够沿着导带10向前方向、后方向或者前后两方向移动。移动体也可以能够进行旋转以使得将前后反转。另外,移动体也能够依赖于行驶道路的形状来向斜方向等的前后以外的方向移动。
70.在行驶道路的端部、行驶道路彼此的交叉部(例如分支合流部)的附近设置有搬入口13a、13b、13c、13d、13e、13f以及架子14a、14b、14c、14d、14e。在行驶道路的端部、行驶道路彼此的交叉部附近、行驶道路的途中(行驶道路的两端之间)、其他任意的地方配置有架子14a~14e,在搬入口13a~13f的全部或者一部分配置有图1的传感器401和通信装置501。
71.移动体12a~12l在图1的运行计划系统1的管理下在各行驶道路上进行移动,进行预先指示的作业。例如,从搬入口接受货物,将所接受的货物运送堆积到架子。另外,从架子取出货物,将货物运到搬入口。图中的双层圆示意性地表示货物。各移动体基于由运行计划系统1提供的移动指令数据来自动地进行这样的移动和作业。此外,作业不限定于货物的搬送,另外,有时也有可能不进行作业而只是进行移动。
72.本实施方式涉及的运行计划装置100基于各移动体应该进行的作业的内容和作业的顺序,生成表示了各移动体应该行驶的路径的路径计划(有时也预先提供各移动体的路径计划),基于路径计划,生成决定了各移动体在各行驶道路上行驶的定时以使得各移动体不发生碰撞或者僵持的行驶计划(以下称为行驶定时计划)。运行管理装置200通过向各移动体发送基于各移动体的行驶定时计划的移动指令数据,对各移动体的运行进行控制。另外,运行管理装置200对各移动体的状态进行检测,对各移动体的运行进行管理。
73.在此,僵持是指成为任意移动体无法在行驶网络中的任意交叉部(例如分支合流部)或者行驶道路的端部进行移动的状态。碰撞是指移动体与其他移动体接触。
74.图3的(a)表示僵持的例子,图3的(b)表示碰撞的例子。在图3的(a)中,两个移动体
在相同的行驶道路上向相互相反的方向行驶。设为两个移动体仅能够前进。在该情况下,两个移动体无法在任意的交叉部或者端部进行移动,会产生僵持。在图3的(b)中,两个移动体在相同的行驶道路上向相同的方向行驶,但后方的移动体的速度比前方的移动体的速度快,因此,后方的移动体会与前方的移动体碰撞。
75.将这样发生僵持或者碰撞表现为移动体竞争(或者干涉)。但是,竞争不限定于该例子。例如,也可以是两个移动体同时到达交叉部(分支合流部)。
76.图1的运行计划系统1是实现不使各移动体产生竞争(碰撞或者僵持等)、高效地进行各移动体的运行的系统。
77.图1的运行计划装置100具备行驶道路构造存储部101、路径计划存储部102、运行计划存储部103、状态存储部104、行驶定时计划部(计划部)105、更新位置决定部106、指令部(控制部)107、再次计划判定部108、路径计划部109、搜索日志存储部111、模型存储部112、模型生成部113、评价值算出部114以及通信部110。也可以设置有由本装置100的用户进行各种指示或者数据的输入的输入装置(例如鼠标、键盘、触摸面板)。另外,也可以在本装置100设置有显示各存储部内的数据或者由各部生成的数据的显示装置(例如液晶显示器、有机电致发光显示器)。
78.运行计划装置100的通信部110与运行管理装置200的通信部201进行通信。通信部110和通信部201之间的通信既可以是通过无线实现的通信,也可以是通过有线实现的通信。运行管理装置200的通信部201与运行计划装置100的通信部110和移动体301进行通信。通信部201与移动体301的通信为无线通信。但是,不排除有线通信。一部分或者全部的移动体301也可以无法与通信部201进行通信。但是,在该情况下,移动体301也能够与设置于路侧的通信装置501(后述)进行通信。移动体301能够在通信装置501的能够通信的范围内与通信装置501进行通信。也可以在运行计划装置100和运行管理装置200为相同的装置的情况下,省略通信部110。
79.行驶道路构造存储部101在内部存储有表示行驶道路网络的构造的信息(行驶道路构造信息)。行驶道路构造信息例如能够作为包括多个节点和将节点间连接的多个弧线(行驶道路)的图解构造来进行表现。
80.图4表示行驶道路构造信息的例子。各个行驶道路由将节点间结合的直线表示。图4的(a)的各圆表示节点,将圆之间连接的线段表示弧线(行驶道路)。节点表示行驶道路的端部以及行驶道路彼此的交叉部。将在行驶道路网络中预先指定的地方称为指定区域。也容许将用户任意地确定的地方作为指定区域。能够将货物的堆积、装卸场所、待机场所等的任意地方指定为指定区域。作为一个例子,与交叉部连接的行驶道路端部、与交叉部不连接的行驶道路端部(行驶道路的尽头)为这样的场所。另外,也可以将行驶道路的任意地方(例如行驶道路的两端间的任意区域)作为指定区域。也可以将交叉部本身作为指定区域。移动体通过指定区域,或者暂时逗留在指定区域。作为移动体暂时逗留的例子,存在为了作业而暂时停止、为了等待其他移动体通过行驶道路而暂时停止、不存在应该进行的作业而停止直到产生接下来的作业、用于充电的待机、自动驾驶车的停车等。
81.图4的(b)表示节点id、x坐标、y坐标来作为节点的详细信息。例如,节点a的坐标为(x,y)=(20,20)。
82.图4的(c)表示行驶道路id、行驶道路的两端的节点id来作为行驶道路的详细信
息。例如,节点a、b间的行驶道路id为1,行驶道路的两端的节点为a和b。节点间的距离(弧线的距离)也可以与行驶道路id相关联地包含于行驶道路构造信息。或者,也可以基于弧线两侧的节点的位置来计算该弧线的距离。
83.图5表示行驶道路构造信息的其他例子。图5的(a)是从图4的行驶道路构造信息省略一部分的节点、仅剩下了特定的节点的图。特定的节点是货物的堆积、装卸场所、待机场所等的指定区域或者其附近的节点。
84.图5的(b)表示各行驶道路的行驶道路id、行驶道路的两端的节点id、在各行驶道路上行驶所需要的标准时间。例如,节点b和c间的行驶道路的行驶道路id为1,行驶道路的两端的节点为b和c,在行驶道路上进行行驶所需要的标准时间为180。时间的单位可以为任何单位。
85.路径计划部109基于与预先决定的各移动体应该进行的作业的内容和作业的顺序有关的信息,生成指定了各移动体要通过的多个指定区域的通过顺序的路径计划,将所生成的路径计划的数据保存于路径计划存储部102。路径计划的生成方法可以是任意的,但作为一个例子,也可以将多个移动体在同一行驶道路上向相反方向行进的行驶距离少这一情况作为评价基准或者评价基准的一部分,生成各移动体的路径计划。路径计划也可以是外部的装置生成的计划或者用户生成的计划。在该情况下,路径计划部109取得该路径计划,并将其保存于路径计划存储部102。路径计划部109也可以经由通信部110从外部的装置接收路径计划的数据。路径计划部109也可以经由用户操作的输入装置来取得路径计划的数据。
86.路径计划存储部102在内部存储各移动体的路径计划的数据。
87.在图6的(a)中示出某移动体的路径计划的一个例子。在该例子中,移动体从图4的(a)的指定区域l出发,经过k、i、g、e、c、a去往指定区域b。接着,经过a、c、d、f、e、g、h、j、i、k去往指定区域m,再经过k、i、g、e、c、a去往指定区域b。另外,经过a、c、d、f、e、g、h、j、i、k返回指定区域l。在此,为了便于说明,使用节点id来表现指定区域。在节点对应于交叉部的情况下,使用了该节点id的指定区域也可以内部性地解释为表示与该节点所表示的交叉部连接的行驶道路端部(进入交叉部的跟前)。例如,接着指定区域l的指定区域k解释为是指即将进入节点k所表示的交叉部之前的行驶道路lk的端部。在此,行驶道路lk是指节点l与节点k之间的行驶道路。在以下的说明中,也使用节点id来表示指定区域,但在该情况下,也设为是与在此进行了的说明同样的含义。
88.上述例子的路径包括在指定区域中往复的环状的路径。该路径计划是关于一个移动体的路径计划,关于其他各移动体也准备了路径计划。此外,路径不需要是环状。各移动体也可以长时间地在不同的行驶道路上行驶。
89.在为将货物的搬送作为目的的移动体、在进行移动的同时进行各种作业的移动机器人等的情况下,也可以对在路径计划中进行作业的指定区域追加该作业的信息。
90.图6的(b)表示该情况下的路径计划的例子。在该例子中,插入了对在指定区域l和m进行从架子装载货物的装载作业这一情况进行指示的信息(load)、对在指定区域b进行卸下货物的作业这一情况进行指示的信息(unload)。在此,load表示装货作业,unload表示卸货作业。此外,从移动体来看,进行堆积等作业时的作业对象的架子等处于左方向、右方向、前方向、斜方向等哪个方向既可以是预先确定的,也可以是移动体通过传感器等自动进行
检测的。
91.状态存储部104在内部存储有表示各移动体的状态的信息和移动体的固有信息。
92.作为移动体的状态,包括移动体的位置信息、移动体搭载的电池的剩余电力、移动体是否保持有货物(移动体搬送货物的情况)、搬送中的货物的种类、数量等。位置信息包括移动体的当前位置(最近检测到的位置)和各移动体到此为止通过了的位置的历史记录信息。如后述的那样,表示移动体的状态的信息通过运行管理装置200的状态检测部202(后述)来取得。
93.作为移动体的固有信息,例如包括标准速度、最大速度、最低速度、移动体的尺寸、能够移动的方向等的移动体的规格信息。另外,包括与电池的剩余电力相应的标准速度的变化率(例如,剩余电力越少,标准速度越低)。另外,若是以货物的搬送为目的的移动体,则包括货物的装卸所需要的作业时间的信息(例如堆积或者装卸预定个数的货物所需要的时间)。在此所举出的信息不过是一个例子,也可以是其他信息。
94.行驶定时计划部105在不变更各移动体的路径计划的制约条件下,关于成为计划对象的多个移动体生成行驶计划(行驶定时计划)以使得不产生竞争(碰撞或者僵持)。行驶定时计划是关于多个移动体决定了对于各指定区域的移动体的出发、到达以及通过的定时的计划。行驶定时计划包括多个移动体出发、到达以及通过的多个指定区域和多个移动体到达各指定区域的时刻或者在各指定区域出发的时刻。行驶计划是多个移动体的各自的行驶计划(个别行驶计划)的集合。作为一个例子,个别行驶计划包括移动体出发、到达以及通过的多个指定区域和移动体到达各指定区域的时刻或者在各指定区域出发的时刻。行驶定时计划也可以包括各移动体在指定区域逗留的时间、各移动体在指定区域间移动的时间等的信息。
95.作为一个例子,成为生成行驶定时计划的对象的移动体是通过运行管理装置200进行运行管理的全部移动体。行驶定时计划部105为了生成行驶定时计划,使用多个移动体的路径计划和多个移动体的信息(表示状态的信息和固有信息)。
96.行驶定时计划部105在生成初始计划时、或者在决定了通过再次计划判定部108进行再次计划的情况下,生成行驶定时计划。对如后述那样对移动体决定的更新位置以后的路径部分进行行驶定时计划的更新。
97.图7表示通过行驶定时计划部105生成的行驶定时计划的一个例子。示出对于3个移动体(agv0、agv1、agv2)的行驶定时计划的例子。行驶定时计划包括agv0的个别行驶计划、agv1的个别行驶计划、agv2的个别行驶计划。
[0098]“move”是对移动进行指示的命令(移动命令),具有移动时间来作为自变量。例如,在agv0的行驶定时计划中,move-k-i-37.0表示从指定区域k(与节点k表示的交叉部连接的行驶道路lk的端部)向指定区域i(与节点i表示的交叉部连接的行驶道路ki的端部)移动37单位时间。37单位时间是作为自变量所指定的移动时间。
[0099]“wait”是对待机在移动目的地的指定区域(节点的跟前)进行指示的命令(待机命令)。例如连续有move-i-g-10.0、wait-52.0这一命令的情况表示在从指定区域i移动到了指定区域g时,在指定区域g(节点g的跟前)待机52单位时间。因此,在该情况下,move-i-g-10.0表示用10单位时间移动到指定区域g,在那里待机52单位时间后,按照接下来的命令进行移动(进入节点g表示的交叉部,进一步进入接下来的行驶道路)。待机场所也可以
不是指定区域。待机场所为离开了交叉部的位置即可。
[0100]
在本例子中,移动体agv0的路径计划指定如下路径:从图4的(a)的指定区域l出发,经过其他指定区域去往指定区域b,接着,经过其他指定区域去往m,再经过其他指定区域去往b,另外,经过其他指定区域返回l。
[0101]
移动体agv1的路径计划指定反复进行两次如下的行驶路径:从图4(a)的指定区域b出发经过其他指定区域去往指定区域m,再次经过其指定区域返回指定区域b。
[0102]
移动体agv2的路径计划指定如下路径:从图4的(a)的指定区域k出发,经过其他指定区域去往指定区域b,经过包括指定区域l的其他指定区域再次去往b,经过其他指定区域返回指定区域k。
[0103]
行驶定时计划部105通过在被提供了这些agv0、agv1、agv2的路径计划(参照图6)的条件下执行后述的搜索算法,生成包括图7所示的agv0、agv1、agv2的个别行驶计划的行驶定时计划。行驶定时计划例如包括使移动体待机在交叉部的跟前直到其他移动体通过为止等的时间调整,由此对agv0、agv1以及agv2的各指定场所的到达时刻或者出发时刻等进行调整。由此,阻止产生竞争(碰撞或者僵持等)。
[0104]
行驶定时计划部105也可以假定为:在根据以move命令算出作为自变量所指定的移动时间时,移动体以其标准速度移动图4的行驶道路构造信息中的各行驶道路的距离。也可以对移动体的速度根据行驶道路的曲率或者倾斜等而从标准速度进行变化的情况进行考虑,如图5的行驶道路构造信息那样对行驶道路预先提供标准时间。在该情况下,移动体也可以自主地在最大速度与最低速度之间对移动速度进行控制以使得能够以标准时间进行移动。另外,有时也可能提供与电池的剩余电力相应的标准速度的变化率等来对标准速度进行修正。另外,若是以货物的搬送为目的的移动体,则也可以在货物搬送期间将标准速度修正为快的值或者慢的值。另外,也可以根据行驶实际数据,对在各行驶道路上行驶的标准时间进行修正。这样,行驶定时计划部105算出移动时间以使得满足与速度有关的条件。
[0105]
行驶定时计划部105对于以货物的搬送为目的的移动体、进行包括货物的装卸等的各种作业的移动机器人,也反映货物的装卸等所需要的作业时间的信息等来生成行驶定时计划。也可以如前述的路径计划(参照图6的(b))那样,指定在指定区域进行的作业内容。另外,也可以根据指定区域和移动体的种类的组,预先决定移动体在指定区域中进行的作业内容。
[0106]
图7所示的行驶定时计划的例子假定为:在指定区域m和l中,货物的装载需要40单位时间,在指定区域b中,卸下货物需要130单位时间。对于货物的装载和装卸的作业时间,预先被提供了与货物的种类、个数或者移动体的种类相应的值。该值既可以保存于状态存储部104,也可以由路径计划赋予。另外,也可以根据行驶实际数据来对作业时间进行修正。也可以将对移动体指示作业的实施的命令与进行该作业的场所的指定区域相关联。对移动体进行指示的命令也可以预先嵌入在使移动体执行的程序代码的内部。
[0107]
图7所示的行驶定时计划的格式为排列了移动体的命令的形式,但这不过是一个例子。行驶定时计划的格式不被特别地限定。对于各移动体的路径计划的一部分指定区域、或者全部指定区域,以能够确定移动体应该到达的时刻和应该出发的时刻的形式加以包含即可。
[0108]
行驶定时计划部105基于行驶定时计划和各移动体的路径计划,生成各移动体的
运行计划。各移动体的运行计划是对移动体的路径计划的一部分或者全部的指定区域设定了确定该移动体应该到达的时刻和应该出发的时刻的信息的运行计划。
[0109]
运行计划存储部103在内部存储各移动体的运行计划。
[0110]
在图8中示出图7的移动体(agv0)的运行计划的一部分。对图6的路径计划赋予了图7的agv0的时刻信息。agv0在时刻0从指定区域l出发,在时刻70到达指定区域k,不停止而直接出发(即在时刻70通过指定区域k),在时刻107通过指定区域i,在时刻117到达指定区域g,在那里待机52单位时间,在时刻169出发。图8所示的运行计划的格式不过是一个例子,格式不被特别地限定。例如,运行计划也可以是仅将行驶定时计划的agv0的计划部分(agv0的个别行驶计划)与agv0的路径计划关联的运行计划。
[0111]
指令部(控制部)107经由通信部110向运行管理装置200发送基于行驶定时计划的各移动体的移动指令数据。运行管理装置200经由通信部201从运行计划装置100的通信部110接收各移动体的移动指令数据。运行管理装置200经由通信部201向各移动体发送各移动体的运行指令数据。这样,指令部107通过发送各移动体的移动指令数据,对各移动体的行驶进行控制。
[0112]
作为移动指令数据的形态的第1例,具有对能够确定对于各移动体的路径计划上的一部分或者全部的指定区域的到达时刻和出发时刻的信息进行指示的形态。例如,在图7的行驶定时计划的情况下,计划本身是命令的列,因此,也可以将其直接用作移动指令数据。或者,也可以在生成具有与图7不同的格式的行驶定时计划的情况下,根据行驶定时计划生成各移动体能够解释的命令串,将该命令串作为移动指令数据发送给各移动体。
[0113]
作为移动指令数据的形态的第2例,也具有对移动体指示各行驶道路的移动时间和各指定区域的待机时间的形态。
[0114]
在上述两个例子中的任一个例子的情况下,各移动体都按照移动指令数据来自身对行驶进行控制。运行管理装置200也可以逐次地反复进行向各移动体发送对各移动体指示在待机中的指定区域出发的命令和指定接着为了待机而应该停止的指定区域的命令。在该情况下,各移动体反复进行逐次地从运行管理装置200接收以及执行命令来作为移动指令数据。
[0115]
作为移动指令数据的形态的第3例,也可以根据行驶定时计划确定多个移动体在路径计划上通过的交叉部,对多个移动体指示多个移动体在交叉部通过的顺序。在该情况下,也可以将交叉部作为指定区域,对多个移动体指示通过指定区域的顺序。通过使多个移动体严格遵守通过顺序,即使是由行驶定时计划指定的到达时刻和现实的到达时刻在前后上错开了,也能够防止移动体彼此发生碰撞或者僵持等的竞争。此外,能够基于行驶定时计划来算出多个移动体对于指定区域的通过顺序。
[0116]
以下示出如下命令的例子,该命令为:基于图7中的行驶定时计划,对agv0、agv1、agv2指示通过(到达)设定在节点k的交叉部的指定区域(记载为指定区域ka)的顺序和时刻(经过时间)。
[0117]
agv2 0
[0118]
agv0 70
[0119]
agv1 205
[0120]
agv1 453
[0121]
agv2 593
[0122]
agv2 773
[0123]
agv0 920
[0124]
agv0 1168
[0125]
agv1 1218
[0126]
agv1 1466
[0127]
agv2 1606
[0128]
agv0 1925
[0129]
agv2最先(时刻0的时间点)通过指定区域ka,agv0接着在时刻70的时间点通过,那之后,agv1在时刻205的时间点通过。以后同样地进行解释。
[0130]
作为对指定区域的通过顺序进行控制的方法,具有运行管理装置200对移动命令的执行进行管理的方法。运行管理装置200对移动指令数据的执行(命令的执行)进行管理。例如,运行管理装置200在估计为了agv0会先到达需要agv2先通过的指定区域的情况下,使agv0待机在该指定区域的跟前或者远离了指定区域的位置,直到agv2通过。或者,进行agv0的速度调整,使指定区域中的agv0的到达时刻(通过时刻)推迟。通过向移动体发送待机命令、速度调整命令(例如减速命令)来进行这样的控制。
[0131]
作为控制方法的其他例子,运行管理装置200经由状态检测部202检测以及存储最后通过了指定区域的移动体的识别信息(id),向其他移动体发送该id。其他移动体基于从运行管理装置200接收的id,检查应该先于自身移动体通过的移动体是否通过了指定区域。例如,在上述的命令例子中的
[0132]
agv0 70
[0133]
agv1 205
[0134]
agv1 453
[0135]
的情况下,agv1首先基于从运行管理装置200接收的id,确认在通过指定区域ka之前、agv0是否已先通过。agv1在确认到agv0已先通过之后,通过指定区域k。然后,在确认到了不久之前(最后)通过了指定区域ka的是自身移动体之后,agv0再次通过指定区域ka。
[0136]
再次计划判定部108对存储于运行计划存储部103的运行计划和通过状态检测部202检测到的移动体的状态进行比较,判定是否应该进行再次计划。再次计划意味着运行计划的更新、即路径计划和行驶定时计划中的至少后者的更新。行驶定时计划的更新意味着对多个移动体的个别行驶计划中的至少一个进行更新。再次计划判定部108在关于至少1台移动体判断为无法遵守运行计划的情况下,使得产生再次计划触发。另外,在由于新产生应该进行作业、搬送的货物等外部原因而需要进行再次计划的情况下,也使得再次计划触发。对于再次计划,作为一个例子,成为计划对象的全部移动体成为对象。作为再次计划的结果,可能也存在个别行驶计划不被变更的移动体。以下,将无法遵守运行计划的例子表示为第1例和第2例。
[0137]
(第1例)对在行驶定时计划中各移动体到达指定区域的时刻(预定到达时刻)或者出发的时刻(预定出发时刻)和各移动体的状态(移动体的当前位置、移动体最后通过或者出发的指定区域等)进行比较。并且,在确定了移动体无法在预定到达时刻之前到达、或者移动体相对于预定到达时刻产生阈值时间以上的到达的晚点的时间点,使得产生再次计划
触发。也可以在进行该判断时,进行移动体以最大可能速度在行驶道路上进行移动或者以标准速度进行移动等的各种假定。
[0138]
作为(第2例),对各移动体通过行驶定时计划中的指定区域的顺序和各移动体的当前位置或者最后通过或出发的指定区域进行比较。并且,对通过顺序被决定了的指定区域确定了应该先行的移动体比预定到达时刻晚点阈值时间以上的时间点,使得产生再次计划触发。例如,在应该先行的移动体即使在行驶道路中以能够行驶的最大速度进行移动,也赶不上预定到达时刻的情况下,判断为确定了晚点阈值时间以上。
[0139]
更新位置决定部106在决定了通过再次计划判定部108进行再次计划的情况下,对各移动体决定应该更新运行计划的定时。在本实施方式中,根据移动体到达了更新位置的定时,对移动体的运行计划进行更新。因此,更新位置决定部106决定各移动体的更新位置。移动体以更新前的运行计划(更新前的行驶定时计划)进行运行,直到到达更新位置,在到达了更新位置之后,按照更新后的运行计划(更新后的行驶定时计划)进行动作。对运行计划进行更新的定时不限定于由更新位置确定的例子,例如也可以由时刻来指定。
[0140]
作为更新位置的例子,在各移动体能够与运行管理装置200实时地进行通信的情况下,可以是任意的位置(例如考虑移动体的当前位置或者运算所需要的时间,为在当前位置移动了一定的余裕时间的期间后的位置等)。
[0141]
在移动体仅能够经由配置在指定区域或者其附近的通信装置501与运行管理装置200进行通信的情况下,将指定区域或者其附近的位置作为更新位置。通信装置501也可以不是配置在指定区域或者其附近,而是通信装置501配置在行驶道路的途中。只要是能够与通信装置501进行通信的范围,则更新位置也可以为任何位置。在当移动体在行驶的途中停止时具有妨碍其他移动体的行驶的可能性(例如与从后方来到的移动体碰撞的可能性)等的情况下,也可以将移动体当前驶向的指定区域或者其跟前作为更新位置。
[0142]
路径计划部109在决定了通过再次计划判定部108进行再次计划的情况下,对各移动体生成将各移动体的更新位置作为了起点的路径计划。
[0143]
作为一个例子,在当前的路径计划中将更新位置以后的路径部分的计划直接作为更新后的路径计划。即,将移动体的路径计划所示的路径中的、尚未移动的路径的计划部分作为更新后的路径计划。例如,在当前的路径计划为图6的(a)的路径计划的情况下,设为移动体的当前位置是指定区域e(节点e表示的交叉部的跟前),接下来的移动目的地是节点c(节点c表示的交叉部的跟前)。在该情况下,对于移动体尚未移动的路径的计划部分(更新后的路径计划),除去图6的(a)的最初的4个节点l、k、i、g而成为如以下那样。
[0144]
(更新后的路径计划)
[0145]
e、c、a、b、a、c、d、f、e、g、h、j、i、k、m、k、i、g、e、c、a、b、a、c、d、f、e、g、h、j、i、k、l、k、i、g、e、
[0146]
或者,作为其他例子,路径计划部109也可以在决定了通过再次计划判定部108进行再次计划的情况下,将多个移动体同时向相反方向行进的行驶道路(行驶区间)的合计距离少这一情况作为评价基准或者评价基准一部分,生成各移动体的路径计划。
[0147]
或者,也可以在根据移动体的当前位置和移动体应该进行的作业内容预先提供了多个能够利用的路径计划的选项的情况下,基于移动体的更新位置和剩余的作业内容,从多个选项中选择路径计划。另外,也可以通过预先提供的算法生成新的路径计划。对路径计
划进行更新的方法不被特别地限定,也可以使用已有的路径计划方法。
[0148]
行驶定时计划部105基于更新后的路径计划,再次生成(更新)行驶定时计划。行驶定时计划部105生成定时被部分地更新、消除了计划的时间早的一部分的竞争的多个临时行驶计划(临时行驶定时计划)。关于各临时行驶定时计划,使用评价值算出部114来取得基于多个移动体的晚点时间的评价值。基于所取得的评价值来选择临时行驶定时计划,实施如下的搜索处理:反复进行生成对所选择的临时行驶定时计划的消除了竞争的范围以后进行变更而得到的新的临时行驶定时计划。作为一个例子,评价值算出部114将以多个移动体对在行驶定时计划的更新完成部分所产生的晚点时间和在基于临时行驶定时计划的行驶定时计划的更新以后所产生的晚点时间的预测值的合计进行求总和而得到的值作为评价值。在该情况下,作为一个例子,选择评价值最小或者为阈值以下的临时行驶定时。
[0149]
评价值的算出例是一个例子,不限定于该方法。
[0150]
对于晚点时间的预测值,例如既可以假定为忽略移动体间的竞争而进行了行驶,视为根据行驶距离而以一定的权重产生延迟来计算延迟时间,也可以考虑路径的坡度等来计算延迟时间。也可以代替总和,使用幂和。行驶定时计划部105按照搜索后的临时行驶定时计划,对行驶定时计划进行更新。
[0151]
作为算出评价值的方法,评价值算出部114关于临时行驶定时计划的消除了竞争的范围内,根据计划计算评价值(例如晚点时间)。具有关于那以后的范围通过预先定义的评价函数来进行算出的方法、和通过模型生成部113使用根据数据生成的模型来根据临时行驶定时计划中的多个移动体的状态特征量来算出(即预测)评价值的方法。对于各自的详细内容,将在后面进行描述。
[0152]
行驶定时计划部105在上述的搜索处理中,对各临时行驶定时计划取得作为生成模型所需要的数据的搜索日志,将所取得的搜索日志保存于搜索日志存储部111。搜索日志是包括各临时行驶定时计划中的多个移动体的状态特征量、和临时行驶定时计划中的消除了上述竞争的范围以后的部分的评价值的实际值的数据(第1数据)。
[0153]
图9表示搜索日志的一个例子。一行对应于一个搜索日志。搜索日志包括移动体1~4的当前位置和剩余行驶距离来作为多个移动体的状态特征量。移动体的状态特征量是表示移动体的行驶状态的特征量。
[0154]
移动体1~4不需要是特定id的移动体,id和移动体在相同的行驶定时计划中相关联即可,若过去的其他行驶定时计划中其他4台移动体为行驶定时计划的对象,则该4台移动体分别对应于移动体1~4。
[0155]
移动体的状态特征量也可以包括与货物有关的信息。作为与货物有关的信息,例如具有移动体保持的货物的有无、数量、搬送未结束的货物的总数等。
[0156]
当前位置既可以是移动体所位于的坐标,也可以是移动体所位于的指定区域的id,又可以是移动体所位于的行驶道路的id。另外,当前位置也可以是将移动体行驶道路网络分割为了多个区域时的区域的识别信息。关于区域的识别信息,使用图10进行说明。
[0157]
图10表示将与图2同样的行驶道路网络分割为区域1~4的4个区域的例子。图9的区域1~4对应于图10的区域1~4。
[0158]
剩余行驶距离是路径计划中的从当前位置(关于临时行驶定时计划中的消除了竞争的范围,各移动体进行了行驶后的预定位置)起的剩余的行驶距离。
[0159]
另外,搜索日志包括所算出的评价值和搜索深度。在搜索处理中,进行从初始状态(更新前的行驶定时计划)进行了按照计划的各移动体的行驶的情况下的移动体彼此的竞争的检测、每当检测到竞争时消除竞争的临时行驶定时计划的制作、以及所制作的临时行驶定时的移动体彼此的竞争的检测。并且,以后反复进行消除竞争的临时行驶定时计划的制作、和所制作的临时行驶定时计划的移动体彼此的竞争的检测(搜索处理)。
[0160]
能得到从初始状态起在深度方向上根据临时行驶定时计划的制作而状态产生分支的搜索树。搜索的深度相当于从搜索树的初始状态起的搜索的深度(阶层)(参照后述的图15),具体而言,相当于进行了竞争消除的次数。
[0161]
搜索日志中的评价值记录完成了搜索之后所确定的在搜索中预测到的部分的实际值。例如,计算从完成后的行驶定时计划的各途中状态下的移动体的当前位置(关于临时行驶定时计划中的消除了竞争的范围,各移动体进行了行驶之后的预定位置)行驶到行驶定时计划的最后的晚点时间(消除竞争的时间调整的合计),使用在多个移动体间求总和而得到的值。
[0162]
在搜索进行到了最后的情况下,搜索日志的剩余行驶距离成为零。有时由于时间限制等而搜索也会在途中结束。此外,也可以在搜索日志存储部111也储存有在过去执行了的多个行驶定时计划下所取得的搜索日志。
[0163]
作为搜索处理的结果,选择评价最高的临时行驶定时计划。根据评价值的定义,有时评价值的值越大、评价越高,有时评价值的值越小、评价越高。在图10的例子中为评价值的值越小、评价越高,但也可以将评价值定义为评价值的值越大、评价越高。在进行了运算的期间内,选择评价最高的临时行驶定时计划。也可以在存在多个评价值最小的临时行驶定时计划时,选择搜索的深度最浅的临时行驶定时计划。搜索的深度越浅,消除竞争的次数越少。另外,也可以基于评价值和搜索深度这两方,选择临时行驶定时计划。
[0164]
搜索日志存储部111在通过行驶定时计划部105进行的搜索处理结束时或者与搜索处理并行地,将搜索树的途中的各状态所对应的各临时行驶定时的评价值与各状态下的多个移动体的状态特征量和各状态的搜索深度相关联地进行存储。
[0165]
模型生成部113基于存储于搜索日志存储部111的多个移动体的状态特征量和评价值的组的数据,生成或者更新将多个移动体的状态特征量和评价值相关联的模型。模型是将多个移动体的状态特征量作为输入、输出评价值的函数或者程序等。
[0166]
例如,模型也可以是从搜索日志存储部111检索与所提供的多个移动体的状态特征量类似的搜索日志、输出所找到的搜索日志包含的评价值的模型。该方法被称为邻域法。作为输入,不仅可以是多个移动体的状态特征量,也可以提供搜索深度。另外,作为其他的模型例,也可以是所谓的神经网络模型或者决策树等的通过机器学习生成的模型。例如若模型为神经网络,则生成或者更新神经网络的参数。
[0167]
评价值算出部114基于通过模型生成部113生成的模型,根据从行驶定时计划部105提供的多个移动体的状态特征量,算出(预测)评价值。由此,行驶定时计划部105能够高精度地取得在搜索处理中相继生成的临时行驶定时计划的评价值。
[0168]
行驶定时计划部105基于通过所选择的临时行驶定时计划进行了更新的行驶定时计划,取得各指定区域的时刻信息,将所取得的各指定区域的时刻信息赋予给更新后的路径计划。由此,再次生成各移动体的运行计划。行驶定时计划部105根据所再次生成的运行
计划来对运行计划存储部103进行更新。
[0169]
指令部(控制部)107基于被更新后的行驶定时计划,生成各移动体的移动指令数据,向运行管理装置200发送各移动体的移动指令数据。运行管理装置200在各移动体存在于更新位置时,向各移动体发送移动指令数据。
[0170]
运行管理装置200按照从运行计划装置100接收到的各移动体的移动指令数据,进行用于使各移动体行驶的执行管理和各移动体的状态的管理。
[0171]
运行管理装置200的通信部201与移动体301_1~301_n以及运行计划装置100进行通信。通信既可以是无线,也可以是有线。
[0172]
运行管理装置200的状态检测部202使用通信装置501或者传感器401,取得表示移动体的状态的信息。状态检测部202也可以使用通信部201,取得表示移动体的状态的信息。状态检测部202经由通信部201向运行计划装置100发送表示各移动体的状态的信息。表示各移动体的状态的信息也可以包括检测到各移动体的状态的时刻。
[0173]
传感器401是用于对移动体的状态进行检测的传感器。通信装置501是以比通信部201近的距离与移动体进行无线通信的装置。传感器401和通信装置501例如配置在移动体有可能在行驶道路中暂时停止的特定场所。作为一个例子,该特定场所是指定区域或者其附近。
[0174]
作为一个例子,传感器401是接近传感器、压力传感器或者光电传感器等的路侧传感器。传感器401对特定场所中的移动体的到达、通过、方向、有无搭载货物等进行检测。传感器401也可以是设置在设施的天棚的摄像头。在该情况下,通过摄像头以从天棚俯瞰的方式对设施内进行拍摄。通信装置501例如是近场无线通信、红外线通信等以比较近的距离进行通信的装置。通信装置501能够与存在于通信范围内的移动体进行无线通信。
[0175]
传感器401向状态检测部202发送表示从移动体检测到的信息的信号。通信装置501向状态检测部202发送从移动体接收到的信息。
[0176]
状态检测部202基于从传感器401或者通信装置501接收到的信息,确定移动体的状态。在传感器401为摄像头的情况下,状态检测部202基于所拍摄到的图像,确定各移动体的位置。通过使用传感器401或者通信装置501,即使是在移动体存在于无法与通信部201进行通信的场所时,也能够检测移动体的状态。
[0177]
移动体的状态的例子包括各移动体的位置(当前位置)、各移动体通过了指定区域的时刻、各移动体的行进方向、各移动体是否保持有货物(各移动体搬送货物的情况)等。
[0178]
在移动体具有以自身装置进行自我位置推定的功能的情况下,状态检测部202也可以经由通信部201或者通信装置501取得该移动体所推定的位置信息。作为自我位置推定的例子,具有使用航位推算(dead reckoning)、slam、gps等的手段的方式。
[0179]
另外,也可以在移动体有可能通过的场所设置无线标签或者条形码等的位置检测用的标记。作为一个例子,场所是指定区域或者其附近。在该情况下,通过移动体对标记进行检测,移动体自身能够检测对于场所的到达或者通过。移动体将所检测到的信息经由通信部201或者通信装置501发送给运行管理装置200。
[0180]
各移动体301从运行管理装置200接收移动指令数据,按照移动指令数据,在行驶道路上进行自动行驶。作为自动行驶的手段,例如如前述的图2所示那样,具有预先在楼层贴上导带、移动体沿着导带进行行驶的方式。作为其他手段,具有反复进行在根据标记来对
位置进行修正的同时通过航位推算行驶一定距离、移动体使用slam(simultaneous localization and mapping,同步定位与建图)等来在指定区域间中进行自主行驶的方式。也可以是在此所描述的以外的手段。
[0181]
图11是运行计划系统1的整体动作的流程图。设为预先提供各移动体的路径计划,通过行驶定时计划部105生成行驶定时计划,生成对路径计划赋予了该行驶定时计划的时刻信息的运行计划。各移动体设为根据基于行驶定时计划的移动指令数据来进行运行。此外,关于运行计划系统1的动作开始时(尚未制作行驶定时计划,各移动体停止在初始位置)的动作,适当追加补充说明。
[0182]
在图11所示的处理中,行驶定时计划部105每当进行行驶定时计划的更新时,使用追加于搜索日志存储部111的搜索日志来进行模型的生成或者更新。在本例子中设为评价值的值越大、评价越高。例如,将前述的晚点时间的总和的倒数作为评价值。
[0183]
运行管理装置200的状态检测部202对各移动体的位置和行进方向进行检测(步骤11)。此外,在运行计划系统1的动作开始时的情况下,检测各移动体的初始位置和朝向即可。此外,在为能够在那里旋转、全方向移动的移动体的情况下,可能有时也不进行行进方向的检测。
[0184]
更新位置决定部106基于各移动体的当前的运行计划,按各移动体决定对各移动体的运行计划进行更新的更新位置(步骤12)。此外,在运行计划系统1的动作开始时的情况下,尚未生成各移动体的运行计划,因此,更新位置设为各移动体的初始位置即可。
[0185]
路径计划部109关于各移动体生成将更新位置作为起点的路径计划,或者选择、提取预先准备的的路径计划的一部分。通过所生成或者选择、提取的路径计划,对前次的路径计划进行更新(步骤13)。此外,在运行计划系统1的动作开始时的情况下,生成将各移动体的初始位置作为了起点的路径计划、或者从外部取得路径计划即可。
[0186]
在关于全部移动体未生成路径计划的情况下(步骤14:是),结束本流程图的处理。例如,在没有应该输送的货物或者没有应该进行的作业等的情况下,关于该移动体不生成路径计划。在判断为行驶定时计划的更新来不及(例如估计当前的全部移动体的运行会在更新行驶道路定时计划之前完成)、或者无法生成路径计划的情况下,也可以结束本处理。
[0187]
在关于至少1台移动体更新(再次生成)了路径计划的情况下(步骤14:否),行驶定时计划部105通过基于该移动体的更新后的路径计划来进行搜索处理,生成或者更新行驶定时计划(步骤15)。在行驶定时计划的生成或者更新处理完成后,基于搜索处理的结果,在搜索日志存储部111中追加如下搜索日志,该搜索日志将在搜索中所预测到的部分的评价值的实际值(例如晚点时间)与多个移动体的状态特征量以及搜索深度相关联(步骤21)。在生成后述的模型之前,使用预先定义的评价函数来算出评价值。行驶定时计划部105对路径计划赋予行驶定时计划所示的时刻信息来生成运行计划。此外,关于未生成路径计划的移动体(例如完成了运行的移动体),排除在行驶定时计划的对象之外即可。
[0188]
模型生成部113基于存储于搜索日志存储部111的搜索日志,生成或者更新模型(步骤21)。在模型存储部112中尚未存在模型时生成模型,在已经存在时对模型进行更新。使用模型和搜索日志,算出模型的精度。例如将搜索日志的多个移动体的状态特征量作为输入,通过模型算出(预测)评价值。算出所预测到的评价值与搜索日志所包含的评价值的差分。若差分的平均值为阈值以上,则判断为模型的精度高,若小于阈值,则判断为精度低。
在判断为精度高的情况下,在下次以后的步骤15中,不通过预先定义的评价函数进行评价值的算出,而是使用模型来算出(预测)评价值。在该情况下,省略步骤21。
[0189]
此外,也可以在生成了模型之后,也定期地在步骤15中通过预先定义的评价函数进行评价值的算出,在步骤21中将搜索日志追加到搜索日志存储部111,进行模型的更新。
[0190]
指令部107基于各移动体的行驶定时计划,生成对于各移动体的移动指令数据(步骤16),向运行管理装置200发送各移动体的移动指令数据。
[0191]
运行管理装置200使用通信部201,向各移动体发送移动指令数据(步骤17)。
[0192]
运行管理装置200的状态检测部202经由通信部201、传感器401以及通信装置501中的至少一个,实时地监视各移动体的状态(步骤18)。状态检测部202经由通信部201将表示各移动体的状态的信息发送给再次计划判定部108(该步骤18)。
[0193]
再次计划判定部108基于各移动体的运行计划和各移动体的状态,判断是否至少存在一个无法遵守运行计划(或者行驶定时计划)的移动体(步骤19)。或者,再次计划判定部108对是否由于产生新的作业等的外部原因而成为了需要再次计划进行判断(步骤19)。再次计划判定部108在决定为进行再次计划的情况下,使得产生再次计划触发(步骤19:是)。
[0194]
在产生了再次计划触发的情况下(步骤19:是),返回到步骤11。并且,对于全部移动体(除去计划的执行已经结束的移动体)的路径计划和行驶定时计划进行更新(步骤11~步骤15)。并且,向各移动体再次发送基于被更新后的行驶定时计划的移动指令数据。此外,各移动体通过所接收到的移动指令数据,对前次接收到的移动指令数据进行更新。
[0195]
在未产生再次计划触发的情况下(步骤19:否),判断是否存在运行计划(或者行驶定时计划)已结束的移动体。在存在运行计划已结束的移动体时(步骤20:是),返回到步骤11。在不存在运行计划已结束的移动体的情况下(步骤20:否),返回到步骤18。反复进行步骤18~步骤20,直到产生再次计划触发,或者直到产生运行计划已结束的移动体。
[0196]
使用图12、图13以及图14,对图11的步骤15的详细情况进行说明。在本步骤中,生成如下的行驶定时计划,该行驶定时计划即使是存在多台在各路径计划中在同一行驶道路上向相反方向行驶和/或速度不同的移动体的情况下,也保障使得移动体彼此不产生碰撞或者僵持。在行驶定时计划的生成中,将不改变各移动体的路径计划作为前提条件。
[0197]
图12是通过行驶定时计划部105进行的处理的一个例子的流程图。在本例子中设为评价值的值越大、评价越高。例如将前述的晚点时间的总和的倒数作为评价值。
[0198]
行驶定时计划部105从行驶道路构造存储部101取得行驶道路构造信息(参照图4或者图5),从路径计划存储部102取得路径计划的数据(步骤21)。
[0199]
作为一个例子,行驶定时计划部105基于行驶道路构造信息和各移动体的路径计划,生成确定了各移动体到达指定区域的时刻或者在指定区域出发的时刻中的至少一方的个别行驶计划(步骤22)。将这些移动体的初始状态的个别行驶计划一并称为初始状态的行驶定时计划。作为初始状态的行驶定时计划的生成方法,通过任意的方法对各移动体设定与路径计划中的指定区域的到达时刻和出发时刻中的至少一方有关的信息。例如,基于移动体的标准速度和作业的所需时间,算出对于各指定区域的到达或者出发的时刻,设定所算出的时刻的信息。在具有与移动体在各行驶道路中行驶的速度有关的条件(例如速度模式)的情况下使得满足与该速度有关的条件。或者,也可以直接挪用前次生成的行驶定时计
划的一部分(更新位置以后的部分)。
[0200]
行驶定时计划部105基于初始状态的行驶定时计划,检测在时间方向上最先产生竞争的2个移动体的对和产生竞争的弧线(行驶道路)(检测处理)(步骤23)。作为一个例子,在初始状态的行驶定时计划中,关于两个个别行驶计划的全部组合分别确定最先产生竞争的时刻。在所确定的时刻中选择在时间上最早的时刻,对在所选择的时刻产生竞争的两个移动体的对和产生该竞争的弧线(行驶道路)进行检测。
[0201]
图13的(a)是用于对在2台移动体(设为移动体1、移动体2)在简单的构造的行驶道路网络上行驶的情况下产生竞争的例子进行说明的图。在此,设为由移动体1的路径计划和移动体2的路径计划决定了:移动体1在节点c与节点e之间往复移动,移动体2在节点f与节点d之间往复移动。
[0202]
在节点ab间的行驶道路(区间ab)中,移动体1和移动体2产生相互相反方向的行驶。当就这样进行行驶时,在移动体1和移动体2在行驶道路上无法进行后退行驶的情况下,会产生僵持。即使移动体1和移动体2中的至少一方能够进行后退行驶,也会产生由用于躲避碰撞的停止和后退行驶导致的大幅度的效率降低。
[0203]
图13的(b)表示基于移动体1和移动体2的初始状态的行驶定时计划来沿着时间表示了移动体1和移动体2的移动轨迹的图解。虚线的图解为移动体1的图解,实线的图解为移动体2的图解。通过按各行驶道路(区间)检查移动轨迹的交叉,能够检查有无产生竞争。在该例子中,在区间ab间,移动体1和移动体2的移动轨迹在点801交叉。因此,能够检测出在区间ab中移动体1和移动体2产生竞争。
[0204]
图14的(a)是用于对在2台移动体(设为移动体1、移动体2)进行行驶的情况下产生竞争(碰撞)的其他例子进行说明的图。在此,设为由移动体1的路径计划和移动体2的路径计划决定了:移动体1预定在节点e与节点c之间进行往复移动,移动体2预定在节点f与节点d之间进行往复移动。
[0205]
移动体1和移动体2在区间ab中向相同的方向行驶。由于是无法在区间ab间进行超车的行驶道路构造,因此,在移动体1和移动体2的移动速度不同的情况下,可能在区间ab中产生追尾或者暂时停止。反复进行防止追尾的暂时停止和再次行驶,行驶效率会变差。
[0206]
图14的(b)表示基于移动体1和移动体2的行驶定时计划(初始状态)来沿着时间表示了移动体1和移动体2的移动轨迹的图解。虚线的图解为移动体1的图解,实线的图解为移动体2的图解。移动体2比移动体1后出发,移动体2速度比移动体1的速度高,移动体2从后方与移动体1碰撞。移动体1和移动体2的移动轨迹在点802交叉,在与点802对应的位置碰撞。这样,能够检测出在区间ab中移动体1和移动体2产生竞争。
[0207]
在步骤23中能够检测到产生竞争的移动体对的情况下(步骤24:否),对于产生竞争的弧线(竞争弧线),决定避免竞争的多个对策或者至少一个对策。例如,通过进行使移动体对中的某一移动体待机在该竞争弧线的上游侧的弧线(行驶道路)或者指定区域的操作,能够避免相应的竞争。在该情况下,可以说具有两个对策。由此,关于各对策,至少对产生竞争的2个移动体的个别行驶计划中的至少一方进行变更。生成两个移动体中的至少一方的个别行驶计划被变更后的多个移动体的个别行驶计划的集合来作为临时行驶定时计划(更新处理)(步骤25)。此外,也可以将被变更后的个别行驶计划称为临时个别行驶计划。
[0208]
例如在设为存在多个移动体1~h(h为2以上的整数)、移动体2与移动体1竞争的情
况下,具有使移动体1进行待机的对策、使移动体2进行待机的对策这两个对策。在该情况下,按各对策对移动体1~h的个别行驶计划中的至少移动体1和2的至少一方的个别行驶计划进行变更。生成临时行驶定时计划,该临时行驶定时计划包括移动体1和2中的至少一方的个别行驶计划被变更后的移动体1~h的个别行驶计划。由此,按各对策,生成临时行驶定时计划。也即是,从一个行驶定时计划(或者临时行驶定时计划)得到两个临时行驶定时计划。
[0209]
将临时行驶定时计划称为“变更状态的行驶定时计划”。将本流程图的处理开始时的行驶定时计划称为“初始状态的行驶定时计划”。
[0210]
在图13的(c)中表示步骤25中的避免竞争的操作例。图13的(c)表示如下例子:为了避免在图13的(b)中检测到的点801处的竞争,通过移动体1在作为弧线(行驶道路)ab的上游的弧线ca进行待机或者速度调整(减慢)来避免竞争。作为避免在图13的(b)中检测到的竞争的其他方法,也可以是移动体2在作为行驶道路ba的上游的行驶道路fb进行待机或者进行速度调整(减慢)。通过这样进行避免竞争的操作,在行驶道路ab中,移动体1和移动体2的移动轨迹不交叉。由此,能避免竞争。
[0211]
在图14的(c)和图14的(d)中表示步骤25中的避免竞争的其他操作例。图14的(c)表示如下例子:为了避免在图14的(b)中检测到的点802处的竞争,通过移动体1待机在作为行驶道路ba的上游的行驶道路eb来避免竞争。同样地,图14的(d)表示通过移动体2待机在作为ba的上游的行驶道路fb来避免竞争的例子。
[0212]
行驶定时计划部105使用评价值算出部114来对各临时行驶定时计划(变更状态的行驶定时计划)算出(预测)基于模型的评价值(运算处理)。在尚未生成模型的情况下,通过预先定义的评价函数来算出评价值,将在后面对此进行描述。行驶定时计划部105将各临时行驶定时计划(变更状态的行驶定时计划)和各评价值相互关联地追加到搜索列表(步骤26)。搜索列表是暂时性地保持处理中的多个临时行驶定时计划(变更状态的行驶定时计划)的列表。
[0213]
行驶定时计划部105按评价值的降序排列搜索列表内的各临时行驶定时计划(变更状态的行驶定时计划)(步骤27)。行驶定时计划部105提取搜索列表开头的临时行驶定时计划(变更状态的行驶定时计划)来作为接下来应该搜索的对象(选择处理)(该步骤27)。
[0214]
行驶定时计划部105对运算时间是否落在预定的限制时间内、或者反复次数是否落在规定的次数以内进行判断(步骤28)。反复次数能够将流程图的任意的范围作为对象。例如是步骤23~28的反复次数。若运算时间为限制时间内或者反复次数为规定的次数以内(步骤28:是),则返回到步骤23。在步骤23中,将在步骤27中提取到的临时行驶定时计划(变更状态的行驶定时计划)新视为初始状态的行驶定时计划,接着进行检测处理(最先产生竞争的弧线和进行竞争的移动体对的检测。前次或者那以前所检测到的竞争已消除)。
[0215]
在步骤23判断为在新视为初始状态的行驶定时计划的临时行驶定时计划(变更状态的行驶定时计划)未产生竞争的情况下(步骤24:是),将其作为应该输出的行驶定时计划的候选。因此,将该临时行驶定时计划(变更状态的行驶定时计划)作为行驶定时计划的候选,使之与其评价值一起从搜索列表移动到解列表(步骤31)。解列表是暂时性地保持成为输出对象的行驶定时计划的候选的列表。
[0216]
行驶定时计划部105按评价值的顺序排列解列表(步骤32)。
[0217]
行驶定时计划部105提取搜索列表的开头的临时行驶定时计划(变更状态的行驶定时计划)来作为接下来的处理对象(步骤33),将其视为初始状态的行驶定时计划,返回到步骤23。
[0218]
在运算时间超过了限制时间、或者反复次数超速了规定的次数的情况下(步骤28:否),行驶定时计划部105对解列表中是否具有至少一个行驶定时计划的候选进行检查(步骤29)。在解列表不是空的情况下(步骤29:否),输出解列表的开头的行驶定时计划的候选来作为解。即,输出该候选所包含的各移动体的个别行驶计划(临时个别行驶计划)的集合来作为更新后的行驶定时计划(步骤30)。解列表被按评价值的降序来排列,因此,解列表的开头的候选是评价最高的候选。
[0219]
另一方面,在解列表为空的情况下(步骤29:是),行驶定时计划部105提取搜索列表开头的临时行驶定时计划(变更状态的行驶定时计划)来作为解(步骤34)。在该提取到的解的各移动体的临时个别行驶计划中,确定消除了竞争的时间的范围(完成到途中的计划部分),输出包括所确定的范围的计划部分来作为各移动体的个别行驶计划的驶定时计划(步骤35)。
[0220]
在图15中表示图12的流程图的行驶定时计划部的搜索处理中的搜索树的例子。图15的最上的初始状态是与图13的(b)所示的行驶定时计划对应的状态(但是变更了比例尺)。
[0221]
对于产生相反向的行驶的行驶道路(竞争弧线),具有使移动体1待机的情况和使移动体2待机的情况的各自两个模式的避免竞争的对策。与为了避免竞争而使哪个移动体进行待机相应地,接下来发生竞争的时刻和发生竞争的行驶道路也会变化。在图12的步骤25中,当进行使移动体2优先的操作(使移动体1待机的操作)时,得到变更状态1的行驶定时计划(临时行驶定时计划1),当进行使移动体1优先的操作(使移动体2待机的操作)时,得到变更状态2的行驶定时计划(临时行驶定时计划2)。此外,图中的留白的箭头表示图解的变更了的地方。
[0222]
关于变更状态1的行驶定时计划和变更状态2的行驶定时计划分别取得评价值,将变更状态1的行驶定时计划和变更状态2的行驶定时计划与各个评价值一起保存于搜索列表(图12的步骤26)。搜索列表被按评价值的降序进行排列,变更状态1的行驶定时计划的评价值要大,因此,选择变更状态1的行驶定时计划(图12的步骤27)。
[0223]
将变更状态1的行驶定时计划视为初始状态的行驶定时计划,以递归的方式继续进行搜索(图12的步骤23)。根据使移动体2和移动体1中的哪个优先,得到变更状态3的行驶定时计划(临时行驶定时计划3)和变更状态4的行驶定时计划(临时行驶定时计划3)。关于变更状态3的行驶定时计划和变更状态4的行驶定时计划分别取得评价值。将变更状态3的行驶定时计划和变更状态4的行驶定时计划与各个评价值一起保存于搜索列表(图12的步骤26)。
[0224]
在搜索列表中,在该时间点,变更状态2的行驶定时计划、变更状态3的行驶定时计划、变更状态4的行驶定时计划被与各个评价值一起进行保存。选择其中评价值最大的行驶定时计划,将其视为初始状态的定时计划集,以递归的方式继续进行处理(步骤23)。
[0225]
这样,在图12的搜索算法中,依次对避免竞争对策的组合进行搜索。当移动体的台数多和/或竞争弧线的次数多时,避免竞争对策的组合的数量庞大,一般难以进行实时的计
划生成,但在图12的搜索算法中设为:使用评价函数或者模型来预测接下来进行调查的变更状态的行驶定时计划的评价值,优先地从评价值高的行驶定时计划开始进行搜索。由此,能够实现效率好的搜索。
[0226]
此时,通过应用被称为探索性最佳解搜索算法(a搜索)的搜索方法,能够以短时间得到评价高的行驶定时计划。在a搜索中,将关于搜索的途中状态的更新完成部分运算出的评价值和在未更新部分产生的评价值的预测值的合计作为评价值。例如,基于与在成为对象的行驶定时计划中消除了竞争的路径(已搜索的路径)对应的晚点时间、和在对于那之后的剩余的路径(未搜索的路径)假定为例如完全没有竞争的状态下所设想的晚点时间的预测值的合计,算出评价值。或者,基于在对于未搜索的路径假定为例如完全没有竞争的状态下所设想的晚点时间来算出评价值。
[0227]
在本实施方式中,能够充分地估计到能使用模型来高精度且高速地取得对未搜索的路径所预想的评价值,搜索效率提高。
[0228]
在图12的流程图的说明中,在步骤s26中使用模型算出(预测)了评价值,但在尚未生成模型的情况下、或者在即使生成了模型也并行地进行模型的更新的情况下,通过评价函数来算出评价值。此时,根据临时行驶定时计划(设为临时行驶定时计划a)求出由消除竞争引起的时间调整的晚点时间(视为晚点时间x),在未搜索的路径中,通过与剩余的行驶距离相应地以一定的比率产生晚点等的假定,预测晚点时间(设为晚点时间y)。并且,基于晚点时间x和晚点时间y的合计来算出评价值。并且,设为在接下来以后的处理中,选择该临时行驶定时计划a,进行消除竞争的操作,新生成了临时行驶定时计划(临时行驶定时计划b)。也即是,设为:作为临时行驶定时计划a的子节点,生成了临时行驶定时计划b。关于临时行驶定时计划b,与临时行驶定时计划a同样地算出评价值。此时,关于在临时行驶定时计划a中预测到的上述晚点时间y,通过利用对临时行驶定时计划b算出的评价值的晚点时间(设为晚点时间z)进行置换,从而对临时行驶定时计划a的评价值进行更新。即,基于晚点时间x和晚点时间z的合计来算出评价值,通过所算出的评价值来对临时行驶定时计划a的评价值进行更新。由此,能够使临时行驶定时计划a的评价值为更高精度的评价值。这样每当进行搜索时进行评价值的更新,搜索处理最终地完成的时间点的评价值被用作搜索日志的评价值。在本段落中说明的评价值的算出方法是一个例子,也可以为其他方法。
[0229]
在此,对前述的图11的步骤21的处理进行补充说明。在行驶定时计划部105的搜索处理(参照图12)结束时,例如在如图15那样的搜索树中,从最终端的变更状态(变更状态4)开始回溯搜索树的各变更状态直到初始状态。将各变更状态下的评价值(例如由该变更状态以后的时间调整引起的晚点时间的总和的实际值)、各变更状态下的多个移动体的状态特征量、各搜索深度设为组来作为多个搜索日志,将多个搜索日志存储于搜索日志存储部111。例如,在图15的例子的情况下,存储将变更状态1下的多个移动体的状态特征量、由从变更状态1到接下来的变更状态4的期间所产生的时间调整引起的晚点时间的总和、变更状态1的搜索深度(=1)作为组的搜索日志。另外,存在将初始状态下的多个移动体的状态特征量、由从初始状态起经过变更状态1到变更状态4为止的期间所产生的时间调整引起的晚点时间的总和、初始状态下的搜索深度(=0)作为组的搜索日志。在搜索日志存储部111存储有对过去的行驶定时计划制作的搜索日志的情况下,既可以对过去的搜索日志追加本次的搜索日志,也可以在废弃过去的搜索日志的一部分后追加本次的搜索日志。
[0230]
以上,根据本实施方式,能够避免僵持或者碰撞等的竞争来高速地制订多个移动体的运行计划。即使新导入移动体、移动体的作业的模式或者移动体的动作路线变动,也能够不使行驶效率降低地使移动体组群进行行驶。
[0231]
(硬件结构)
[0232]
在图16中表示图1的运行计划装置100的硬件结构。图1的运行计划装置100由计算机装置600构成。计算机装置600具备cpu601、输入接口602、显示装置603、通信装置604、主存储装置605以及外部存储装置606,这些部件通过总线607相互连接。图1的运行管理装置200也由与图16同样的硬件结构实现。
[0233]
cpu(中央运算装置)601在主存储装置605上执行作为计算机程序的行驶控制程序。行驶控制程序是指实现运行计划装置100的上述各功能结构的程序。行驶控制程序也可以不是一个程序,而是通过多个程序、脚本的组合来实现。通过cpu601执行行驶控制程序来实现各功能结构。
[0234]
输入接口602是用于向运行计划装置100输入来自键盘、鼠标以及触摸面板等输入装置的操作信号的电路。
[0235]
显示装置603显示从运行计划装置100输出的数据。显示装置603例如是lcd(液晶显示器)、有机电致发光显示器、crt(阴极射线管)或者pdp(等离子体显示器),但不限于此。从计算机装置600输出的数据能够显示于该显示装置603。
[0236]
通信装置604是用于运行计划装置100与外部装置以无线或者有线的方式进行通信的电路。能够经由通信装置604从外部装置输入数据。能够将从外部装置输入的数据保存于主存储装置605、外部存储装置606。
[0237]
主存储装置605存储行驶控制程序、行驶控制程序的执行所需要的数据以及通过执行行驶控制程序生成的数据等。行驶控制程序被展开在主存储装置605上而被执行。主存储装置605例如是ram、dram、sram,但不限于此。图1的各存储部也可以构建在主存储装置605上。
[0238]
外部存储装置606存储行驶控制程序、行驶控制程序的执行所需要的数据以及通过执行行驶控制程序生成的数据等。这些行驶控制程序、数据在执行行驶控制程序时被读出到主存储装置605。外部存储装置606例如为硬盘、光盘、闪速存储器以及磁带,但不限于此。图1的各存储部或者数据库也可以构建在外部存储装置606上。
[0239]
此外,行驶控制程序既可以预先安装于计算机装置600,也可以存储于cd-rom等的存储介质。另外,行驶控制程序也可以被上传到互联网上。
[0240]
另外,运行计划装置100既可以由单一的计算机装置600构成,也可以作为包括相互连接的多个计算机装置600的系统来构成。
[0241]
(第2实施方式)
[0242]
图17表示第2实施方式涉及的具备运行计划系统的整体系统结构的一个例子。图1的搜索日志存储部111被置换为行驶日志存储部115。对与图1相同的名称的块标记相同的标号,除了被扩展或者变更后的处理之外,适当省略说明。
[0243]
行驶定时计划部105生成将各变更状态下的多个移动体的状态特征量和各变更状态的搜索深度设为了组的数据(第2数据)来作为行驶日志。行驶定时计划部105将所生成的行驶日志保存于行驶日志存储部115。在对过去的行驶定时计划生成的行驶日志存储于行
驶日志存储部115的情况下,既可以对过去的行驶日志追加本次的行驶日志,也可以废弃过去的行驶日志的一部分后追加本次的行驶日志。
[0244]
基于实际的行驶结果来算出(测定)行驶日志的评价值(第2评价值),并追加到行驶日志来作为与各个移动体的状态特征量对应的评价值(第2评价值)。行驶日志的形式与第1实施方式的搜索日志相同,因此,省略搜索日志的图示。
[0245]
行驶日志存储部115存储通过行驶定时计划部105生成的行驶日志。
[0246]
模型生成部113基于存储于行驶日志存储部115的行驶日志,生成模型。具体而言,与第1实施方式同样地,生成根据多个移动体的状态特征量预测评价值的模型。模型的种类与第1实施方式相同,因此,省略说明。
[0247]
图18是第2实施方式涉及的运行计划系统1的整体动作的流程图。与第1实施方式的图11的流程图的不同在于:步骤15之后的步骤21被删除,在步骤20为“是”之后追加了步骤22。
[0248]
在步骤22中,行驶定时计划部105对行驶日志存储部115追加完成了运行的移动体的行驶日志,模型生成部113基于存储于行驶日志存储部115的行驶日志,生成或者更新模型。在模型存储部112中尚不存在模型时,生成模型,在已经存在模型时,对模型进行更新。使用模型和行驶日志来算出模型的精度。例如将行驶日志中的多个移动体的状态特征量作为输入,通过模型算出(预测)评价值。算出所预测到的评价值与行驶日志所包含的评价值(第2评价值)的差分。若差分的平均值为阈值以上,则判断为模型的精度高,若小于阈值,则判断为精度低。在判断为精度高的情况下,在下次以后的步骤15中,使用模型来预测评价值。模型生成部113也可以对行驶定时计划部105通知是否得到了精度高的模型的信息。在使用模型来预测评价值的情况下,既可以省略步骤21,也可以执行步骤21。
[0249]
此外,在步骤15中生成模型之前,与第1实施方式同样地通过预先定义的评价函数算出各变更状态(临时行驶定时计划)的评价值,基于评价值来选择临时行驶定时计划。并且,基于所选择的临时行驶定时计划,对行驶定时计划进行更新。与搜索处理中的评价值的计算相独立地进行基于行驶实际状况的评价值(第2评价值)的算出。
[0250]
也可以在得到了精度高的模型之后,也定期地在步骤15中进行基于行驶实际状况的评价值的算出,将行驶日志追加到行驶日志存储部115,在步骤22中对模型进行更新。
[0251]
根据本实施方式,通过使用基于行驶实际状况算出的评价值(第2评价值)生成模型,能够进行精度高的评价值的预测。
[0252]
(第3实施方式)
[0253]
第3实施方式是组合了第1实施方式和第2实施方式的实施方式。
[0254]
在图19中表示第3实施方式涉及的具备运行计划系统的整体系统结构的一个例子。在图1的运行计划系统追加了行驶日志存储部115。模型生成部113使用搜索日志存储部111的搜索日志、行驶日志存储部115的行驶日志这两方来生成或者更新模型。也可以将搜索日志和行驶日志一并存储于一个存储部。通过使用这两方的日志,能够进行精度高的模型的学习。
[0255]
图20是第3实施方式涉及的运行计划系统1的整体动作的流程图。在第1实施方式的图11的流程图中的步骤20为“是”之后追加了步骤22。步骤22的处理与第2实施方式相同。对于图20所示的处理的详细,根据第1实施方式和第2实施方式的说明来明确,因此,省略说
明。
[0256]
(第4实施方式)
[0257]
在图21中表示第4实施方式涉及的具备运行计划系统的整体系统结构的一个例子。各移动体具备路径计划部309和路径计划存储部302,运行计划装置100不具备路径计划部。路径计划部309具有与图1的路径计划部109同样的功能。第4实施方式是对第3实施方式进行了一部分变更后的实施方式,但也可以同样地对第1实施方式或者第2实施方式进行变更。
[0258]
各移动体的路径计划部309自主地决定路径计划,将路径计划保存于路径计划存储部302。另外,各移动体经由运行管理装置210的通信部211或者通信装置501向运行计划装置100发送路径计划的数据。运行计划装置100将各移动体的路径计划保存于路径计划存储部102。也可以在各移动体没有路径计划部309,在各移动体的路径计划存储部302预先存储有各移动体的路径。
[0259]
在第4实施方式中,各移动体为具备slam的自主型的移动机器人、自动行驶的汽车、工程机械等,设想了在处于运行计划装置100和运行管理装置200的管理下的行驶道路上进行行驶的情况等。设想了如下情况:预先决定各移动体的路径计划,或者,各移动体自主地决定路径计划,因此,无法在运行计划装置100和运行管理装置200侧自由地对各移动体的路径计划进行变更。在这样的情况下,也能够通过用运行计划装置100适当地生成行驶定时计划,对各移动体指示移动指令数据,从而保障使之不产生碰撞或者僵持等的行驶。在若无法生成使之不产生碰撞或者僵持的行驶定时计划的情况下,运行计划装置100也可以经由运行管理装置200向各移动体发送路径计划的变更请求。
[0260]
(第5实施方式)
[0261]
图22表示第5实施方式涉及的具备运行计划系统的整体系统结构的一个例子。在本实施方式中,基本的各功能部与第1实施方式~第4实施方式相同,但至少1台移动体具备相当于运行计划装置(或者运行计划系统)的功能。除此之外的移动体具备路径计划部309、路径计划存储部302以及通信部310。通信部310与其他移动体进行无线通信。
[0262]
具有相当于运行计划装置的功能的移动体中的1台移动体成为主移动体(master)。在图中示出移动体301_x成为了主移动体的例子。例如也可以通过在具有相当于运行计划装置的功能的移动体之间相互进行交涉来决定主移动体。或者,也可以按预先确定的优先顺位来决定主移动体。例如,也可以是性能最高的移动体或者电池剩余量最大的移动体成为主移动体。也可以通过其他方法决定主移动体。
[0263]
移动体301_x以外的移动体的路径计划部309在自主地决定了路径计划之后,向成为了主移动体的移动体301_x发送路径计划。或者,也可以预先在路径计划存储部302存储有路径计划。在该情况下,路径计划部309不自己进行路径计划的生成,而是读出路径计划存储部302内的路径计划的数据来发送给主移动体。
[0264]
成为了主移动体的移动体301_x总括地生成包括多个移动体的个别行驶计划的行驶定时计划,该多个移动体包括成为了主移动体的该移动体301_x自身。主移动体生成行驶定时计划以使得不变更各移动体的路径计划。移动体301_x向各移动体发送基于行驶定时计划的移动指令数据。各移动体基于移动指令数据来对行驶进行控制。由此,不会使之产生碰撞或者僵持等,作为整体能够实现效率好的行驶。
[0265]
移动体301_x以外的移动体也可以不具备路径计划部309和路径计划存储部302。在该情况下,移动体301_x以外的移动体进行与第1实施方式的移动体中的能够同运行管理装置200的通信部201进行通信的移动体同样的动作。
[0266]
对于在第1实施方式或者第4实施方式中状态检测部202所检测到的信息,在第5实施方式中,各移动体自己进行检测,经由通信部310发送给运行计划装置100。
[0267]
在第5实施方式中,各移动体为具备slam的自主型的移动机器人、自动行驶的汽车、工程机械等,设想了在单线的行驶道路中发生相反方向行驶、超车的构造的行驶道路网络上进行行驶的情况等。设想了如下情况:预先决定了各移动体的路径计划,或者,各移动体以自主的方式决定路径计划,因此,他人无法自由地变更路径计划。在这样的情况下,也能够通过成为了主移动体的移动体适当地生成行驶定时计划,并对各移动体进行指示,从而保持使之不产生碰撞或者僵持的行驶。在若无法生成使之不产生碰撞或者僵持的行驶定时计划的情况下,成为了主移动体的移动体也可以向其他移动体发送路径计划的变更请求。
[0268]
[技术方案1]
[0269]
一种行驶控制装置,具备:
[0270]
控制部,其基于多个移动体的行驶计划来对所述多个移动体的行驶进行控制;
[0271]
计划部,其对所述行驶计划的一部分进行变更来生成多个临时行驶计划;
[0272]
评价值算出部,其基于所述临时行驶计划中的所述多个移动体的状态特征量来算出所述临时行驶计划的评价值;以及
[0273]
模型,其将多个移动体的状态特征量和评价值相关联,
[0274]
所述评价值算出部基于所述模型和所述临时行驶计划中的所述多个移动体的状态特征量来算出所述评价值,
[0275]
所述计划部进行搜索运算,所述搜索运算反复进行如下处理:基于多个所述评价值从所述多个临时行驶计划中选择临时行驶计划,通过所选择的所述临时行驶计划来对所述行驶计划进行更新。
[0276]
[技术方案2]
[0277]
根据技术方案1所述的行驶控制装置,
[0278]
所述计划部算出在所述临时行驶计划中产生的所述多个移动体的晚点时间,基于所述多个移动体的所述晚点时间的总和来算出所述评价值,
[0279]
所述行驶控制装置具备模型生成部,所述模型生成部取得第1数据,基于多个所述第1数据来生成所述模型,所述第1数据包括所述临时行驶计划中的所述多个移动体的状态特征量和所算出的所述评价值。
[0280]
[技术方案3]
[0281]
根据技术方案2所述的行驶控制装置,
[0282]
所述计划部基于在更新前的所述行驶计划中产生的所述多个移动体的晚点时间和在所述临时行驶计划中产生的所述多个移动体的晚点时间的总和来算出所述评价值。
[0283]
[技术方案4]
[0284]
根据技术方案1所述的行驶控制装置,
[0285]
所述评价值算出部在所述多个移动体的行驶完成之后,根据所述多个移动体的行
驶实际状况算出基于晚点时间的所述评价值,
[0286]
所述行驶控制装置具备模型生成部,所述模型生成部取得第2数据,基于多个第2数据来生成所述模型,所述第2数据包括所述临时行驶计划中的所述多个移动体的状态特征量和所算出的所述评价值。
[0287]
[技术方案5]
[0288]
根据技术方案1~4中任一项所述的行驶控制装置,
[0289]
所述多个移动体的状态特征量包括所述多个移动体的位置信息、所述多个移动体的剩余行驶距离以及与所述多个移动体搬送的货物有关的信息中的至少一个。
[0290]
[技术方案6]
[0291]
一种行驶控制方法,包括:
[0292]
基于多个移动体的行驶计划来对所述多个移动体的行驶进行控制,
[0293]
对所述行驶计划的一部分进行变更来生成多个临时行驶计划,
[0294]
根据所述临时行驶计划中的所述多个移动体的状态特征量,基于将多个移动体的状态特征量和评价值相关联了的模型,算出所述临时行驶计划的评价值,
[0295]
基于多个所述评价值从所述多个临时行驶计划中选择临时行驶计划,通过所选择的所述临时行驶计划来对所述行驶计划进行更新,
[0296]
基于与所述模型不同的评价函数或者所述多个移动体的行驶实际状况,算出所述临时行驶计划的评价值,
[0297]
生成将所述多个移动体的状态特征量与基于所述评价函数或者所述行驶实际状况算出的所述评价值相关联了的数据,
[0298]
基于所述数据来对所述模型进行更新。
[0299]
[技术方案7]
[0300]
一种计算机程序,用于使计算机执行:
[0301]
基于多个移动体的行驶计划来对所述多个移动体的行驶进行控制的步骤;
[0302]
对所述行驶计划的一部分进行变更来生成多个临时行驶计划的步骤;
[0303]
根据所述临时行驶计划中的所述多个移动体的状态特征量,基于将多个移动体的状态特征量和评价值相关联了的模型,算出所述临时行驶计划的评价值的步骤;
[0304]
基于多个所述评价值从所述多个临时行驶计划中选择临时行驶计划,通过所选择的所述临时行驶计划来对所述行驶计划进行更新的步骤;
[0305]
基于与所述模型不同的评价函数或者所述多个移动体的行驶实际状况,算出所述临时行驶计划的评价值的步骤;
[0306]
生成将所述多个移动体的状态特征量与基于所述评价函数或者所述行驶实际状况算出的所述评价值相关联了的数据的步骤;以及
[0307]
基于所述数据来对所述模型进行更新的步骤。
[0308]
此外,本发明并不限定为上述实施方式不变,可以在实施阶段中在不脱离其宗旨的范围内对构成要素进行变形来具体化。另外,通过适当地组合上述各实施方式所公开的多个构成要素,能够形成各种发明。另外,例如也可以考虑从各实施方式所示的全部构成要素中删去几个构成要素后的结构。进一步,也可以适当地组合不同实施方式所记载的构成要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

