1.本发明涉及区域控制的技术领域,尤其涉及一种物联网设备位置区域控制方法。
背景技术:
2.随着大量小型民用无人机进入我们的日常生活,必然需要对它们进行监管,但是目前并没有比较明确的监管制度。随着这个行业的不断蓬勃发展,必须要尽快建立起比较规范且科学的无人机监管措施,尤其是对飞机场等禁飞区周围无人机的监管,由于近年来不断地发生相关的安全事故,更是显得迫在眉睫。
3.为了保障低空域交通安全,及时的防止禁飞区周围的无人机闯入该区域,造成不必要的安全事故,我们应该提前进行预测判断,对处于禁飞区之外一定监管范围内的无人机进行实时的预警。通过预测该无人机是否会进入禁飞区,就能够在无人机与禁飞区相隔较远时提前作出预警,及时通知该无人机,让其改变所操控的无人机的飞行速度或者方向,从而规避危险,便显得非常重要。
技术实现要素:
4.本发明提供的物联网设备位置区域控制方法,能够克服现有物联网中无人机容易被非法使用的问题。
5.本发明提供一种物联网设备位置区域控制方法,包括:
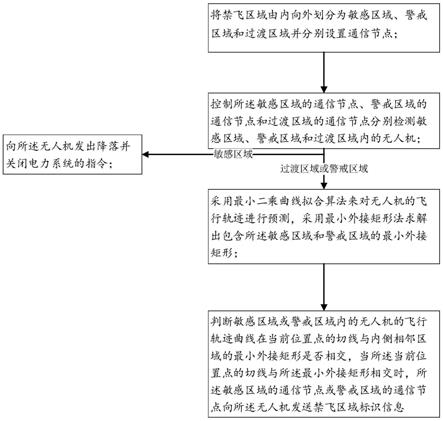
6.将禁飞区域由内向外划分为敏感区域、警戒区域和过渡区域并分别设置通信节点;
7.控制所述敏感区域的通信节点、警戒区域的通信节点和过渡区域的通信节点分别检测敏感区域、警戒区域和过渡区域内的无人机;当所述敏感区域内检测到无人机时,向所述无人机发出降落并关闭电力系统的指令;当所述警戒区域的通信节点或过渡区域的通信节点检测到无人机时,
8.采用最小二乘曲线拟合算法来对无人机的飞行轨迹进行预测,采用最小外接矩形法求解出包含所述敏感区域和警戒区域的最小外接矩形;
9.判断敏感区域或警戒区域内的无人机的飞行轨迹曲线在当前位置点的切线与内侧相邻区域的最小外接矩形是否相交,当所述当前位置点的切线与所述最小外接矩形相交时,所述敏感区域的通信节点或警戒区域的通信节点向所述无人机发送禁飞区域标识信息。
10.可选地,同一区域内具有多个通信节点,同一区域内相邻的通信节点的覆盖范围具有重合区域;
11.当所述无人机位于所述重合区域内时,覆盖所述重合区域的两个或两个以上的通信节点同时向所述无人机发送指令或标识信息。
12.可选地,所述禁飞区域标识信息包括要求所述控制器按照指定周期发送所述控制器的位置请求信息、要求所述控制器按照指定周期发送所述控制器定位参考信号信息、告
知所述控制器所述第一无人机进入禁飞区域;
13.所述禁飞区域标识信息还包括对应区域内的允许飞行高度和允许飞行速度。
14.可选地,当所述无人机距离所述敏感区的最小外接矩形的距离小于5米时,所述警戒区域内的通信节点向所述无人机发送要求所述无人机发送身份信息的请求信息。
15.可选地,警戒区域内的通信节点接收所述无人机身份信息并转发给无人机管理中心。
16.可选地,所述无人机管理中心依据所述无人机身份信息确定无人机控制器信息,所述无人机管理中心向所述无人机控制器发送停止操控无人机的请求。
17.可选地,当所述通信节点检测到所述无人机与内侧相邻区域的最小外接矩形的距离小于预定距离时,所述通信节点向内侧相邻区域内的通信节点发送激活指令。
18.可选地,所述过渡区域的通信节点个数是所述警戒区域的通信节点个数的1/4,所述警戒区域的通信节点个数是所述敏感区域的通信节点个数的1/10。
19.可选地,计算进入所述禁飞区域内的无人机数量,当所述无人机数量大于第一预定数量时,将所述警戒区域变更为敏感区域;当所述无人机数量大于第二预定数量时,将所述过渡区域变更为敏感区域;所述第一预定数量小于所述第二预定数量。
20.可选地,计算所述无人机进入禁飞区域内的时间,当所述无人机进入禁飞区域内的时间超过预定时间时,所述通信节点向所述无人机发送降落并关闭电力系统的指令。
21.本发明物联网设备位置区域控制方法将禁飞区域划分为不同等级,并对不同等级的禁飞区域设定不同的应对措施,从而能够及时对进入禁飞区域的无人机进行处理,避免无人机进入敏感区域。
附图说明
22.图1为本发明一实施例物联网设备位置区域控制方法的流程图;
23.图2为本发明一实施例物联网设备位置区域控制方法区域划分示意图;
24.图3为本发明一实施例物联网设备位置区域控制方法的判断无人机飞行路径的流程图。
具体实施方式
25.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.本发明实施例提供物联网设备位置区域控制方法,如图1所示,包括:
27.如图2所示,将禁飞区域由内向外划分为敏感区域、警戒区域和过渡区域并分别设置通信节点;
28.控制所述敏感区域的通信节点、警戒区域的通信节点和过渡区域的通信节点分别检测敏感区域、警戒区域和过渡区域内的无人机;当所述敏感区域内检测到无人机时,向所述无人机发出降落并关闭电力系统的指令;当所述警戒区域的通信节点或过渡区域的通信节点检测到无人机时,
29.采用最小二乘曲线拟合算法来对无人机的飞行轨迹进行预测,采用最小外接矩形法求解出包含所述敏感区域和警戒区域的最小外接矩形;
30.判断敏感区域或警戒区域内的无人机的飞行轨迹曲线在当前位置点的切线与内侧相邻区域的最小外接矩形是否相交,当所述当前位置点的切线与所述最小外接矩形相交时,所述敏感区域的通信节点或警戒区域的通信节点向所述无人机发送禁飞区域标识信息。
31.如图3所示,采用最小二乘曲线拟合算法来对无人机的飞行轨迹进行预测,接着将描述禁飞区的电子围栏的各个拐点经纬度坐标转换到高斯平面直角坐标系中的平面坐标,然后采用mert(最小外接矩形法)算法求解出包含该电子围栏的最小外接矩形,最后通过直接计算无人机的飞行轨迹曲线在当前位置点的切线与电子围栏的最小外接矩形是否相交来预测该无人机是否会进入禁飞区。
32.如果无人机飞行轨迹曲线在当前位置点的切线与电子围栏的最小外接矩形相交,求出与当前点距离最近的交点,并计算当前时刻无人机离禁飞区的距离,及时实施告警,将当前时刻无人机离禁飞区的距离等告警信息以udp的方式发送给该无人机操控手的客户端,通知该操控手改变无人机的飞行速度或方向,避免发生危险碰撞;如果不相交,则进行下一时刻的预警。
33.作为可选的具体实施方式,如果无人机进入过渡区域,则无人机接收到过渡区域标识信息后,确定禁飞区域的位置,通过无人机自带的导航系统避免进入警戒区域和敏感区域,并将无人机的飞行速度降低到2千米/小时,飞行高度低于10米,这样做的好处是可以很好地控制无人机的飞行速度和活动范围;无人机给自己的控制器发送第一指令信息,控制器收到第一指令信息后,周期发送控制器的位置信息,周期发送用于定位控制器的定位参考信号,这样做的好处是无人机管理中心可以确定控制器的位置信息,根据警戒需要制定处理控制器和相关操控无人机人员的策略。
34.如果无人机进入警戒区域,则无人机接收到警戒区域标识信息后,无人机关闭自带的导航系统,这样做的好处有效避免被不法分子恶意修改无人机自带导航系统而带来的无人机无法有效控制的问题,然后无人机根据禁飞区域的地图信息和警戒节点的位置信息,无人机确认自己在禁飞区域中的位置,将自己的飞行速度降低到1千米/小时,飞行高度低于5米,要避免进入敏感区域。
35.如果无人机进入敏感区域,则无人机接收到敏感区域标识信息后,无人机需要马上降落并关闭所有的电力系统,这样做的好处是有效避免无人机继续进入敏感区域。
36.可选地,同一区域内具有多个通信节点,同一区域内相邻的通信节点的覆盖范围具有重合区域;
37.当所述无人机位于所述重合区域内时,覆盖所述重合区域的两个或两个以上的通信节点同时向所述无人机发送指令或标识信息。
38.例如,如果过渡区域中包含多个过渡区域节点,则多个过渡区域节点发送相同的过渡区域标识信息,这样做的好处是增加进入过渡区域的无人机成功接收到过渡区域标识信息成功的概率,避免无人机继续进入禁飞区域。
39.可选地,所述禁飞区域标识信息包括要求所述控制器按照指定周期发送所述控制器的位置请求信息、要求所述控制器按照指定周期发送所述控制器定位参考信号信息、告
知所述控制器所述第一无人机进入禁飞区域;
40.所述禁飞区域标识信息还包括对应区域内的允许飞行高度和允许飞行速度。
41.这样做的好处是无人机管理中心可以确定控制器的位置信息,根据警戒需要制定处理控制器和相关操控无人机人员的策略。还可以让无人机管理中心确定控制器的位置信息,并让控制器知道自己控制的无人机进入了禁飞区域,应及时采取离开措施。
42.可选地,当所述无人机距离所述敏感区的最小外接矩形的距离小于5米时,所述警戒区域内的通信节点向所述无人机发送要求所述无人机发送身份信息的请求信息。
43.可选地,警戒区域内的通信节点接收所述无人机身份信息并转发给无人机管理中心。
44.这样做的好处无人机管理中心可以尝试通过其它手段控制试图进入禁飞区域的第一无人机。
45.可选地,所述无人机管理中心依据所述无人机身份信息确定无人机控制器信息,所述无人机管理中心向所述无人机控制器发送停止操控无人机的请求。
46.无人机管理中心收到身份信息后,确定第一无人机的控制器信息,通过无线通信系统通知控制器停止发送信息给第一无人机,从而能够让控制器及时控制无人机离去。
47.可选地,当所述通信节点检测到所述无人机与内侧相邻区域的最小外接矩形的距离小于预定距离(例如5米)时,所述通信节点向内侧相邻区域内的通信节点发送激活指令。这样可以降低整个系统的功耗,又能够及时检测无人机的飞入。
48.可选地,所述过渡区域的通信节点个数是所述警戒区域的通信节点个数的1/4,所述警戒区域的通信节点个数是所述敏感区域的通信节点个数的1/10。这样做的好处通过增加敏感区域节点的数量尽可能让进入到敏感区域的无人机停止入侵
49.可选地,计算进入所述禁飞区域内的无人机数量,当所述无人机数量大于第一预定数量(例如5架)时,将所述警戒区域变更为敏感区域;当所述无人机数量大于第二预定数量(例如10架)时,将所述过渡区域变更为敏感区域;所述第一预定数量小于所述第二预定数量。当多架无人机入侵到禁飞区域时,说明情况非常严重,需要扩大敏感区域的范围以加强对敏感区域的保护。
50.可选地,计算所述无人机进入禁飞区域内的时间,当所述无人机进入禁飞区域内的时间超过预定时间(例如20分钟)时,所述通信节点向所述无人机发送降落并关闭电力系统的指令。当无人机长期停留在禁飞区域中时,可以判断其具有一定的恶意,因此,需要向其发出降落并关闭电力系统的指令。
51.本实施例物联网设备位置区域控制方法将禁飞区域划分为不同等级,并对不同等级的禁飞区域设定不同的应对措施,从而能够及时对进入禁飞区域的无人机进行处理,避免无人机进入敏感区域。
52.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

