1.本发明属于机械设计、自动化等技术领域,尤其是涉及应用传感器及集成电路和运动控制系统进行姿态控制的一种基于六自由度运动平台的电子稳定系统的设计方法。
背景技术:
2.现有的载人飞行器座椅大多不具备减震功能,在飞行器载体进行变速、左右摇摆、前后俯仰、旋转等产生某方向上的加速度、角加速度时,座椅上的乘客也会随之身体左右摇晃、前后俯仰,造成不适,使用体验感下降。
3.如何通过传感器获得姿态信息;如何将姿态信息以电信号形式通过集成电路传输至处理器;如何建立起六自由度运动控制系统;如何矫正通过运动控制系统得到的结果;如何设计可根据接受到的电信号随时控制姿态的减震座椅是本领域技术人员亟待解决的难题。
技术实现要素:
4.本发明的目的在于针对现有技术存在的上述问题,提供一种基于六自由度运动平台的电子稳定系统的设计方法。
5.本发明包括以下步骤:
6.1)通过陀螺仪和加速度传感器获得载体(飞行器)的姿态信息;
7.2)将姿态信息转化为电信号通过集成电路传输;
8.3)基于计算机pci总线以dsp fpga架构建立六自由度运动控制系统;
9.4)建立线性误差模型,进行误差矫正;
10.5)六自由度座椅的核心机械结构的设计。
11.在步骤1)中,所述陀螺仪采用三轴mems陀螺仪,用于采集运载体轴向角速率传输数学平台进行姿态运算得出姿态角,分别是航向角ψ、横滚角γ、俯仰角θ;
12.所述加速度传感器采用三轴加速度计,用于分别采集3个轴向的加速度;
13.所述进行姿态运算得出姿态角的具体步骤可为:
14.陀螺仪所测得3个轴向在导航坐标系相对与地理坐标系下角速度矢量ω
tb
=[ψ,γ,θ]
t
,角速度在导航坐标系下的投影为:
[0015][0016]
其中,分别表示x、y、z轴方向角速度;
[0017]
代入四元素法中进行坐标变换,经过一次旋转直接将导航坐标系转变到地理坐标系下;四元素q=λ p1i p2j p3k描述的是载体的b系相对于t系的角位置,利用α转角的三角函数得出规范化的四元素为:
[0018][0019]
得到姿态角:
[0020][0021]
基于加速度计进行姿态解算,对于静止状态下物体,其加速度计测量得到的三轴加速度数据a
x
,a
r
,a
z
,其矢量和为当地的重力加速度,根据欧拉角的关系,利用即可求得物体的姿态角
[0022]
在步骤2)中,所述将姿态信息转化为电信号通过集成电路传输的具体步骤可为:
[0023]
加速度计采集到信号,加以陀螺仪获取的姿态信息,经由rs232接口传送到导航计算机;运用matlab进行编程,利用四元素法将载体坐标的信息转换到地理坐标后,将信号进行低通滤波处理,获取到实际所需的信号:
[0024]
加速计测量出的竖直方向的原始信号减去低通滤波法计算出趋势项曲线,所得到去除趋势项后的曲线再经过平均值法去除直流,既可以去除由温度引起的趋势项以及直流量,又可以避免在后期二次积分后发生数值失真和畸变等现象;
[0025]
采集的加速度信号转变为速度或者位移时需要进行一次或二次积分,将积分得出的结果用滑动平均算法拟合出一条趋势线,然后用结果减去所拟合的趋势项从而得到平滑稳定的数据:其中,f(x)为实际测得的数据;t0是滑动长度;t代表的是采集信号个数;
[0026]
假设外界角速率为常值,考虑系统机械正交耦合并忽略量级较小的离心力,三轴mems陀螺仪的运动方程为:
[0027][0028]
式中:u
x
,u
r
,u
z
表示3个轴向的控制力,c
xx
,c
yy
,c
zz
为三轴等效阻尼项,k
xx
,k
yy
,k
zz
为三轴等效刚度项;假设机械耦合导致对称的阻尼项c
xy
,c
xz
,c
y2
和刚度项k
xx
,k
yy
,k
zz
;ω
x
,ω
y
,ω
z
是3个轴向的外界角速率,得到三轴mems陀螺仪的无量纲运动方程为:
[0029][0030]
向量形式为:其中,
[0031][0032]
控制目标变为:设计合适的控制律让陀螺3个轴向跟踪不同频率的正弦信号,同时实时预估并补偿闭环系统的不匹配干扰。
[0033]
在步骤3)中,所述六自由度运动控制系统的硬件部分包括:核心处理器dsp模块、协处理器fpga模块、与pc机接口的pci模块、外围接口模块;所述核心处理器dsp模块包括dsp电源、基于锁相环的时钟、jtag仿真接口和外部接口;所述协处理器fpga模块包括fpga电源和配置电路;所述与pc机接口的pci模块包括pci9052串行eeprom配置、pci9052数据传输电路以及pci模块;所述外围接口模块包括轴脉冲输出电路、编码器差分输入电路和通用数字i0信号电路;
[0034]
pci9052接口芯片作为桥芯片用于对复杂的pci总线协议进行转换,实现pci局部总线与pci用户设备之间的连接。协处理器fpga模块用于接收ep1k50接口芯片局部总线端传递过来的指令和数据,经过内部逻辑处理后发送给dsp芯片tms320f28335进行运动控制算法处理,同时将有用信息反馈给pci局部总线,并且控制外围接口模块等;dsp芯片tms320f28335负责处理各种运动控制算法(粗插补、位置和速度);运动控制系统用于控制步进电机和全数字伺服电机,板卡根据上位机的命令产生脉冲序列,利用所产生的脉冲个数、频率以及频率变化率分别控制电机的位置、速度及加速度指令。
[0035]
在步骤4)中,所述误差矫正先建立线性误差模型,根据载体坐标系下的输出和imu传感器的输出拟合计算各项误差系数,利用误差系数将传感器坐标系下的原始数据标定为较精确的载体坐标系下的数据,具体步骤可为:
[0036]
(1)三轴陀螺仪的误差通常包括零偏误差、灵敏度误差、非正交误差、随机漂移等;将三轴mems陀螺仪的误差模型简化为式:
[0037][0038]
ω=(ω
1 ω
2 ω3)
t
为载体角速度的准确值,为陀螺仪测得的角速度;三轴陀螺仪的各种误差均包含于矩阵k=(k
ij
)3×3与矢量b=(b
1 b
2 b3)
t
中;利用叉积法标定陀螺仪,通过叉积标定法的积分形式(u为参考系中某个固定不变的矢量):
[0039][0040]
将陀螺仪的各误差系数完全分离出来,由于传感器误差模型是线性的,故利用最
小二乘法拟合该模型求取各项误差系数,结合上式,即可求出标定后的传感器数据;
[0041]
(2)在acex 1k系列fpga内部设计能够使运动控制误差减小的模块,包括精插补模块、编码器反馈模块、计数器模块、通用数字io接口模块和双口ram模块等;并在运动平台上安装光栅尺,用于检测平台的实际位置,并反馈给运动控制系统;运动控制系统根据反馈信号随时调整发给电动机驱动器的信号,其传动机构、运动平台和负载产生的各种误差都即时反馈到运动控制卡中,并能立即得到补偿使运动平台的误差始终控制在精度范围以内。
[0042]
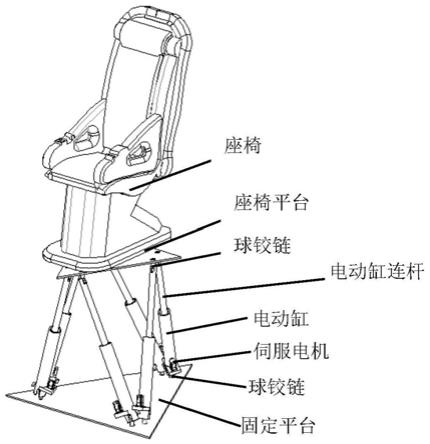
在步骤5)中,所述六自由度座椅的核心机械结构采用“六连杆作动”的机械结构,由座椅平台、固定平台、铰链组件以及电动缸、伺服电机组成,装置结构示意图如图6所示。
[0043]
座椅平台随电动缸运动,固定平台通过螺栓固连在地面(机舱),起支撑固定作用,座椅平台和固定平台与6组电动缸的上下两端铰链组件相连接,铰接点均匀分布在大小不同的圆上,构成六边形;座椅平台与电动缸连杆通过两两相连的铰链组件构成6个万向节铰接点,固定平台与电动缸通过两两相连的铰链组件构成6个万向节铰接点,连杆与电动缸构成6个移动副。
[0044]
将加速度传感器以及三轴陀螺仪安装在座椅平台底面中央位置以获取姿态信息,通过接线连接至机械结构外部的控制芯片,并控制电动缸的动作,使得座椅平台随外部飞行器姿态的变化而调整,保证座椅平台的稳定性。
[0045]
与现有技术相比,本发明的有益效果如下:
[0046]
本发明可应用于各类载人飞行器,利用陀螺仪、加速计等传感器通过相关的计算公式借助matlab程序将载体姿态信息转换为电信号,基于计算机pci总线以dsp fpga架构建立六自由度运动控制系统,通过叉积标定法和建立闭环反馈系统减小误差,从而以电机控制可三维空间下任意调节位置的座椅到适当姿态,达到飞行器座椅时时自动根据飞行器的运动状态调整自身姿态的效果,提升乘客飞行器乘坐舒适感、体验感。本发明通过应用传感器、设计电路系统、编写控制程序、进行闭环矫正、合理布置机械结构,实现在飞行器飞行过程中,减震座椅自动根据飞行器的摇摆、俯仰、旋转状态调整座椅三维空间下的状态,从而使座椅上与地表保持相对姿态不变,达到减震效果。使用飞行器减震座椅的乘客不会因飞行器变速、转弯、起降的加速度而感到不适,真正感受到平稳飞行。
附图说明
[0047]
图1为捷联式导航原理图。
[0048]
图2为载体坐标系与地理坐标系之间的转换关系图。
[0049]
图3为惯导融合算法原理图。
[0050]
图4为本发明实施例运动控制系统框图。
[0051]
图5为本发明实施例全闭控制系统框图。
[0052]
图6为本发明实施例六自由度座椅结构示意图。
具体实施方式
[0053]
以下实施例将结合附图对本发明作进一步的说明。
[0054]
本发明实施例包括以下步骤:
[0055]
1、通过陀螺仪和加速度传感器获得载体(飞行器)的姿态信息
[0056]
运用三轴加速度计分别采集载体(飞行器)3个轴向的加速度、三轴陀螺仪采集运载体轴向角速率传输数学平台进行姿态运算可得出姿态角(分别是航向角ψ、横滚角γ、俯仰角θ),将所得到的姿态角输入姿矩阵内转换,计算并处理变换后加速度数值,便可获得载体在受外载荷动荡时的姿态、速度与位移,如图1所示。陀螺仪所测得3个方轴向在导航坐标系相对与地理坐标系下角速度矢量ω
tb
=[ψ,γ,θ]
t
,角速度在导航坐标系下的投影为(其中表示x、y、z轴方向角速度):
[0057][0058]
所求姿态角代入四元素法中进行坐标变换,经过一次旋转直接将导航坐标系转变到地理坐标系下。如图2所示,四元素q=λ p1i p2j p3k描述的是载体的b系相对于t系的角位置,即可认为是载体从b系到t系是又一次等效转动形成的,视为载体的定点转动,而q涵盖此次旋转的全部信息。利用α转角的三角函数可以得出规范化的四元素为:
[0059][0060]
可得到姿态角:
[0061][0062]
此外,可基于加速度计进行姿态解算,对于静止状态下物体,其加速度计测量得到的三轴加速度数据a
x
,a
y
,a
z
,其矢量和为当地的重力加速度,根据欧拉角的关系,利用即可求得物体的姿态角
[0063]
2、将姿态信息转化为电信号通过集成电路传输
[0064]
加速度计采集到信号,加以陀螺仪获取的姿态信息,经由rs232接口传送到导航计算机。运用matlab进行编程,利用四元素法将载体坐标的信息转换到地理坐标后,将信号进行低通滤波处理,获取到实际所需的信号:
[0065]
加速计测量出的竖直方向的原始信号减去低通滤波法计算出趋势项曲线,所得到去除趋势项后的曲线再经过平均值法去除直流,既可以去除由温度引起的趋势项以及直流量,又可以避免在后期二次积分后发生数值失真和畸变等现象。
[0066]
采集的加速度信号转变为速度或者位移时需要进行一次或二次积分,将积分得出的结果用滑动平均算法拟合出一条趋势线,然后用结果减去所拟合的趋势项从而得到平滑稳定的数据:其中f(x)为实际测得的数据;t0是滑动长度;t代表的是采集信号个数。
[0067]
假设外界角速率为常值,考虑系统机械正交耦合并忽略量级较小的离心力,三轴mems陀螺仪的运动方程为:
[0068][0069]
式中:u
x
,u
r
,u
z
表示3个轴向的控制力,c
xx
,c
yy
,c
zz
为三轴等效阻尼项,k
xx
,k
yy
,k
zz
为三轴等效刚度项;假设机械耦合导致对称的阻尼项c
xy
,c
xz
,c
yz
和刚度项k
xx
,k
yy
,k
zz
;ω
x
,ω
y
,ω
z
是3个轴向的外界角速率。得到三轴mems陀螺仪的无量纲运动方程为:
[0070][0071]
写成向量形式为:其中
[0072][0073]
上述陀螺仪和加速度计结合确定姿态的原理框图如图3所示。
[0074]
控制目标变为:设计合适的控制律让陀螺3个轴向跟踪不同频率的正弦信号,同时实时预估并补偿闭环系统的不匹配干扰。
[0075]
3、基于计算机pci总线以dsp fpga架构建立六自由度运动控制系统
[0076]
六自由度运动控制硬件系统各模块电路包括:核心处理器dsp模块(dsp电源、基于锁相环的时钟、jtag仿真接口和外部接口);协处理器fpga模块(fpga电源和配置电路);与pc机接口的pci模块(连接器接口选型、pci9052串行eeprom配置、pci9052数据传输电路以及pci模块);外围接口模块(轴脉冲输出电路、编码器差分输入电路和通用数字10信号电路)。
[0077]
设计的六自由度运动控制系统主要由ti公司新型浮点型芯片tms320f28335、altera公司ep1k50可编程逻辑控制fpga芯片和plx公司pci9052接口芯片组成。系统功能框图如图4所示,其中,pci9052接口芯片作为桥芯片用来对复杂的pci总线协议进行转换,实现pci局部总线与pci用户设备之间的连接。fpga芯片接收ep1k50接口芯片局部总线端传递过来的指令和数据,经过内部逻辑处理后发送给dsp芯片tms320f28335进行运动控制算法处理,同时将有用信息反馈给pci局部总线,并且控制外围接口模块等。dsp芯片tms320f28335负责处理各种运动控制算法(粗插补、位置和速度)。运动控制系统可以用于控制步进电机和全数字伺服电机,板卡根据上位机的命令产生脉冲序列,利用所产生的脉冲个数、频率以及频率变化率分别控制电机的位置、速度及加速度指令。
[0078]
4、误差矫正:
[0079]
误差主要有以下两个方面:一方面是惯性元件自身的误差,另一个方面是在元件
集成时产生的误差。传感器中存在的零偏误差、比例因子、安装误差系数和灵敏度轴非正交性误差等因素,建立线性误差模型,根据载体坐标系下的输出和imu传感器的输出拟合计算各项误差系数,利用误差系数将传感器坐标系下的原始数据标定为较精确的载体坐标系下的数据。
[0080]
①
三轴陀螺仪的误差通常包括零偏、灵敏度误差、非正交误差、随机漂移等。将三轴mems陀螺仪的误差模型简化为式:
[0081][0082]
ω=(ω
1 ω
2 ω3)
t
为载体角速度的准确值,为陀螺仪测得的角速度。三轴陀螺仪的各种误差均包含于矩阵k=(k
ij
)3×3与矢量b=(b
1 b
2 b3)
t
中。利用叉积法标定陀螺仪,通过叉积标定法的积分形式(u为参考系中某个固定不变的矢量):
[0083][0084]
将陀螺仪的各误差系数完全分离出来,由于传感器误差模型是线性的,故可以利用最小二乘法拟合该模型求取各项误差系数,结合上式,即可求出标定后的传感器数据。
[0085]
②
在acex 1k系列fpga内部设计能够使运动控制误差减小的模块,包括精插补模块、编码器反馈模块、计数器模块、通用数字io接口模块和双口ram模块等。并在运动平台上安装光栅尺,用于检测平台的实际位置,并反馈给运动控制卡。运动控制系统根据反馈信号随时调整发给电动机驱动器的信号,旋转编码器将电动机产生的误差反馈到电动机驱动器,而其传动机构、运动平台和负载产生的各种误差都即时反馈到运动控制卡中,能立即得到补偿使运动平台的误差始终控制在精度范围以内(全闭环控制系统方框图如图5所示)。
[0086]
5、六自由度座椅的核心机械结构设计:
[0087]
座椅姿态控制的核心装置采用“六连杆作动”的机械结构,由座椅平台、固定平台、铰链组件以及电动缸、伺服电机组成,装置结构示意图如图6所示。
[0088]
座椅平台随电动缸运动,固定平台通过螺栓固连在地面(机舱),起支撑固定作用,座椅平台和固定平台与6组电动缸的上下两端铰链组件相连接,铰接点均匀分布在大小不同的圆上,构成六边形。座椅平台与电动缸连杆通过两两相连的铰链组件构成6个万向节铰接点,固定平台与电动缸通过两两相连的铰链组件构成6个万向节铰接点,连杆与电动缸构成6个移动副。
[0089]
将加速度传感器以及三轴陀螺仪安装在座椅平台底面中央位置以获取姿态信息,通过接线连接至机械结构外部的控制芯片,并控制电动缸的动作,使得座椅平台随外部飞行器姿态的变化而调整,保证座椅平台的稳定性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

