一种基于三维摇杆的vr下肢控制器及其控制方法
技术领域
1.本发明涉及一种vr游戏外设装置,属于游戏娱乐设备技术领域,尤其是指一种基于三维摇杆的vr下肢控制器及其控制方法。
背景技术:
2.vr游戏以其真实的沉浸式体验吸引着众多玩家。在现有的vr游戏设备中,对于人体上半身肢体的动作捕捉技术较为完善;虽然也有用于下半身动作捕捉的技术,比如htc开发的vive tracker,但是一方面在游戏中站立或跑动过久容易导致疲劳,另一方面受到空间限制,与之伴随的全空间移动输入问题并没有得到实质性解决;体力和空间两方面大大限制了家用vr的体验舒适性和普及。
3.目前看来,想要在家舒适并且长时间游玩vr,最好的姿势还是坐姿,但是现在很少有在坐姿下控制腿部姿态的技术,使得坐姿下玩家对角色的操控少了些自由和乐趣。
技术实现要素:
4.本发明的目的在于克服现有技术中的缺陷与不足,提供一种基于三维摇杆的vr下肢控制器及其控制方法,不仅可实现vr游戏角色髋关节三个自由度和膝关节一个自由度的间接控制,还通过特定步骤解决全空间移动输入的问题。
5.要让玩家采用坐姿玩vr时控制腿部姿势,并不是简单地控制各个关节的旋转角,而是要尽量保证操纵的逻辑与真实情况相同;因为在现实中,我们通常是先想着我们的脚要踩到哪里,进而自然而然地控制自己的下肢各关节的旋转角,而不是先想着自己要把关节旋转多少度,来让脚踩到那里,这有些类似于机器人控制中的逆运动学。
6.本发明的好处是对下肢的操纵符合人的逻辑思维顺序,保留了一定真实性的同时,操纵更为舒适,且所需空间极小,不会出现电线缠绕问题,更适合在家长时间玩vr时使用。
7.为了实现上述目的,本发明按照以下技术方案实现。
8.一种基于三维摇杆的vr下肢控制器,包括有底座,位于底座上方的三维摇杆电位器,复位模块,传感模块,位于三维摇杆上方的踏板;所述踏板通过第一转动轴与三维摇杆相连,所述踏板四周被挡板包围,侧方挡板间连接有松紧带。
9.进一步,所述传感模块至少包括一个压力传感器。
10.进一步,所述复位模块至少包括一个弹簧。
11.进一步,三维摇杆侧方有凹槽,凹槽中装有滑块,上下槽面中至少有一侧装有传感模块,复位模块位于传感模块和滑块之间;所述踏板下方前侧装有第二转动轴,并通过连杆连接滑块和踏板。
12.为了解决上述技术问题,以下还提供了一种vr下肢控制器的控制方法,包括以下步骤。
13.将人体下半身视为由下躯干,左右大腿,左右小腿和左右脚的多刚体结构,其中将
人体下躯干的随动坐标系视为人体中心系,将小腿和脚部视为一整个体系,其随动坐标系简称小腿系,脚踝、膝盖以及对应的髋关节作为定位点,大腿位姿根据膝盖和髋关节定位点的位置即可确定;其他部位的动作输入都视为相对人体中心系的变化。
14.上位机接收左右腿下肢控制器的输入数据。
15.判断腿是否处于约束状态。
16.若为非约束状态:根据平移输入数值进行小腿系平移;小腿系径向修正,x轴修正,膝盖定位点修正;根据旋转输入数值进行小腿系绕轴旋转;小腿系绕轴修正;确定大腿位姿。
17.若为约束态: 根据平移和旋转输入数值,人体中心进行反向平移和旋转;人体中心径向修正;小腿系原点平移至原本位置;小腿系x轴修正,下盖定位点修正,绕轴修正,脚掌位姿修正;确定大腿位姿。
18.左腿和右腿执行完上述判断程序及相应后续指令后,若两条腿都处于非约束态,则人体中心在重力和空气阻力下自由平移。
19.最后进入腿的约束状态转化阶段:非约束腿触碰游戏中角色可以站立的地方则变为约束腿;约束腿若其脚踝关节点相距对应的髋关节点大于设定的最大值,或者在另一只腿也为约束腿的前提下接收到的向上指令大于设定的数值,则变为非约束腿。
20.通过上述步骤,在控制腿部位姿同时,可以进而控制上位机游戏角色人体中心的前后平移、左右平移、左右旋转、向上跳跃或向下蹲。
21.本发明与现有技术相比,其有益效果如下。
[0022] 1、以较为方便和符合人们逻辑顺序的方法实现了下肢四自由度的控制,并通过特定步骤使人体中心坐标系实现三自由度的平移和绕自身竖直轴的旋转,解决了虚拟现实中坐姿下腿部位姿控制问题和全空间平移问题。
[0023]
2、填补了vr游戏领域坐姿移动输入的低成本方案,由于每个外设装置设备体积比较小,节省大量空间,且不会发生绕线问题,从而使家用vr更加普及成为可能。
[0024]
为了能更清晰的理解本发明,以下将结合附图说明详细阐述本发明的具体实施方式。
附图说明
[0025]
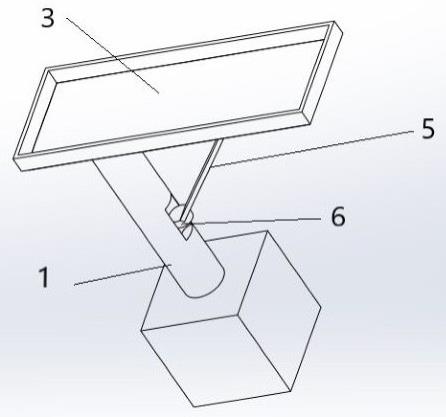
图1、图2是本发明的立体结构示意图。
[0026]
图3是本发明的单腿逻辑结构图。
具体实施方式
[0027]
如图1、图2所示,本发明所述vr下肢控制器,包括有底座,位于底座上方的三维摇杆电位器1,复位模块,传感模块,位于三维摇杆1上方的踏板3;所述踏板3通过第一转动轴2与三维摇杆1相连,所述踏板3四周被挡板7包围,侧方挡板间连接有松紧带。
[0028]
本实施例中,传感模块选用两个压力传感器,复位模块选用两个弹簧。
[0029]
进一步,三维摇杆1侧方有凹槽,凹槽中装有滑块6,上下槽面中各装有压力传感器,弹簧位于压力传感器和滑块6之间;所述踏板3下方前侧装有第二转动轴4,并通过连杆5连接滑块6和踏板3。
[0030]
本下肢控制器使用时左右脚各用一个。
[0031]
上述vr下肢控制器在使用时通过数据线与上位机连接,其控制方法如下。
[0032]
在本实施例中,人体中心系原点位于人体站姿下的重心,y轴正向为脊柱朝向。
[0033]
在本实施例中,把小腿视作圆柱,脚掌视作长方体;小腿系的原点为脚踝,y轴正向经过膝盖,x轴正向经过脚尖(此时脚掌长方体的上下平面垂直于小腿圆柱体轴线)。
[0034]
在本实施例中,下躯干相当于身体其他部位的父物体,即人体中心系的移动或旋转会带动小腿系等的移动或旋转,而小腿系的移动或旋转不会对人体中心系产生影响。
[0035]
下面将参考图3,对本发明的单腿逻辑结构进行详细描述。
[0036]
记录两个小腿系原点和人体中心系原点的初始位置。
[0037]
接收输入数据,具体的:以右腿为例,每一个固定帧得到x,y,z,r四个数值,分别对应摇杆前后移动,踏板上下转动,摇杆左右移动,摇杆绕竖直轴旋转;将原本位置设置为零点,偏移原本位置的有向距离对应输入数值,并根据实际情况对四个数值进行放缩。
[0038]
判断腿是否为约束态,若为非约束态,执行以下步骤。
[0039]
小腿系平移,具体的:根据x,y,z的数值,将小腿系沿自身x,y,z轴平移相应距离。
[0040]
小腿系径向修正,具体的:把起点为髋关节,终点为脚踝的向量记作ha;若ha模长小于所设定的最短距离,则小腿系原点沿ha正向平移,使得ha模长等于所设定的最短距离;若ha模长大于所设定的最长距离(即超过大腿小腿长度之和)则小腿系原点沿ha反向平移,使得ha模长等于所设定的最长距离。
[0041]
将脚踝点控制在人体下半身,具体的:计算ha在人体中心系y轴正向的投影,若大于给定的负数,则小腿系原点沿人体中心系y轴负向平移,使得ha在人体中心系y轴正向的投影等于给定的负数。
[0042]
接下来的过程中保持小腿系原点位置不变。
[0043]
小腿系x轴修正,具体的:根据大腿长度和小腿长度,以及此时ha模长,通过余弦定理可得小腿系x轴正向单位向量(以下简称小腿系x轴)与ha应当保持的夹角的余角,把ha与小腿系x轴叉乘向量(记作向量ao)作为旋转轴,使小腿系x轴绕ao转至相应位置。
[0044]
小腿系膝盖定位点修正,具体的:计算小腿系y轴与ao的夹角 ,将小腿系绕自身x轴旋转上述计算所得夹角的余角,使得小腿系y轴与ao垂直。
[0045]
小腿系绕轴旋转,具体的:根据r的数值,将小腿系绕ha旋转相应角度。
[0046]
小腿系绕轴修正,具体的:计算小腿系x轴在垂直于ha的平面上的投影(记为bc),记ha与人体中心系z轴(即身体横向)单位向量叉乘所得向量为中央向量。若bc与中央向量夹角大于特定角度(这里设为60度),将小腿系绕ha旋转,直到bc与中央向量夹角控制在特定角度以内,使得下肢不会出现脚尖指向身后等错误姿势;至此小腿系的相对人体中心系的4个自由度完全确定。
[0047]
根据膝盖点以及髋关节点的位置,可以确定大腿姿态。
[0048]
若为约束态,执行以下步骤。
[0049]
人体中心系反向平移和旋转,具体的:根据x,y,z的数值将人体中心系沿自身坐标系x,y,z轴反向平移相应距离,根据r的数值,将人体中心系绕自身y轴反向旋转相应角度。
[0050]
人体中心系径向修正,具体的:把起点为髋关节,终点为原本脚踝位置的向量记作ha;接下去步骤与小腿系径向修正后面步骤几乎相同,只是移动的不再是小腿系原点,而是
人体中心系的原点。
[0051]
如果约束时间大于预先设定的值,这里值为0.1s,则记录人体中心系的平移速度,否则上述速度清零。
[0052]
小腿系原点平移至原本位置。
[0053]
小腿系x轴修正,膝盖定位点修正,绕轴旋转,绕轴修正,具体步骤与非约束态中同名步骤所述相同。
[0054]
脚掌位姿修正,具体的:调整足部y轴(垂直于脚掌面的轴线),使之与着地点平面法线相同。
[0055]
确定大腿姿态。
[0056]
上述判断完成后,如果两只腿都为非约束态,人体中心系在重力和阻尼作用下平移运动。
[0057]
结束固定帧后,进入腿的约束状态转化阶段,下面将对本发明的腿的约束状态转化逻辑结构进行详细描述。
[0058]
若两只腿都位于约束状态:约束时间增加;左右小腿系原点都平移至原本位置;若其中一只腿接收的向上指令大于设定的数值(即y的数值大于某一正数)且强于另一只腿所收到向上指令,则变为非约束态,并且向上移动一小段距离;若两个小腿系ha的模长都大于设定的最大值,同时变为非约束态。
[0059]
若有且仅有一只腿位于约束态:约束时间增加;非约束腿若触碰游戏中角色可以站立的地方(如地面,楼梯等)变为约束态;约束腿若对应ha的模长大于设定的最大值,则变为非约束态。
[0060]
若两只腿都位于非约束态:约束时间清零;腿若触碰游戏中角色可以站立的地方则变为约束态。
[0061]
结合单腿逻辑结构和约束腿转化逻辑结构,可实现人体中心系的三自由度平移以及绕自身y轴旋转。
[0062]
此外,本下肢控制器还可以通过外部按键转化为驾驶模式,直接控制游戏角色中心的平移或旋转,类似于普通的摇杆输入方法。
[0063]
本发明并不局限于上述具体实施方式,如果对本发明的各种改动或变型不脱离本发明的精神和范围,倘若这些改动和变型属于本发明的权利要求和等同技术范围之内,则本发明也意图包含这些改动和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

