1.本发明涉及神经外科康复的技术领域,具体为一种用于神经外科的康复训练装置。
背景技术:
2.神经外科是外科学中的一个分支,是在外科学以手术为主要治疗手段的基础上,应用独特的神经外科学研究方法,研究人体神经系统,如脑、脊髓和周围神经系统,以及与之相关的附属机构,如颅骨、头皮、脑血管脑膜等结构的损伤、炎症、肿瘤、畸形和某些遗传代谢障碍或功能紊乱疾病,如:癫痫、帕金森病、神经痛等疾病的病因及发病机制,并探索新的诊断、治疗、预防技术的一门高、精、尖学科。神经外科是主治由于外伤导致的脑部、脊髓等神经系统的疾病,例如脑出血出血量危及生命,车祸致脑部外伤,或脑部有肿瘤压迫需手术治疗等。
3.在脊髓神经系统疾病的康复过程中,需要进行适当的锻炼以促进康复,需要使用到训练装置。目前市面上存在着专门的训练装置,但是存在如下缺点:1、锻炼效果差、患者不能根据自身情况进行灵活调节、适用性差;2、没实现自动化的功能,不便于使用、精度低;3、占用空间大,不便于存放;4、在训练的过程中,无法夹持住患者的双臂,患者存在掉落的安全隐患。
技术实现要素:
4.本发明的目的是为了提供一种用于神经外科的康复训练装置,以解决锻炼效果差、患者不能根据自身情况进行灵活调节、适用性差;没实现自动化的功能,不便于使用、精度低;占用空间大,不便于存放;在训练的过程中,无法夹持住患者的双臂,患者存在掉落的安全隐患的问题。
5.为了实现上述发明目的,本发明采用了以下技术方案:一种用于神经外科的康复训练装置,包括底板、背靠板和腿托板,所述底板水平分布,所述背靠板、腿托板均倾斜分布,所述背靠板、腿托板的内端均和底板的顶面之间转动连接,所述底板的顶面左端安装有角度传感器和第一电机,所述第一电机的输出轴通过联轴器连接有第一螺杆,所述第一螺杆的轴线沿着底板的长度方向分布,所述第一螺杆上螺纹连接有第一移动板,所述第一移动板沿着底板的前、后宽度方向分布,所述第一移动板的两端均设有第一滑动杆,所述第一滑动杆滑动设置在底板的顶面的滑槽内,所述第一滑动杆上转动设有支撑机构,所述支撑机构的顶端和背靠板的底面活动连接;所述支撑机构包括第一支撑杆、第一支撑套、弹性件、铰接球和条形槽,所述第一支撑杆的底端和第一滑动杆转动连接,所述条形槽开设在背靠板的底面上,所述铰接球活动设置在条形槽内,所述第一支撑套的顶端和铰接球的底面固定连接,所述第一支撑杆的顶端插入到第一支撑套的底端内腔里,所述弹性件设置在第一支撑杆的顶端和第一支撑套的内腔顶端之间;
所述背靠板的底端开设有滑动腔,所述滑动腔内滑动设有两个滑块,两个所述滑块之间设有第一弹簧,所述滑块和所述滑动腔的侧壁之间设有第二弹簧,所述底板、背靠板之间的连接转轴上转动设有套环,所述套环的外壁上固定有支杆,所述支杆的顶端和滑块之间转动连接。
6.优选的,所述背靠板的顶面设有夹持机构,所述夹持机构用于夹持住患者的双臂。
7.优选的,所述夹持机构包括收纳槽、两个夹持杆和一个夹持弹簧,所述收纳槽开设在背靠板的顶面上;所述夹持杆包括第一夹持端和第二夹持端,所述第一夹持端、第二夹持端呈l型结构且一体成型,所述第一夹持端和第二夹持端的中间过渡位置处开设有滑动槽口,所述背靠板的顶面的铰接座的转轴滑动设置在滑动槽口内,两个所述第一夹持端之间转动连接;所述夹持弹簧设置在两个第一夹持端的内端底面之间,所述夹持弹簧位于收纳槽的正上方,当所述第一夹持端被患者的背部向下压平时,所述夹持弹簧被收纳于收纳槽的内部;当患者的背部躺在两个所述第一夹持端的顶面上时,两个第一夹持端同时向下旋转,所述背靠板的顶面的铰接座的转轴相对于滑动槽口进行滑动,两个所述第一夹持端向下旋转同时分别带动两个第二夹持端向上旋转,从而两个所述第二夹持端挡住患者的双臂,同时,所述夹持弹簧被收纳于收纳槽的内部;当患者训练完毕起身后,两个所述第一夹持端的顶面的压力消失,在所述夹持弹簧的弹力作用下,两个所述第一夹持端相对旋转并恢复到初始位置,同时,所述第一夹持端带动第二夹持端向外旋转。
8.优选的,所述底板的顶面右端上安装有第二电机,所述第二电机的输出轴上通过联轴器连接有第二螺杆,所述第二螺杆的轴线沿着底板的长度方向分布,所述第二螺杆上螺纹连接有第二移动板,所述第二移动板的两端均设有第二滑动杆,所述第二滑动杆和底板的顶面右端的第二滑槽之间滑动连接,所述第二滑动杆上转动设有斜撑杆,所述斜撑杆的顶端和腿托板的底面之间转动连接。
9.优选的,所述底板的后侧通过安装杆设有控制器,所述控制器和第一电机、角度传感器、第二电机之间通过导线电性连接;在使用过程中,用户可以通过所述控制器来控制第一电机、角度传感器和第二电机,具体的,通过所述控制器来控制第一电机的正反向旋转,从而调节所述背靠板的倾斜角度,通过所述控制器来启动角度传感器,所述角度传感器把检测的数据传输给控制器,用户可以实时掌握背靠板相对于底板的倾斜角度,通过所述控制器来控制第二电机的正反向旋转,从而调节所述腿托板相对于底板的倾斜角度。
10.与现有技术相比,采用了上述技术方案的用于神经外科的康复训练装置,具有如下有益效果:一、使用时,患者躺在背靠板上并把腿部放置在腿托板上,背靠板支撑起患者的背部和臀部,腿托板支撑起患者的大腿,当启动第一电机时,第一电机的输出轴旋转并带动第一螺杆绕自身轴线旋转,第一螺杆带动第一移动板沿着第一螺杆的长度方向移动,第一移动板带动支撑机构的底端移动,可以改变支撑机构的倾斜角度,从而调节背靠板的倾斜角度,患者能够根据自己的需求进行调节作业,使用灵活便捷;二、当患者锻炼完毕后可以通过旋转第一电机的输出轴来把第一移动板移动到最
左端位置处,同时把铰接球保持在条形槽的底端内,然后向下旋转背靠板并使得第一支撑杆、第一支撑套被收纳在条形槽的内部,使得背靠板的底面紧贴躺平在底板的左端顶面上,从而减小训练装置的占用空间,便于存放;三、在使用的过程中,当患者背部、臀部躺在背靠板上后,通过背部给背靠板施加一定的旋钮力度,背靠板被旋钮偏转一定角度,此时,背靠板带动滑块偏转一定角度,滑块相对于支杆进行旋转,此间,两个滑块均在滑动腔内发生滑动,第一弹簧被拉长的同时两个第二弹簧被压短,以适应背靠板的偏转动作,背靠板被旋钮偏转能够锻炼患者的脊椎和背部肌肉,从而刺激神经,利于神经外科疾病的康复;四、当患者的背部躺在两个第一夹持端的顶面上时,两个第一夹持端同时向下旋转,此时,夹持弹簧被迫拉长并储蓄弹性势能,同时,背靠板的顶面的铰接座的转轴相对于滑动槽口进行滑动,以适应第一夹持端的向下旋转的动作,两个第一夹持端向下旋转同时分别带动两个第二夹持端向上旋转,从而两个第二夹持端挡住患者的双臂,避免患者在康复训练的过程中意外掉落,确保安全使用。
附图说明
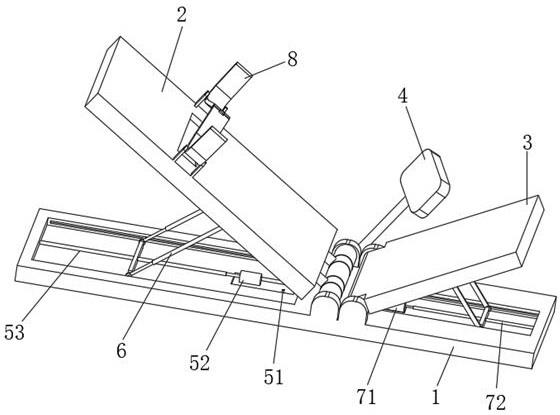
11.图1为本发明用于神经外科的康复训练装置实施例的立体图。
12.图2为实施例的立体图(另一视角)。
13.图3为实施例的图2中a处放大图。
14.图4为实施例的主视图。
15.图5为实施例的图4中b 处放大图。
16.图6为实施例的立体图(另一视角)。
17.图7为实施例二中夹持机构的主视图。
具体实施方式
18.下面结合附图对本发明做进一步描述。
19.实施例一:如图1
‑
2所示的用于神经外科的康复训练装置,包括底板1、背靠板2和腿托板3,底板1水平分布,其中,底板1为长条形板状结构,背靠板2、腿托板3均倾斜分布,背靠板2、腿托板3的内端均和底板1的顶面之间通过转动轴转动连接,底板1的顶面左端安装有角度传感器51和第一电机52,且角度传感器51位于第一电机52的右侧位置处,第一电机52的输出轴通过联轴器连接有第一螺杆53,第一螺杆53的轴线沿着底板1的长度方向分布,其中,第一螺杆53和底板1之间通过轴承转动连接,第一螺杆53上螺纹连接有第一移动板54,第一移动板54沿着底板1的前、后宽度方向分布,第一移动板54的两端均设有第一滑动杆55,第一滑动杆55滑动设置在底板1的顶面的滑槽内,第一滑动杆55上转动设有支撑机构6,支撑机构6的顶端和背靠板2的底面活动连接。
20.使用时,患者躺在背靠板2上并把腿部放置在腿托板3上,背靠板2支撑起患者的背部和臀部,腿托板3支撑起患者的大腿,当启动第一电机52时,第一电机52的输出轴旋转并带动第一螺杆53绕自身轴线旋转,在第一螺杆53和第一移动板54之间螺纹连接的作用下,第一螺杆53带动第一移动板54沿着第一螺杆53的长度方向移动,同时,第一螺杆53带动其
两端的第一滑动杆55在底板1的顶面的滑槽内滑动,具备导向作用,利于第一移动板54的稳定移动,第一移动板54带动支撑机构6的底端移动,可以改变支撑机构6的倾斜角度,从而调节背靠板2的倾斜角度,患者能够根据自己的需求进行调节作业,使用灵活便捷。
21.如图4
‑
6所示,支撑机构6包括第一支撑杆61、第一支撑套62、弹性件63、铰接球64和条形槽65,第一支撑杆61的底端和第一滑动杆55转动连接,具体的,第一支撑杆61的底端和第一滑动杆55之间通过转动块连接,其中,转动块能够绕第一滑动杆55的轴线旋转,条形槽65开设在背靠板2的底面上,其中,条形槽65的数量为两个,两个条形槽65分别分布在背靠板2的底面前、后两侧上,铰接球64活动设置在条形槽65内,其中,铰接球64能够在条形槽65内滑动,第一支撑套62的顶端和铰接球64的底面固定连接,第一支撑杆61的顶端插入到第一支撑套62的底端内腔里,弹性件63设置在第一支撑杆61的顶端和第一支撑套62的内腔顶端之间,其中,弹性件63采用矩形螺旋弹簧,矩形螺旋弹簧沿着第一支撑套62的内腔的长度方向分布。
22.在使用的过程中,当患者背部靠在背靠板2的顶面上时,患者上半身的重力压在背靠板2的顶面上,背靠板2向斜下压紧铰接球64,铰接球64压紧第一支撑套62,第一支撑套62的内腔和第一支撑杆61的顶端共同压紧弹性件63,弹性件63被压缩变形,具备缓冲一定的缓冲作用,同时,第一支撑杆61的顶端相对于第一支撑套62的内腔向上移动,也即支撑机构6的总长度变短,同时,第一支撑杆61的底端在转动块的作用下相对于第一滑动杆55进行旋转,以适应支撑机构6的长度变短的情形,此外,第一支撑套62顶端的铰接球64在条形槽65的底端可以进行万象旋转,以适应第一支撑套62的倾斜旋转的情形,最后,当患者锻炼完毕后可以通过旋转第一电机52的输出轴来把第一移动板54移动到最左端位置处,同时把铰接球64保持在条形槽65的底端内,然后向下旋转背靠板2并使得第一支撑杆61、第一支撑套62被收纳在条形槽65的内部,使得背靠板2的底面紧贴躺平在底板1的左端顶面上,从而减小训练装置的占用空间,便于存放。
23.如图3所示,背靠板2的底端开设有滑动腔,其中,滑动腔沿着背靠板2的前、后宽度方向分布,滑动腔内滑动设有两个滑块93,滑块93采用正方体型结构的块体,两个滑块93之间设有第一弹簧94,滑块93和滑动腔的侧壁之间设有第二弹簧95,其中,第二弹簧95的数量为2个,两个第二弹簧95分别分布在两个滑块93的两侧位置处,第一弹簧94、第二弹簧95均为矩形螺旋弹簧,底板1、背靠板2之间的连接转轴上转动设有套环91,套环91的数量为两个,套环91的外壁上固定有支杆92,支杆92的顶端和滑块93之间转动连接,其中,支杆92的数量为两个,支杆92的轴线和背靠板2的顶面互相平行。
24.在使用的过程中,当患者背部、臀部躺在背靠板2上后,通过背部给背靠板2施加一定的旋钮力度,背靠板2被旋钮偏转一定角度,此时,背靠板2带动滑块93偏转一定角度,滑块93相对于支杆92进行旋转,此间,两个滑块93均在滑动腔内发生滑动,第一弹簧94被拉长的同时两个第二弹簧95被压短,以适应背靠板2的偏转动作,背靠板2被旋钮偏转能够锻炼患者的脊椎和背部肌肉,从而刺激神经,利于神经外科疾病的康复,当患者背部恢复到初始位置时,在第一弹簧94、第二弹簧95的弹力共同作用下,两个滑块93恢复到初始位置,以适应患者连续锻炼的要求,此外,套环91能够绕底板1、背靠板2之间的连接转轴作周向旋转,套环91能够带动支杆92、滑块93绕连接转轴旋转,从而适应背靠板2相对于底板1的角度的调整。
25.如图2所示,底板1的顶面右端上安装有第二电机71,第二电机71的输出轴上通过联轴器连接有第二螺杆72,第二螺杆72的轴线沿着底板1的长度方向分布,其中,第二螺杆72的右端通过轴承和底板1的右端转动连接,第二螺杆72上螺纹连接有第二移动板73,其中,第二移动板73沿着底板1的前、后宽度方向分布,第二移动板73的两端均设有第二滑动杆,第二滑动杆和底板1的顶面右端的第二滑槽之间滑动连接,第二滑动杆上转动设有斜撑杆74,斜撑杆74的顶端和腿托板3的底面之间转动连接。
26.使用时,启动第二电机71,第二电机71的输出轴带动第二螺杆72旋转,在第二螺杆72和第二移动板73之间螺纹连接的作用下,第二移动板73沿着第二螺杆72的长度方向移动,第二移动板73带动斜撑杆74的底端移动,同时,斜撑杆74的顶端相对于腿托板3的底面转动,也即斜撑杆74的倾斜角度发生变化,从而改变腿托板3相对于底板1的倾斜角度,患者可以根据自身的需求来进行调节,使用灵活便捷。
27.如图1
‑
3所示,底板1的后侧通过安装杆设有控制器4,控制器4和第一电机52、角度传感器51、第二电机71之间通过导线电性连接。使用过程中,用户可以通过控制器4来控制第一电机52、角度传感器51和第二电机71,具体的,通过控制器4来控制第一电机52的正反向旋转,从而调节背靠板2的倾斜角度,通过控制器4来启动角度传感器51,角度传感器51把检测的数据传输给控制器4,用户可以实时掌握背靠板2相对于底板1的倾斜角度,并记忆住数据以便于下次锻炼时调节角度,通过控制器4来控制第二电机71的正反向旋转,从而调节腿托板3相对于底板1的倾斜角度,最后,通过控制器4来进行控制,提高作业精度,自动化作业,减轻劳动强度。
28.实施例二:本实施例相对于实施例一的不同之处在于:如图2、7所示,背靠板2的顶面设有夹持机构8,夹持机构8用于夹持住患者的双臂。具体而言,夹持机构8包括收纳槽81、两个夹持杆和一个夹持弹簧85,收纳槽81开设在背靠板2的顶面上,其中,收纳槽81的横截面为长方形结构;夹持杆包括第一夹持端82和第二夹持端83,第一夹持端82、第二夹持端83呈l型结构且一体成型,第一夹持端82和第二夹持端83的中间过渡位置处开设有滑动槽口84,背靠板2的顶面的铰接座的转轴滑动设置在滑动槽口84内,两个第一夹持端82的内端之间转动连接;夹持弹簧85设置在两个第一夹持端82的内端底面之间,夹持弹簧85位于收纳槽81的正上方,当第一夹持端82被患者的背部向下压平时,夹持弹簧85被收纳于收纳槽81的内部。
29.在使用的过程中,当患者的背部躺在两个第一夹持端82的顶面上时,两个第一夹持端82同时向下旋转,此时,夹持弹簧85被迫拉长并储蓄弹性势能,同时,背靠板2的顶面的铰接座的转轴相对于滑动槽口84进行滑动,以适应第一夹持端82的向下旋转的动作,两个第一夹持端82向下旋转同时分别带动两个第二夹持端83向上旋转,从而两个第二夹持端83挡住患者的双臂,避免患者在康复训练的过程中意外掉落,确保安全使用,此间,夹持弹簧85被收纳于收纳槽81的内部,具有避位的作用,避免背靠板2的顶面抵挡住夹持弹簧85;当患者训练完毕起身后,两个第一夹持端82的顶面的压力消失,在夹持弹簧85的弹力作用下,两个第一夹持端82相对旋转并恢复到初始位置,便于下次的锻炼作用,同时,第一夹持端82带动第二夹持端83向外旋转,便于患者起身。
30.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,
任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

