1.本实用新型涉及用于桶盖旋拧的自动夹爪机构,属于自动化产线中桶盖装卸自动机构的技术领域。
背景技术:
2.在灌装等自动化产线中,会涉及到对吨桶的桶盖旋拧装载或旋拧拆卸作业,因此需要设计满足旋转驱动的爪手机构,从而满足抓持旋转作业需求。
3.现有技术中的自动旋拧机构采用旋转驱动源与专用爪头设计,专用爪手设置在旋转驱动源的旋转轴上,而专用爪头采用盖帽式结构或者卡盘结构,通过内部滑块线性位移驱动实现径向夹紧锁固,其存在一定地定径范围,并且滑块位移行程有限,适用尺寸范围较小,同时无法满足矩阵分布平铺料的自动化夹取料使用,仅满足叠料自动化拾取。
4.另外,传统自动夹爪机构存在旋转驱动源与爪手驱动源的空间干涉,导致旋拧夹爪机构的体积较大,周转耗能较高。
技术实现要素:
5.本实用新型的目的是解决上述现有技术的不足,针对传统旋拧自动夹爪机构存在空间布置不合理及通用性较差的问题,提出用于桶盖旋拧的自动夹爪机构。
6.为了达到上述目的,本实用新型所采用的技术方案为:
7.用于桶盖旋拧的自动夹爪机构,包括载架主体,所述载架主体的底部设有夹爪机构、顶部设有升降驱动源,
8.所述夹爪机构包括具备旋转驱动源的夹爪桩轴和位于所述夹爪桩轴底部的夹爪驱动环,所述夹爪桩轴上设有周向均匀分布的至少三个与所述夹爪桩轴相枢轴配接的夹爪体,任一所述夹爪体与所述夹爪驱动环之间设有枢轴摇臂,所述枢轴摇臂分别与所述夹爪体和所述夹爪驱动环相枢轴配接,
9.所述升降驱动源具备贯穿所述载架主体及所述夹爪桩轴与所述夹爪驱动环相配接的伸缩驱动端,所述伸缩驱动端与所述夹爪驱动环之间周向活动且轴向锁固。
10.优选地,所述旋转驱动源设置在所述载架主体上,并且所述旋转驱动源设有贯穿所述载架主体的旋转驱动端,所述旋转驱动端与所述夹爪桩轴之间相传动配接。
11.优选地,所述旋转驱动端与所述夹爪桩轴之间为传动带传动配接或齿啮合配接。
12.优选地,任意所述夹爪体的自由端设有弯折夹持部,所述弯折夹持部上设有凸起的夹持端。
13.优选地,所述夹持端呈v型结构。
14.优选地,所述夹持端的表面设有柔性层。
15.优选地,所述载架主体包括用于装载在运转机构上的立架,所述立架与所述载架主体形成l型载座结构。
16.优选地,所述立架与所述载架主体之间设有相间隔的两个加强筋板。
17.优选地,所述加强筋板之间设有用于承载所述升降驱动源的载板,所述升降驱动源的伸缩驱动端贯穿所述载板。
18.本实用新型的有益效果主要体现在:
19.1.满足对吨桶桶盖自动旋拧作业需求,易于搭载在各类吨桶的自动化产线中,同时夹爪机构满足各类规格尺寸的桶盖配合需求,适用范围较广。
20.2.通过升降驱动源与旋转驱动源的分离式设计,满足空间利用率需求,降低了机构成本,体积及重量得到有效控制。
21.3.具备弯折夹持部设计,能利用整列桶盖之间间隙进行拾放料作业,满足自动化上下料作业需求。
附图说明
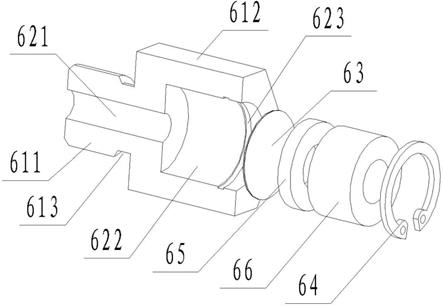
22.图1是本实用新型用于桶盖旋拧的自动夹爪机构的结构示意图。
23.图2是本实用新型用于桶盖旋拧的自动夹爪机构的另一视角结构示意图。
具体实施方式
24.本实用新型提供用于桶盖旋拧的自动夹爪机构。以下结合附图对本实用新型技术方案进行详细描述,以使其更易于理解和掌握。
25.用于桶盖旋拧的自动夹爪机构,如图1和图2所示,包括载架主体1,载架主体1的底部设有夹爪机构2、顶部设有升降驱动源3。
26.夹爪机构2包括具备旋转驱动源4的夹爪桩轴5和位于夹爪桩轴5底部的夹爪驱动环6,夹爪桩轴5上设有周向均匀分布的至少三个与夹爪桩轴5相枢轴配接的夹爪体7,任一夹爪体7与夹爪驱动环6之间设有枢轴摇臂8,枢轴摇臂分别与夹爪体和夹爪驱动环相枢轴配接,升降驱动源3具备贯穿载架主体1及夹爪桩轴5与夹爪驱动环6相配接的伸缩驱动端31,伸缩驱动端31与夹爪驱动环6之间周向活动且轴向锁固。
27.具体地实现过程及原理说明:
28.在进行对桶盖旋拧作业时,通过对载架主体1进行位移使得夹爪机构2与桶盖相对位,此时,通过升降驱动源3将夹爪驱动环6上升作业,此时通过枢轴摇臂8和夹爪体3的枢轴位移转换从而实现对夹爪体7的自由端的夹合驱动,从而满足夹紧桶盖的需求。
29.待夹爪体7夹持稳定后,通过旋转驱动源4驱动夹爪桩轴5旋转从而满足旋拧作业需求,需要说明的是,夹爪体7为摇臂结构,其能提供较大地的夹合行程和轴向行程,满足各类桶盖的夹持锁固需求,通用性非常强,同时夹持稳定性较优。
30.在一个具体实施例中,旋转驱动源4设置在载架主体1上,并且旋转驱动源4设有贯穿载架主体1的旋转驱动端41,旋转驱动端与夹爪桩轴之间相传动配接。
31.即旋转驱动源4和升降驱动源3相隔离开,提高了空间利用率,无需复杂地避让配接即可满足同台搭载需求,并且通过传动配接的方式满足扭矩传递需求。
32.该旋转驱动端41与夹爪桩轴5之间为传动带传动配接或齿啮合配接。当然还可以采用其他的传动配接方式,仅需要满足相传动配接即可。
33.在一个具体实施例中,任意夹爪体7的自由端设有弯折夹持部71,弯折夹持部71上设有凸起的夹持端72。
34.具体地说明,一般情况下,自动夹爪机构要承担夹持旋拧作业和上下料作业,而很多情况下,桶盖为矩阵式平铺供料,通过该弯折夹持部71设计,能穿接在桶盖之间的间隙中,从而利用间隙实现自动上下料。
35.在一个优选实施例中,夹持端呈v型结构。并且夹持端的表面设有柔性层。
36.具体地说明,通过v型结构的夹持端设计,其存在与桶壁相贴合的角端,满足夹持配合需求,同时,采用了柔性层设计,有效防止对桶盖产生夹持损伤。
37.在一个具体实施例中,载架主体1包括用于装载在运转机构上的立架9,立架9与载架主体1形成l型载座结构。
38.即通过立架9满足搭载在机械臂、行架等运转机构上的搭载要求,另外,立架9与载架主体1之间形成搭载空间,满足各驱动源的搭载需求。
39.在一个具体实施例中,立架9与载架主体1之间设有相间隔的两个加强筋板91。加强筋板91之间设有用于承载升降驱动源的载板92,升降驱动源的伸缩驱动端贯穿载板。
40.具体地说明,通过加强筋板91设计,能提高立架9与载架主体1的配接稳定性,同时,通过载板92设计,一方面能提高整体结构稳定性,另外能载架主体1相配合,实现对升降驱动源的伸缩驱动端的线性导向,满足其位移精度需求。
41.通过以上描述可以发现,本实用新型用于桶盖旋拧的自动夹爪机构,满足对吨桶桶盖自动旋拧作业需求,易于搭载在各类吨桶的自动化产线中,同时夹爪机构满足各类规格尺寸的桶盖配合需求,适用范围较广。通过升降驱动源与旋转驱动源的分离式设计,满足空间利用率需求,降低了机构成本,体积及重量得到有效控制。具备弯折夹持部设计,能利用整列桶盖之间间隙进行拾放料作业,满足自动化上下料作业需求。
42.以上对本实用新型的技术方案进行了充分描述,需要说明的是,本实用新型的具体实施方式并不受上述描述的限制,本领域的普通技术人员依据本实用新型的精神实质在结构、方法或功能等方面采用等同变换或者等效变换而形成的所有技术方案,均落在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。