本实用新型涉及电子产品设计技术领域,特别涉及一种开罐器自动停止开罐的装置。
背景技术:
现有技术中,电动式的开罐器又分成2种,一种是顶切功能,另一种是侧切功能。
顶切的开罐器有个特点,就是开罐器刀片要刺穿罐头插入到罐头里面直接接触到里面的食物,切开的后罐头开口处较锋利;当马达带动开罐器刀片转一圈之后,罐头盖子和本体分离,盖子和开罐器刀片一起弹开复位,带动机械开关切断开罐器的马达电源,能让开罐器自动停止。
侧切的开罐器有个特点,就是开罐器刀片从侧边切开罐头的密封边缘或封口包边不会接触到里面的食物,切开的后罐头开口比较平整;但是,当马达转一圈之后,由于没有传动机构能带动马达开关自动弹开,故侧切的开罐器马达无法自动停止,如果没有用户及时停止,重复的侧边切割容易产生锋利的铁屑和披锋毛刺。
技术实现要素:
本实用新型所要解决的技术问题是:提供一种开罐器自动停止开罐的装置,使得侧边开罐器完成开罐的同时避免因重复切割所造成的问题。
为了解决上述技术问题,本实用新型采用的技术方案为:
一种开罐器自动停止开罐的装置,包括控制模块、光电断路器、光栅轮、供电模块、带有轴承的轴承驱动模块和开罐器刀片;
所述控制模块分别与供电模块、所述轴承驱动模块和所述光电断路器电连,所述供电模块同时与所述轴承驱动模块和所述光电断路器电连接,所述光栅轮套接在所述轴承上且所述光栅轮的运动轨迹经过所述光电断路器的光电检测区,所述轴承与所述开罐器刀片固定连接;
所述轴承带动所述光栅轮转动,所述控制模块用于测算开罐过程中所述轴承的转动频率的变化。
进一步地,所述控制模块包括主控芯片和第一电容;
所述第一电容的一端同时与所述主控芯片的供电电压输入引脚和所述供电模块的供电端相连,且另一端与所述主控芯片的接地引脚相连。
进一步地,还包括第一电阻、第二电阻和第二电容;
所述第一电阻的一端与所述主控芯片的第一串行输入输出口相连,且另一端与所述光电断路器的发光二极管正极引脚相连,所述第二电容的一端同时与所述光电断路器的光电三极管的集电极引脚、所述第二电阻的一端和所述主控芯片的第二串行输入输出口相连;
所述第二电阻的另一端与所述供电模块的供电端相连,所述第二电容的另一端、所述光电断路器的发光二极管负极引脚和光电三极管发射极引脚均接地。
进一步地,所述轴承驱动模块包括驱动马达、驱动齿轮、第一三极管、可控硅、第三电阻和第四电阻;
所述第三电阻的一端与所述主控芯片的第三串行输入输出口相连,且另一端与所述第一三极管的基极相连,所述第四电阻的一端与所述第一三极管的集电极相连,且另一端与所述可控硅的电源控制极相连,所述可控硅的正极与所述驱动马达的负极相连,所述驱动马达的正极与所述供电模块的供电端相连;
所述第一三极管的发射极与所述可控硅的负极均接地,所述轴承装配在所述驱动马达上,所述驱动齿轮的一端套接在所述轴承上,且另一端与所述开罐器刀片固定连接,所述第一三极管为npn型。
进一步地,还包括按键开关、第二三极管、第四电阻和第五电阻,所述驱动马达的正极与所述供电模块的供电端相连替换为:
所述按键开关的一端与所述供电模块的供电端相连,且另一端与同时与所述驱动马达的正极和所述第四电阻的一端相连;所述第四电阻的另一端与所述第五电阻的一端相连,所述第五电阻的另一端与所述第二三极管的基极相连,所述第二三极管的集电极与所述主控芯片的第四串行输入输出口相连;
第二三极管的发射极接地,所述第二三极管为npn型。
综上所述,本实用新型的有益效果在于:提供一种开罐器自动停止开罐的装置,控制模块通过光电断路器和光栅轮的配合使用,测算在开罐器开罐过程中轴承的转动频率变化来判断是否产生了重复切割。在开罐器刀片发生重复切割时及时停止刀片的转动,避免因重复切割所造成的问题。
附图说明
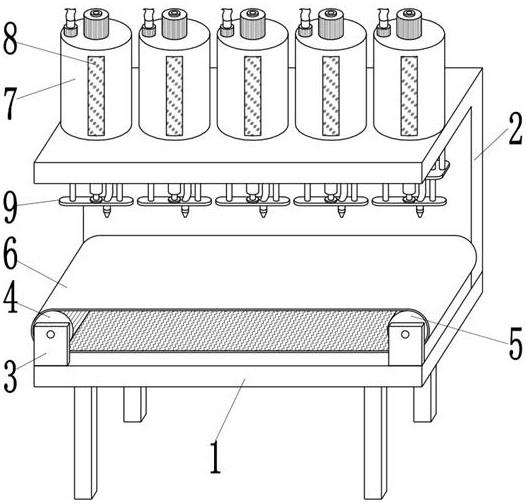
图1为本实用新型实施例的一种开罐器自动停止开罐的装置的整体结构示意图;
图2为本实用新型实施例的一种开罐器自动停止开罐的装置的控制模块的电路示意图;
图3为本实用新型实施例的一种开罐器自动停止开罐的装置的光电断路器及其外围电路示意图;
图4为本实用新型实施例的一种开罐器自动停止开罐的装置的轴承驱动模块的电路示意图;
图5为本实用新型实施例的一种开罐器自动停止开罐的装置的按键开关模块的电路示意图;
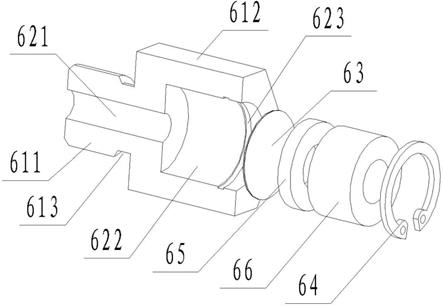
图6为本实用新型实施例的一种开罐器自动停止开罐的装置的产品结构图;
图7为本实用新型实施例的一种开罐器自动停止开罐的装置的产品结构爆炸图;
标号说明:
1、控制模块;2、光电断路器;3、光栅轮;4、供电模块;5、轴承驱动模块;6、轴承;7、驱动马达;8、驱动齿轮组件;9、按键开关模块;
c1、第一电容;c2、第二电容;
q1、第一三极管;q2、可控硅;q3、第二三极管;
r1、第一电阻;r2、第二电阻;r3、第三电阻;r4、第四电阻;r5、第五电阻;
s1、按键开关;
u1、主控芯片。
具体实施方式
为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
请参照图1至图7,一种开罐器自动停止开罐的装置,包括控制模块1、光电断路器2、光栅轮3、供电模块4、带有轴承6的轴承驱动模块5和开罐器刀片;
所述控制模块1分别与供电模块4、所述轴承驱动模块5和所述光电断路器2电连接;所述供电模块4同时与所述轴承驱动模块5和所述光电断路器2电连接,所述光栅轮3套接在所述轴承6上且所述光栅轮3的运动轨迹经过所述光电断路器2的光电检测区,所述轴承6与所述开罐器刀片固定连接;
所述轴承6带动所述光栅轮3转动,所述控制模块1用于测算开罐过程中所述轴承6的转动频率的变化。
从上述描述可知,本实用新型的有益效果在于:提供一种开罐器自动停止开罐的装置,控制模块1通过光电断路器2和光栅轮3的配合使用,测算在开罐器开罐过程中轴承6的转动频率变化来判断是否产生了重复切割。在开罐器刀片发生重复切割时及时停止刀片的转动,避免因重复切割所造成的问题。
进一步地,所述控制模块1包括主控芯片u1和第一电容c1;
所述第一电容c1的一端同时与所述主控芯片u1的供电电压输入引脚和所述供电模块4的供电端相连,且另一端与所述主控芯片u1的接地引脚相连。
从上述描述可知,上述为控制模块1上的主控芯片u1与其外围电路。第一电容c1起到滤波作用。
进一步地,还包括第一电阻r1、第二电阻r2和第二电容c2;
所述第一电阻r1的一端与所述主控芯片u1的第一串行输入输出口相连,且另一端与所述光电断路器2的发光二极管正极引脚相连,所述第二电容c2的一端同时与所述光电断路器2的光电三极管的集电极引脚、所述第二电阻r2的一端和所述主控芯片u1的第二串行输入输出口相连;
所述第二电阻r2的另一端与所述供电模块4的供电端相连,所述第二电容c2的另一端、所述光电断路器2的发光二极管负极引脚和光电三极管发射极引脚均接地。
从上述描述可知,上述为主控芯片u1和光电断路器2相连部分的电路。主控芯片u1通过第一串行输入输出口相连给光电断路器2上的发光二极管供电,使其发出光束,并通过第二串行输入输出口接收来自光电断路器2上光电三极管传来的电信号。该电信号的频率变化对应的是:光栅轮3随轴承6转动时一次次地反射来自光电断路器2的光束至光电三极管上而引起光电三极管输出的电信号发生的变化,即轴承6的转动频率变化。
进一步地,所述轴承6驱动模块5包括驱动马达7、驱动齿轮组件8、第一三极管q1、可控硅q2、第三电阻r3和第四电阻r4;
所述第三电阻r3的一端与所述主控芯片u1的第三串行输入输出口相连,且另一端与所述第一三极管q1的基极相连,所述第四电阻r4的一端与所述第一三极管q1的集电极相连,且另一端与所述可控硅q2的电源控制极相连,所述可控硅q2的正极与所述驱动马达7的负极相连,所述驱动马达7的正极与所述供电模块4的供电端相连;
所述第一三极管q1的发射极与所述可控硅q2的负极均接地,所述轴承6装配在所述驱动马达7上,所述驱动齿轮组件8的一端套接在所述轴承6上,且另一端与所述开罐器刀片固定连接,所述第一三极管q1和所述可控硅q2均为npn型。
从上述描述可知,当要控制轴承驱动开罐器刀片转动时,主控芯片u1通过第三串行输入输出口输出高电平,使得第一三极管q1导通和可控硅q2先后导通。供电模块4的供电端输出值驱动马达7上,使得驱动马达7驱动轴承6转动,进而开罐器刀片也开始转动。
进一步地,还包括按键开关模块9,所述按键开关模块9包括按键开关s1、第二三极管q3、第四电阻r4和第五电阻r5,所述驱动马达7的正极与所述供电模块4的供电端相连替换为:
所述按键开关s1的一端与所述供电模块4的供电端相连,且另一端与同时与所述驱动马达7的正极和所述第四电阻r4的一端相连;所述第四电阻r4的另一端与所述第五电阻r5的一端相连,所述第五电阻r5的另一端与所述第二三极管q3的基极相连,所述第二三极管q3的集电极与所述主控芯片u1的第四串行输入输出口相连;
第二三极管q3的发射极接地,所述第二三极管q3为npn型。
从上述描述可知,在驱动马达7与供电模块4之间还加入了按键开关模块9。主控芯片u1第四串行输入输出口与第二三极管q3的集电极相连。只有当按键开关s1被按下时,供电模块4的供电端输出才能输出值驱动马达7上;第二三极管q3才会导通;主控芯片u1才能收到来自按键开关模块9的电信号,从而控制驱动马达7工作。
以下实施例所述的一种开罐器自动停止开罐的方法或装置适用于采用侧切的方式进行开罐的开罐器,且可对不同种罐头进行可自动停止的侧切开罐动作。
请参照图1,本实用新型的实施例一为:
一种开罐器自动停止开罐的装置,如图1所示,包括控制模块1、光电断路器2、光栅轮3、供电模块4、带有轴承6的轴承驱动模块5和开罐器刀片。其中,控制模块1分别与供电模块4、轴承驱动模块5和光电断路器2电连接;供电模块4同时与轴承驱动模块5和光电断路器2电连接,光栅轮3套接在轴承6上且光栅轮3的运动轨迹经过光电断路器2的光电检测区,轴承6与开罐器刀片固定连接;
轴承6带动光栅轮3转动,所述控制模块1用于测算开罐过程中所述轴承6的转动频率的变化。
在本实施例中,光栅轮3随着轴承6的转动而转动的过程中,光栅轮3每次完成一周的转动,便会反射一次来自光电断路器2的光束,使得光电断路器2受到的光照强度随着光栅轮3的转动发生变化,进而光电断路器2输出代表相应变化的电信号。控制模块1通过该电信号便可以得到轴承6转动的频率值及其变化。
应当知晓的是,本实施例和以下实施例主要在于获取到轴承6的转动数据,至于对运动数据进行处理以得到判定开罐器刀片是否重复切割的方法,通过现有的计算方法即可实现,在本实施例和以下实施例不进行赘述。
请参照图2至图7,本实用新型的实施例二为:
一种开罐器自动停止开罐的装置,在上述实施例一的基础上,如图4控制模块1包括主控芯片u1和第一电容c1。其中,第一电容c1的一端同时与主控芯片u1的供电电压输入引脚和供电模块4的供电端相连,且另一端与主控芯片u1的接地引脚相连。
如图3与4所示,还包括第一电阻r1、第二电阻r2和第二电容c2。其中,第一电阻r1的一端与主控芯片u1的第一串行输入输出口相连,且另一端与光电断路器2的发光二极管正极引脚相连,第二电容c2的一端同时与光电断路器2的光电三极管的集电极引脚、第二电阻r2的一端和主控芯片u1的第二串行输入输出口相连;
第二电阻r2的另一端与供电模块4的供电端相连,第二电容c2的另一端、光电断路器2的发光二极管负极引脚和光电三极管发射极引脚均接地。
从上述描述可知,上述为主控芯片u1和光电断路器2相连部分的电路。主控芯片u1通过第一串行输入输出口相连给光电断路器2上的发光二极管供电,使其发出光束,并通过第二串行输入输出口接收来自光电断路器2上光电三极管传来的电信号。该电信号的频率变化对应的是:光栅轮3随轴承6转动时一次次地反射来自光电断路器2的光束至光电三极管上而引起光电三极管输出的电信号发生的变化,即轴承6的转动频率变化。
如图3与图5所示,轴承6驱动模块5包括驱动马达7、驱动齿轮组件8、第一三极管q1、可控硅q2、第三电阻r3和第四电阻r4。其中,第三电阻r3的一端与主控芯片u1的第三串行输入输出口相连,且另一端与第一三极管q1的基极相连,第四电阻r4的一端与第一三极管q1的集电极相连,且另一端与可控硅q2的基极相连,可控硅q2的集电极与驱动马达7的负极相连,驱动马达7的正极与供电模块4的供电端相连;
第一三极管q1的发射极与二三极管的发射极均接地,轴承6装配在驱动马达7上,驱动齿轮组件8的一端套接在轴承6上,且另一端与开罐器刀片固定连接,第一三极管q1为npn型。
如图3、图5与图6所示,还包括按键开关模块9,按键开关模块9包括按键开关、第二三极管q3、第四电阻r4和第五电阻r5,驱动马达7的正极与供电模块4的供电端相连替换为:
按键开关s1的一端与供电模块4的供电端相连,且另一端与同时与驱动马达7的正极和第四电阻r4的一端相连;第四电阻r4的另一端与第五电阻r5的一端相连,第五电阻r5的另一端与第二三极管q3的基极相连,第二三极管q3的集电极与主控芯片u1的第四串行输入输出口相连;
第二三极管q3的发射极接地,第二三极管q3为npn型。
在本实施例中,上述为本实施例中开罐器装置的具体电路连接图。本实施例的一个具体应用过程如下:
如果使用者一直按住按键开关s1,则主控芯片u1的第四串行输入输出口会检测到一个方波信号(50~60hz),这时主控芯片u1的第一串行输入输出口输出高电平,启动光电断路器2。同时,主控芯片u1的第三串行输入输出口输出高电平,使得第一三极管q1和可控硅q2先后导通,驱动马达7启动。驱动马达7启动带动轴承6上的光栅轮3转动。在开罐器刀片开关过程中,主控芯片u1接收来自光电断路器2的频率信号。当测算到轴承6的频率变化符合产生重复切割的条件时,主控芯片u1停止驱动马达7,开罐器刀片也随之停止。
在本实施例中,供电模块4的设计采用低成本的rc降压方式配合稳压二极管供电。在其他等同实施例中,供电模块4的设计还可以采用带隔离或非隔离的开关电源方案以及dcdc降压或者ldo降压代替。
在本实施例中,主控芯片u1采用简易sop-8封装的8位的单片机。其他等他实施例中,主控芯片u1可以使用不同8位、16位或32位的单片机芯片和不同的封装方式来实现。
如图6与图7所示,图6与图7涉及本实用新型的一种具体的产品设计图,上述光栅轮3、驱动马达7等部件皆设置在其内部。
另在,在其他等他实施例中,轴承驱动模块5的可控硅q2同样可以用不同型号的可控硅q2或设置继电器来替代,同样能达到控制驱动马达7工作或停止的效果。
综上所述,本实用新型公开了提供一种开罐器自动停止开罐的装置,控制模块通过光电断路器和光栅轮的配合使用,测算在开罐器开罐过程中轴承的转动频率变化来判断是否产生了重复切割。在开罐器刀片发生重复切割时及时停止刀片的转动,避免因重复切割所造成的问题。
以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。