本实用新型涉及包装设备技术领域,具体涉及一种新型压盖机构。
背景技术:
现有的罐子在进行包装时,常常是通过半自动的压盖机来实现。工人在使用压盖机时,控制传送带上的罐子的运行速度,使罐子与其上方的压盖头位置对应,然后压盖头把盖子压在罐子上实现压紧密封。盖子需要对齐罐口才能保证压合的效果,所以在盖子密封的时候,工人需要很小心地操作压盖机,工作效率低下,盖子压合的效果参差不齐。
中国专利公开号cn203624996u,公开日2014年6月4日,发明创造的名称为润滑油瓶专用手动压盖机,该申请案公开了一种润滑油瓶专用手动压盖机;其包括承托架、压盖平台、压盖机壳体、轧盖头、压盖手柄和传动装置;在承托架的上端设有压盖平台,在压盖平台的右部上端固定安装有压盖机壳体,压盖机壳体呈7字形,压盖机壳体的左部下端与压盖平台的左部上端之间有移动距离;在压盖机壳体的左部安装有能沿移动距离上下移动的轧盖头,轧盖头的外径大于润滑油瓶的瓶盖外径。该实用新型结构合理而紧凑,使用方便;瓶盖卡槽便于润滑油瓶在承托架上快速定位,使瓶嘴与轧盖头对中,操作方便,工作效率高;同时压盖平台可防止润滑油从瓶体内溢出喷溅至瓶身上,保持瓶身干净整洁,环保美观。该方案主要还是为了提高手动压盖的效率,装置的自动化程度低,包装效率不高。
技术实现要素:
本实用新型克服了现有技术中的缺点,提供了一种结构紧凑、占地面积小、自动化水平高、盖子和罐子压合准确度高的新型压盖机构。
为了解决上述技术问题,本实用新型是通过以下技术方案实现的:
一种新型压盖机构,包括罐子输送组件、盖子输送组件和压盖组件,所述罐子输送组件包括第一色标传感器、抱罐部件和用于驱动罐子原位旋转的罐子旋转部件,所述盖子输送组件包括传送带、第二色标传感器和水平方向上箍紧盖子的抱盖部件,所述压盖组件包括压盖气缸和吸盖头,吸盖头上端与压盖气缸连接,吸盖头的下端用于吸取盖子,抱罐部件处在抱盖部件的下方,压盖气缸的推杆向下运动到最低处时,盖子与抱罐部件中的罐体开口压合,压盖组件、抱盖部件和抱罐部件从上至下依次布置。
罐子和盖子采用直线式输送到工位,第二色标传感器对盖子的位置进行监测并记录偏移位置。第一色标传感器在罐子到达工位之后,根据第二色标传感器提供的信息,对罐子的偏移信息进行记录。罐子旋转部件根据第一色标传感器、第二色标传感器传递的信息驱动罐子旋转,使罐子旋转到能与盖子匹配的角度(罐子调节到匹配的角度可以让罐盖合体后变得更美观,使压盖成型后的所有产品外观保证统一。比如某些罐身正面带有图案,那么此时需要满足的匹配角度就是将罐身图案和盖子开口维持在同一个方向。)。压盖气缸驱动吸盖头吸取由抱盖部件预先箍紧的盖子,然后压盖气缸带着盖子移动到罐子的上方,压盖气缸的推杆向下降,降到最低处时,盖子被下压到罐子的罐口处且被压紧。
作为优选,所述抱罐部件包括两个左右对称布置的夹持机构,两个夹持机构之间形成容纳罐子的夹持工位。所述的夹持机构相当于两个对称布置的机械手从罐子的两侧靠拢罐子并夹住罐子。罐子由两个左右对称布置的夹持机构夹持,罐子的位置更容易控制,不容易脱落。当盖子被压紧到罐子罐口时,抱罐部件也需要夹紧罐子,防止滑出抱罐部件,采用两个左右对称布置的夹持机构,罐子两侧在水平方向上受到相等的力,罐子的位置更容易保持平衡,使罐口保持竖直朝上的状态。
作为优选,所述罐子旋转部件包括若干个竖直布置在夹持机构上邻近罐子一侧的辊柱和与第一色标传感器电连接的电机,电机驱动所述辊柱自转,辊柱自转时辊柱的侧壁与罐子的侧壁相贴。罐子被夹持机构夹持之后,还需要根据第一色标传感器和第二色标传感器传递的信息,对罐子进行旋转进行微调,通过辊柱可以实现罐子发生原位旋转,辊柱在绕着自身辊轴旋转的时候,辊柱的侧壁与罐子的侧壁是相贴的,辊柱自身旋转的同时,罐子也会发生旋转。
作为优选,所述抱盖部件包括两个左右对称的机械爪,两个机械爪之间设有位于机械爪下方的伸缩杆。伸缩杆可以调节两个机械爪之间的距离,预先伸缩杆收缩使两个机械爪夹紧盖子。然后盖子被吸盖头吸住之后,伸缩杆开始伸长,两个机械爪之间的距离变大,机械爪卸去了对盖子的夹紧力,气缸便能带动吸盖头和盖子一起自由移动到罐子上方,预备下一道工序。
作为优选,所述传送带布置在伸缩杆和机械爪之间,伸缩杆下方设有用于操控伸缩杆发生伸缩的铰链机构。铰链机构分别与伸缩杆前后两端进行铰接,铰链机构发生旋转时,就能控制伸缩杆的伸缩。由铰链机构来控制伸缩杆的伸缩,设计简洁,更加操作可行。
作为优选,所述铰链机构包括嵌设有铰轴的旋转件和与旋转件铰接的电动推杆,旋转件顶部的左右两端分别和所述伸缩杆的前后两端铰接。电动推杆可以推动旋转件做逆时针或顺时针的旋转,又因为伸缩杆的前后两端与旋转件铰接,所以电动推杆可以间接地控制伸缩杆的伸缩。
作为优选,所述辊柱表面设有若干防滑凸条。前面提到,辊柱自身发生旋转是为了罐子的旋转而设计,但辊柱旋转的时候可能会发生打滑,导致罐子不能被有效地进行自转微调,所以在辊柱表面增加若干防滑凸条,使罐子能够及时旋转到响应的角度。
与现有技术相比,本实用新型的有益效果是:气缸驱动吸盖头并通过吸盖头将盖子移动到罐子上方,然后进行压合,提高了自动化水平,降低人工成本;通过辊柱的自转使罐子也发生自转,罐子能够微调并及时地旋转到响应的角度;电动推杆推拉旋转件,可以调节与旋转件铰接的伸缩杆的伸缩,间接控制机械爪之间的距离,使机械爪更能精准地抓放盖子。
附图说明
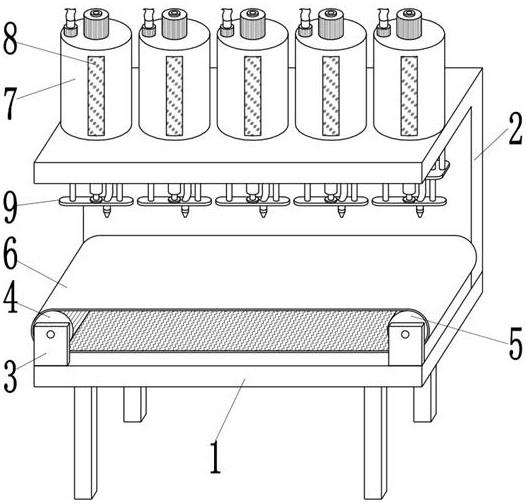
图1是本实用新型的结构示意图:
图2是本实用新型中抱罐部件的结构示意图;
图3是本实用新型中抱盖部件的结构示意图;
图4是本实用新型中压盖组件的结构示意图。
图中:罐子输送组件1、盖子输送组件2、压盖组件3、压盖气缸31、吸盖头32、抱罐部件4、罐子旋转部件5、抱盖部件6、夹持机构7、辊柱8、机械爪9、伸缩杆10、铰链机构11、旋转件111、电动推杆112、罐子12、盖子13。
具体实施方式
下面结合附图与具体实施方式对本实用新型作进一步详细描述:
如图1至图4所示,一种新型压盖机构,包括罐子输送组件1、盖子输送组件2和压盖组件3,所述罐子输送组件1包括第一色标传感器、抱罐部件4和用于驱动罐子12原位旋转的罐子旋转部件5,所述盖子输送组件2包括传送带、第二色标传感器和水平方向上箍紧盖子13的抱盖部件6,所述压盖组件3包括压盖气缸31和吸盖头32,吸盖头32上端与压盖气缸31连接,吸盖头32的下端用于吸取盖子13,抱罐部件4处在抱盖部件6的下方,压盖气缸31的推杆向下运动到最低处时,盖子13与抱罐部件4中的罐子12开口压合,压盖组件3、抱盖部件6和抱罐部件4从上至下依次布置。所述抱罐部件4包括两个左右对称布置的夹持机构7,这两个夹持机构7之间形成容纳罐子12的夹持工位。所述罐子旋转部件5包括若干个竖直布置在夹持机构上邻近罐子12一侧的辊柱8和与第一色标传感器电连接的电机(图中未示出),电机驱动所述辊柱8自转,辊柱8自转时辊柱8的侧壁与罐子12的侧壁相贴。所述抱盖部件6包括两个左右对称的机械爪9,两个机械爪9之间设有位于机械爪9下方的伸缩杆10。所述传送带布置在伸缩杆10和机械爪9之间,伸缩杆10下方设有用于操控伸缩杆10发生伸缩的铰链机构11。所述铰链机构11包括嵌设有铰轴的旋转件111和与旋转件111铰接的电动推杆112,旋转件111顶部的左右两端分别和所述伸缩杆10的前后两端铰接。
罐子12和盖子13采用直线式输送到工位,第二色标传感器对盖子13的位置进行监测并记录偏移位置。第一色标传感器在罐子12到达工位之后,根据第二色标传感器提供的信息,对罐子12的偏移信息进行记录。罐子旋转部件5的辊柱8根据第一色标传感器、第二色标传感器传递的信息驱动罐子12旋转,使罐子12旋转到能与盖子13进行匹配的角度,使罐身正面的图案和盖子开口保持一个方向。盖子13预先被机械爪9箍紧,压盖气缸31驱动吸盖头32吸取盖子13,然后电动推杆112控制旋转件111旋转,两个机械爪9之间距离增大,抱盖部件6释放对盖子13的压力。随后压盖气缸31通过吸盖头32可以把盖子13转移到罐子12的上方,压盖气缸31上的推杆向下降就是将盖子13压紧到罐子12上的过程。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。