本发明属于卷烟生产自动化智能化技术领域,尤其涉及一种基于移动视觉技术的烟梗智能上料系统。
背景技术:
目前在烟草制丝车间,烟梗的上料绝大部分均是通过人工操作完成:装有烟梗的烟梗包由运输车运送至指定区域无规则堆放,利用遥控器对挂钩(目前为三个钩)实现东西方向、上下方向移动。操作工利用遥控器将挂钩移至需开烟梗包处,人工手动将三个钩子分别勾上三袋烟梗包(南北方向的烟梗包需人工拉着钩子移至该处进行勾包)。勾包完成后,操作遥控器将烟梗包移动至与除尘罩等高位置时,操作人员一只手固定烟梗包,另一只手操作切割刀划开烟梗包底部后,附加人工抖动,使烟梗完全落入传送皮带(其他两个烟梗包为同样的操作,但中间有转动挂钩寻找未开烟梗包的过程)。开包完成后,将空烟梗包人工放至规定处。
为提升整体自动化程度并实现减员增效,在满足生产工艺要求的前提下,拟通过使用自动化设备、机器人来实现生产的自动化。
技术实现要素:
本发明目的在于提供一种基于移动视觉技术的烟梗智能上料系统,以解决烟梗包从运输卸包到空烟梗包回收的全流程自动化智能化的问题。
为实现上述目的,本发明采用如下技术方案:
基于移动视觉技术的烟梗智能上料系统技术方案主要由双轴桁架机器人系统、移动视觉系统、烟梗包卸车码垛机构、烟梗包破包卸料机构、烟梗包上料防尘机构、空烟梗包回收桶机构、改装葫芦吊等部分组成。本方案中双轴桁架机器人既可以完成从运输车抓包放在指定区域,也可以完成从指定区域抓包、开包到输送带上,可实现整体的自动化;原有的葫芦吊经改造后可以留以备用,防止设备出现故障,可以由人工继续操作,保证生产;由一套移动视觉系统完成了运输车上的烟梗包定位、摆放区域的烟梗包定位以及火星检测;轴2移动至漏斗上方才进行开包,保证烟梗不会洒落。
本发明的有益效果是:
本技术方案的智能系统完全替代了人工操作,实现了烟梗包从运输车至指定区域、从指定区域至烟梗输送机的移载以及烟梗包的破包卸料、空烟梗包的回收的所有流程,真正实现了烟梗上料的自动化智能化。
附图说明
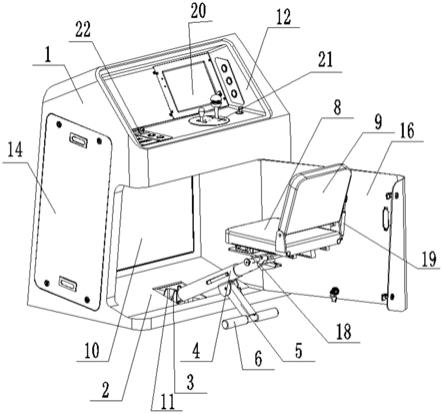
图1是本发明基于移动视觉技术的烟梗智能上料系统布局图;
图2是双轴桁架机器人示意图;
图3是烟梗包卸车码垛机构;
图4是十字万向机构;
图5是烟梗包破包卸料机构;
图6是烟梗包划开机构;
图7是吊钩旋转机构;
图8是视觉移动机构;
图9是空烟梗包回收桶机构;
图10是上料防尘机构;
图11是改造葫芦吊。
具体实施方式
以下通过实施例对本发明的技术方案进行详细的说明,以下的实施例仅是示例性的,仅能用来解释和说明本发明的技术方案,而不能解释为是对本发明技术方案的限制。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“内”、“外”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为是对本发明的限制,此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,也可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
通过下面具体的实施例并结合附图对本发明的技术方案进一步详细描述。
如图1至图11所示,一种基于移动视觉技术的烟梗智能上料系统,其特征在于:原固定式葫芦吊10改造为带滚动轮形式的,地面铺设移动轨道11,在烟梗包指定摆放区域架设双轴桁架机器人1,在双轴桁架机器人1的运动轴一2上安装烟梗包卸车码垛机构6,双轴桁架机器人1的运动轴二3上安装烟梗包破包卸料机构7;双轴桁架机器人1一端为悬臂梁结构,其下方用于停靠烟梗包运输车5;双轴桁架机器人1上方安装视觉移动机构4,在视觉移动机构4上安装两个视觉相机,一个在烟梗包运输车5及烟梗指定包摆放区范围移动,另一个在烟梗指定包摆放区及空烟梗包回收桶机构9范围内移动,实现双轴桁架机器人1的两个运动轴一2、轴二3的同步工作;在烟梗输送机13的入料口处架设烟梗包上料防尘机构8,实现防止烟梗包破包卸料机构7在破包卸料过程中的漏料及粉尘飞扬的功能;原排尘管道需要12进行改造,使得改造后的葫芦吊10有位置停放,保证基于移动视觉技术的烟梗智能上料系统正产生产。
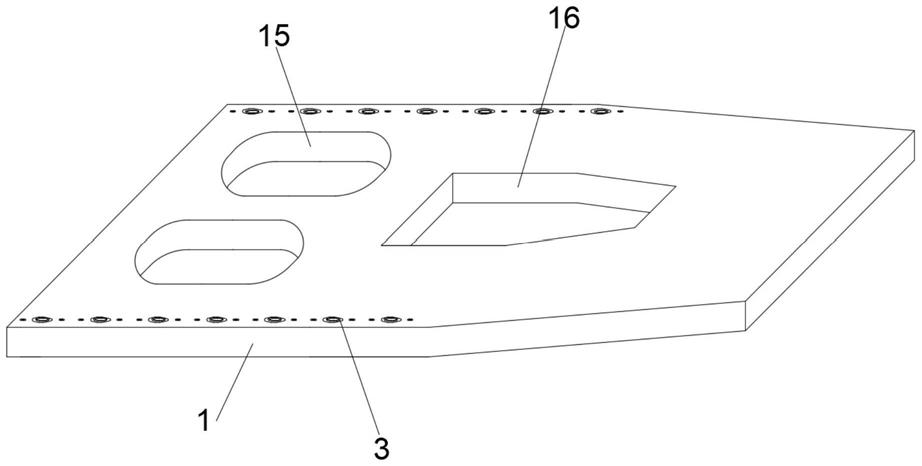
所述双轴桁架机器人1的结构为,由4根立柱14上面分别架设第一横梁19和第二横梁20,相互间用两个固定纵梁21、22固定连接,纵梁21为了避开运动轴一2的横向运动,固定连接位置约在立柱14的1/3处高度处,纵梁22固定连接位置约在立柱14的2/3处高度处;2立柱15支撑第一横梁19与地面,2立柱15相互间用短横梁16固定连接,两根立柱14与第二横梁20之间形成空挡,为改造葫芦吊10保留移动空间;第一横梁19与第二横梁20之间架设第一移动纵梁17和第二移动纵梁18,在第一移动纵梁17上架设运动轴一2,在第二纵梁18上架设运动轴二3,在运动轴一2端面安装烟梗包卸车码垛机构6,在运动轴二3端面安装烟梗包破包卸料机构7;在运动轴一2上安装拖链24,运动轴二3上安装拖链25,第一横梁19上安装拖链23,保证线缆的安全耐用性。
所述烟梗包卸车码垛机构6的结构为,第一电机26固定安装于十字万向机构28上端,并在十字万向机构28上安装第一称重传感器27,第一电机26穿过安装第一称重传感器27,十字万向机构28安装于烟梗包卸车码垛机构支架29上,在烟梗包卸车码垛机构支架29上固定安装位移传感器33,用于检测烟梗包卸车码垛机构与烟梗包的相对距离;在烟梗包卸车码垛机构支架29上同时固定安装第一气缸30,并与第一连杆机构31连接,第一连杆机构31与烟梗包卸车码垛机构两个夹爪32连接,通过第一气缸30的伸缩,带动第一连杆机构31运动实现烟梗包卸车码垛机构两个夹爪32抱夹的动作。
所述十字万向机构28的结构为,支撑件本体(加工型钢)34固定安装于烟梗包卸车码垛机构支架29上,第一连接件38焊接于支撑件本体34上,第一转向电机39安装于第一连接件38上,第一转向电机39安装联轴器41连接于第一转轴35,第一转轴35通过轴承安装于支撑件本34上;第二转轴36穿过第一转轴35固定连接,并通过轴承安装于支撑板37上,第二连接件40焊接于支撑板37上,第二转向电机安装于第二连接件40上,第二转向电机安装联轴器连接于第二转轴36。
所述烟梗包破包卸料机构7的结构为,第二气缸43固定安装于烟梗包破包卸料机构支架42上,并穿过第二称重传感器44,第二称重传感器44固定安装于烟梗包破包卸料机构支架42上,并与桁架机器人的运动轴二固定连接,第二气缸43与第二连杆机构45连接,第二气缸43带动第二连杆机构45实现烟梗包破包卸料机构夹爪46的抱夹;第一连接杆47一端固定安装于烟梗包破包卸料机构支架42上,另一端固定连接烟梗包划开机构48;第一固定板49固定安装在烟梗包破包卸料机构支架42上,在第一固定板49上安装第一导轨50,第一导轨50的第一滑块固定连接吊钩旋转机构51;第三气缸52固定安装在烟梗包破包卸料机构支架42上,第三气缸52活动端连接捶料杆53,用于烟梗包的捶料。
所述烟梗包划开机构48的结构为,第一连接板54与第一连接杆47固定连接,滑台气缸55固定安装在第一连接板54上,第一安装板56与滑台气缸55运动端固定连接,第四气缸57安装在第一安装板56上,刀片58同时与第一安装板56、第四气缸57活动连接,随着第四气缸57伸缩实现刀片的摆动。
所述吊钩旋转机构51的结构为,第二连接板59与第一导轨50的第一滑块固定连接,在第二连接板59上安装第二导轨60,第二导轨60的第二滑块与第二安装板61固定连接,在第二安装板61的底端安装连接件62,在连接件62上安装第二电机64,第二电机64轴通过联轴器63与转轴65连接,转轴两端安装轴承与第二安装板61连接,t型板66与转轴65固定连接;在t型板66上安装无杆气缸67、滚珠丝杠68,无杆气缸67、滚珠丝杠68通过第一连接块70连接,在滚珠丝杠68两端固定连接吊钩69,通过无杆气缸67的移动及滚珠丝杠68的传动使得吊钩69同时翻转或者复位。
所述视觉移动机构4的结构为,支撑梁(型钢)78架设在烟梗上料工位厂房上方,第三导轨72固定安装在支撑梁78上,齿条71固定安装在支撑梁78上,第二连接块74安装在第三导轨72的第三滑块上,电机安装板75固定安装于第二连接块74上,第三电机76安装在电机安装板75上,第三电机76轴安装齿轮73,齿轮73与齿条71配合,随着第三电机76的转动实现整体的移动;在第二连接块74上同时安装有视觉相机77。
所述空烟梗包回收桶机构9的结构为,底板79固定安装于地面,开口桶80焊接安装于底板79上,在开口桶80上焊接固定第三安装板81,第三安装板81上安装手指气缸82,手指气缸82上安装夹块83,用于夹住空烟梗包,起到卸包的作用;
所述上料防尘机构8的结构为,漏斗84固定安装在烟梗输送机上方,第五气缸86安装在漏斗侧方,密封翻板85与漏斗84通过铰链连接,第三连接块87固定安装在密封翻板85侧方,转轴88与第三连接块87连接,同时与第五气缸86活动轴连接,随着第五气缸的伸缩实现密封翻板85的翻转。
所述葫芦吊10的结构为,原葫芦吊89结构形式保持不变,在地脚加装滚动轮90,该轮由电驱动,在地面铺设的移动轨道11上移动。
本发明包括双轴桁架机器人系统1、移动视觉系统4、烟梗包卸车码垛机构6、烟梗包破包卸料机构7、烟梗包上料防尘机构8、空烟梗包回收桶机构9、改装葫芦吊10等部分组成。
方案整体动作流程:
运输车5停靠在固定位置,传感器检测到信号,传输给视觉系统。
视觉系统4移动至指定位置采集运输车烟梗种类编号信息及车上烟梗包信息,通过视觉算法确定取烟梗包顺序。
双轴桁架机器人1的运动轴一2根据给定顺序取烟梗包称重后摆放至指定区域。
双轴桁架机器人1的运动轴二3根据视觉系统4给定的烟梗包摆放区域信息移动至对应位置取烟梗包。
双轴桁架机器人1运动轴二3再移动至烟梗输送机13的上料防尘机构8上沿进行破包、抖动卸料。
双轴桁架机器人1的运动轴二3最后执行卸空烟梗包动作。
重复执行上述动作流程,进行生产。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的发明范围内。本发明要求保护范围由所附的权利要求书及等同物界定。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。