1.本实用新型涉及一种码垛装车技术领域,尤其涉及一种用于平板车自动检测装车的码垛机构。
背景技术:
2.随着市场竞争的日益加剧,成本和效率称为越来越称为主要考虑的问题,产品的种类多,尺寸、重量和信息采集都会产生很多制造和人工成本,现有技术中,采用人工对产品进行码垛装车,大大的降低了工作效率。
技术实现要素:
3.本实用新型解决的技术问题是提供一种全自动的用于平板车自动检测装车的码垛机构,解决了人工码垛装车效率低的问题。
4.本实用新型解决其技术问题所采用的技术方案是:一种用于平板车自动检测装车的码垛机构,包括机架、伸缩电缆和第四滑轨,所述伸缩电缆驱动机架在第四滑轨上滑动,所述机架上设置有第一导轨和与第一导轨垂直设置的第二导轨,还包括第一伺服电机、滚珠丝杠、机械手、第二伺服电机和第三伺服电机,所述滚珠丝杠一端与第一伺服电机连接,所述滚珠丝杠另一端与机械手连接,所述第二伺服电机用于带动机械手在第一导轨内前后运动,所述第三伺服电机用于带动机械手在第二导轨内左右运动,所述第一伺服电机通过驱动滚珠丝杠带动机械手做上下运动。
5.进一步的是:所述机械手包括安装板、第一夹手和第二夹手,还包括双向丝杆和驱动双向丝杆转动的第四电机,所述第一夹手和第二夹手设置在双向丝杆上,所述双向丝杆两端转动连接在安装板上,且一端与第四电机连接。
6.进一步的是:所述机架底部设置有滑轮,伸缩电缆驱动机架通过滑轮在第四滑轨上滑动。
7.本实用新型的有益效果是:通过伸缩电缆驱动机架电缆在第四滑轨上滑动以及机械手通过伺服电机的驱动实现xyz三轴的运动,实现了对平板车自动检测装车的全自动码垛和装车,提高了工作效率,解决了人工操作效率低的问题。
附图说明
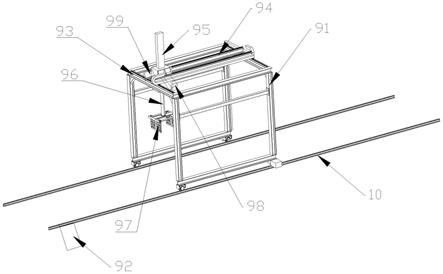
8.图1为码垛机构整体示意图。
9.图2为机械手结构示意图。
10.图中标记为:机架91、伸缩电缆92、第一导轨93、第二导轨94、第一伺服电机95、滚珠丝杠96、机械手97、第一夹手971、第二夹手972、安装板973、第四电机974、双向丝杆975、第二伺服电机98、第三伺服电机99、第四滑轨10。
具体实施方式
11.下面结合附图和具体实施方式对本实用新型进一步说明。
12.如图1和2所示,一种用于平板车自动检测装车的码垛机构,包括机架91、伸缩电缆92和第四滑轨10,所述伸缩电缆92驱动机架91在第四滑轨10上滑动,所述机架91上设置有第一导轨93和与第一导轨93垂直设置的第二导轨94,还包括第一伺服电机95、滚珠丝杠96、机械手97、第二伺服电机98和第三伺服电机99,所述滚珠丝杠96一端与第一伺服电机95连接,所述滚珠丝杠96另一端与机械手97连接,所述第二伺服电机98用于带动机械手97在第一导轨93内前后运动,所述第三伺服电机99用于带动机械手97在第二导轨94内左右运动,所述第一伺服电机95通过驱动滚珠丝杠96带动机械手97做上下运动;所述伸缩电缆对码垛机构9进行供电使其根据码垛要求在第四滑轨10上滑动,所述机械手97在第一伺服电机95(或直线电机)、滚珠丝杠96、第二伺服电机98和第三伺服电机99的作用下,实现对产品的码垛,解决了人工码垛效率低和存在安全隐患的问题,提高了工作速率和安全指数。
13.在此基础上,如图2所示,所述机械手97包括安装板973、第一夹手971和第二夹手972,还包括双向丝杆975和驱动双向丝杆975转动的第四电机,所述第一夹手971和第二夹手972设置在双向丝杆975上,所述双向丝杆975两端转动连接在安装板973上,且一端与第四电机974连接;所述第四电机974驱动双向丝杆975转动,双向丝杆975的转动带动设置在双向丝杆975上第一夹手971和第二夹手972相对运动来对货物的夹持以实现码垛工作,达到了提高工作效率的效果。
14.在此基础上,如图1所示,所述机架91底部设置有滑轮,伸缩电缆92驱动机架91通过滑轮在第四滑轨10上滑动;设置的滚轮方便维修,提高工作速率。
15.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种用于平板车自动检测装车的码垛机构,其特征在于:包括机架(91)、伸缩电缆(92)和第四滑轨(10),所述伸缩电缆(92)驱动机架(91)在第四滑轨(10)上滑动,所述机架(91)上设置有第一导轨(93)和与第一导轨(93)垂直设置的第二导轨(94),还包括第一伺服电机(95)、滚珠丝杠(96)、机械手(97)、第二伺服电机(98)和第三伺服电机(99),所述滚珠丝杠(96)一端与第一伺服电机(95)连接,所述滚珠丝杠(96)另一端与机械手(97)连接,所述第二伺服电机(98)用于带动机械手(97)在第一导轨(93)内前后运动,所述第三伺服电机(99)用于带动机械手(97)在第二导轨(94)内左右运动,所述第一伺服电机(95)通过驱动滚珠丝杠(96)带动机械手(97)做上下运动。2.如权利要求1所述的一种用于平板车自动检测装车的码垛机构,其特征在于:所述机械手(97)包括安装板(973)、第一夹手(971)和第二夹手(972),还包括双向丝杆(975)和驱动双向丝杆(975)转动的第四电机,所述第一夹手(971)和第二夹手(972)设置在双向丝杆(975)上,所述双向丝杆(975)两端转动连接在安装板(973)上,且一端与第四电机(974)连接。3.如权利要求1所述的一种用于平板车自动检测装车的码垛机构,其特征在于:所述机架(91)底部设置有滑轮,伸缩电缆(92)驱动机架(91)通过滑轮在第四滑轨(10)上滑动。
技术总结
本实用新型公开了一种用于平板车自动检测装车的码垛机构,包括机架、伸缩电缆和第四滑轨,伸缩电缆驱动机架在第四滑轨上滑动,机架上设置有第一导轨和与第一导轨垂直设置的第二导轨,还包括第一伺服电机、滚珠丝杠、机械手、第二伺服电机和第三伺服电机,滚珠丝杠一端与第一伺服电机连接,滚珠丝杠另一端与机械手连接,第二伺服电机用于带动机械手在第一导轨内前后运动,第三伺服电机用于带动机械手在第二导轨内左右运动,第一伺服电机通过驱动滚珠丝杠带动机械手做上下运动,伸缩电缆驱动机架电缆在第四滑轨上滑动以及机械手通过伺服电机的驱动实现XYZ三轴的运动,实现了对平板车自动检测装车的全自动码垛和装车,解决了人工操作效率低的问题。工操作效率低的问题。工操作效率低的问题。
技术研发人员:管高峰 潘浩
受保护的技术使用者:江苏格莱富智能装备有限公司
技术研发日:2020.12.02
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

