一种用于机器人无障碍进出电梯的装置
【技术领域】
1.本实用新型涉及机器人技术领域,特别涉及一种用于机器人无障碍进出电梯的装置。
背景技术:
2.机器人作为自动控制领域的高新技术产品,能自动执行任务并协助人类工作,在使用的过程中,机器人往往需要自由进出电梯,由于电梯机械结构的限制,电梯的轿厢和楼层相接的地方会存在一个数厘米的间隔,机器人需要跨过这个间隔才能进出电梯,为了便于机器人进出电梯,通常采用增大机器人轮径或增大机器人驱动力的方法,这就导致了小轮径的机器人或驱动力较小的机器人无法自由进出电梯。
技术实现要素:
3.为解决小轮径的机器人或驱动力较小的机器人自由进出电梯的问题,本实用新型提供了一种用于机器人无障碍进出电梯的装置。
4.为了解决上述技术问题,本实用新型提供一种用于机器人无障碍进出电梯的装置,包括支架、踏板及弹性部件,所述支架可拆卸安装在电梯厢体的底板和/或楼层的底板上,所述踏板与所述支架转动连接;当所述机器人从所述踏板经过时,所述踏板从初始状态沿所述支架转动并置于所述电梯厢体的底板与所述楼层的底板之间的间隙上,所述机器人通过所述踏板后,所述踏板受所述弹性部件的恢复力作用恢复到初始状态。
5.优选地,所述支架进一步包括转轴和安装架,所述踏板进一步包括与转轴相配合的安装孔,所述转轴穿过所述安装孔将所述踏板与所述安装架套设在一起。
6.优选地,所述弹性部件为扭簧。
7.优选地,所述踏板开设有至少一个开口,所述开口中设置两个所述扭簧,两个所述扭簧的自由端分别设置在所述踏板的相对面上。
8.优选地,所述踏板开设有两个开口,两个所述开口以所述踏板的中轴线对称设置,每个所述开口中设置两个所述扭簧。
9.优选地,所述安装架进一步设有通孔,所述电梯厢体的底板和/或所述楼层的底板与所述安装架通过带有螺纹的紧固件可拆卸连接。
10.优选地,所述踏板在初始状态下与所述电梯厢体的底板和/或所述楼层的底板相垂直。
11.优选地,所述转轴进一步包括限位装置,所述限位装置可拆卸安装在所述转轴上,所述限位装置与所述安装架配合使用以防止所述转轴滑出所述安装架。
12.优选地,所述踏板两面均设有防滑花纹。
13.优选地,所述踏板为矩形踏板或凹形踏板。
14.与现有技术相比,本实用新型提供的一种用于机器人无障碍进出电梯的装置具有以下优点:
15.1、包括支架、踏板及弹性部件,支架可拆卸安装在电梯厢体的底板和/或楼层的底板上,踏板与支架转动连接,当机器人从踏板经过时,踏板从初始状态沿支架转动并置于电梯厢体的底板与楼层的底板之间的间隙上,机器人通过踏板后,踏板受弹性部件的恢复力作用恢复到初始状态,此设计通过踏板转动后在电梯厢体与楼层之间形成桥梁置于电梯厢体与楼层之间的间隙上,使得轮径较小或驱动能力较弱的机器人能简单便捷地进入电梯,同时弹性部件能让踏板恢复到初始状态,避免转动后的踏板影响电梯的正常运行。
16.2、支架进一步包括转轴和安装架,踏板进一步包括与转轴相配合的安装孔,转轴穿过安装孔将踏板与安装架套设在一起,此设计通过转轴实现踏板与安装架的转动连接,减小了踏板在转动时的机械阻力,降低了转轴与踏板之间的磨损量,同时转轴结构简单,便于踏板与支架之间的安装拆卸。
17.3、弹性部件为扭簧,扭簧结构简单可靠,便于加工制造,且具有较高的互换性。
18.4、踏板进一步设有开口,开口中设置两个扭簧,两个扭簧的自由端分别设置在踏板的相对面上,通过在踏板上设置开口进一步对扭簧进行限位,避免扭簧在转轴上发生左右窜动的现象,同时设置在踏板相对面上的自由端能够保证踏板无论往哪面旋转均可通过自由端的恢复力恢复到初始状态;踏板上可以设有一处开口或设有两处开口,踏板上设有一处开口的结构比较简单,便于组装,踏板上设有两个开口的结构更加可靠,保证踏板完成翻转后能快速恢复到自由状态。
19.5、安装架进一步设有通孔,电梯厢体的底板和/或楼层的底板与安装架通过带有螺纹的紧固件可拆卸连接,带有螺纹的紧固件结构简单可靠,便于安装拆卸,且具有较高的互换性。
20.6、踏板在初始状态下与电梯厢体的底板和/或楼层的底板相垂直,此设计通过对踏板的初始状态进行限定,进一步提高了机器人无障碍进出电梯的装置的一致性,同时机器人通过踏板后,踏板恢复到与电梯厢体的底板和/或楼层的底板相垂直的状态,避免了电梯门在开启或闭合的过程中电梯门与踏板之间发生干涉的现象,进一步提高了机器人无障碍进出电梯的装置的实用性。
21.7、转轴进一步包括限位装置,限位装置可拆卸安装在转轴上,限位装置与安装架配合使用以防止转轴滑出安装架,可拆卸的限位装置便于后期使用过程中的更换,同时通过可拆卸的限位装置对转轴进一步进行限位,提高了机器人无障碍进出电梯的装置的可靠性。
22.8、踏板两面均设有防滑花纹,此设计通过防滑花纹增大了机器人通过踏板时与踏板之间的摩擦力,避免机器人通过踏板时发生打滑的现象,进一步提高了机器人通过踏板时的顺畅性。
23.9、踏板为矩形踏板或凹形踏板,矩形踏板具有较高的结构强度,能保证踏板在长期翻转的状况下不发生形变,且矩形踏板结构简单便于加工制作;凹形踏板减少了踏板的用料,降低了踏板的制造成本,同时踏板重量减轻,减小了踏板在转动时的机械阻力,更易于踏板的翻转。
【附图说明】
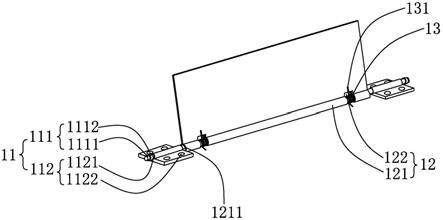
24.图1是本实用新型第一实施例提供的用于机器人无障碍进出电梯的装置的立体结
构示意图一。
25.图2是本实用新型第一实施例提供的用于机器人无障碍进出电梯的装置的立体结构示意图二。
26.图3是本实用新型第一实施例提供的用于机器人无障碍进出电梯的装置的立体结构示意图三。
27.图4是本实用新型第一实施例提供的用于机器人无障碍进出电梯的装置的立体结构示意图四。
28.图5是本实用新型第一实施例提供的用于机器人无障碍进出电梯的装置的安装示例图。
29.图6是本实用新型第一实施例提供的用于机器人无障碍进出电梯的装置的使用状态示例图。
30.附图标识说明:
31.1、用于机器人无障碍进出电梯的装置;2、电梯厢体的底板;3、楼层的底板;4、间隙;
32.11、支架;12、踏板;13、弹性部件;
33.111、转轴;112、安装架;121、连接端;122、开口;131、自由端;
34.1111、螺柱;1112、螺母;1121、第二安装孔;1122、安装孔;1211、第一安装孔。
【具体实施方式】
35.为了使本实用新型的目的,技术方案及优点更加清楚明白,以下结合附图及实施实例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
36.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
37.请参阅图1,本实用新型第一实施例提供一种用于机器人无障碍进出电梯的装置1,包括支架11及踏板12,踏板12与支架11转动连接。
38.具体的,支架11进一步设有转轴111和安装架112,踏板12进一步设有连接端121,连接端121进一步设有与转轴111间隙配合的第一安装孔1211,安装架112进一步设有与转轴111过渡配合的第二安装孔1121,转轴111穿过第一安装孔1211及第二安装孔1121将踏板12与安装架112套设在一起,安装完成后的踏板12可沿着转轴111的中轴线转动,踏板12转动时,转轴111减小了踏板12的机械阻力,降低了转轴111与踏板12之间的磨损量。
39.本实用新型对安装架112的数量不做具体限定,只要满足能支撑踏板12转动即可,具体的,本实用新型第一实施例安装架112数量为二,两处安装架112分别设置在踏板12两端,转轴111依次穿过第一处安装架112、踏板12及第二处安装架112将踏板12与支架11套设在一起。
40.本实用新型对踏板12的材料不做具体限定,可选的材料包括但不限于塑料、不锈钢、铝合金等,具体的,本实用新型第一实施例踏板12材料为不锈钢,不锈钢具有优异的耐
蚀性,能够避免踏板因长期未使用而发生锈蚀的现象,进一步延长了踏板12的使用寿命,同时不锈钢具有一定的强度,能保证踏板12在长期翻转的状况下不发生形变。
41.本实用新型对第一安装孔1211设置在踏板12上的方式不做具体限定,只要满足第一安装孔1211与踏板12连接可靠即可,可选的,第一安装孔1211可以通过焊接的方式固设在踏板12上,第一安装孔1211也可以为踏板12折弯后形成的圆形通孔,具体的,本实用新型第一实施例第一安装孔1211为踏板12折弯后形成的圆形通孔。
42.进一步的,为了避免机器人在踏板12上行驶时发生打滑的现象,踏板12进一步设有防滑花纹(图中未明示),防滑花纹设置在踏板12两面并与踏板12一体成型制作。本实用新型通过防滑花纹增大了机器人在踏板12上行驶时的摩擦力,进一步提高了机器人通过踏板12时的顺畅性。
43.本实用新型对踏板12上防滑花纹的形状不做具体限定,只要满足具有防滑功能即可,可选的防护花纹有扁豆形、菱形、圆豆形、扁圆混合形状等。
44.本实用新型对踏板12的形状不做具体限定,只要满足机器人能顺利通过踏板12即可,可选的,踏板12为矩形踏板或凹形踏板。
45.请继续参阅图1,作为一种实施方式,踏板12为矩形踏板,矩形的踏板12具有较高的结构强度,能保证踏板12在长期翻转的状况下不发生形变,且矩形的踏板12结构简单便于加工制作。
46.请参阅图2,作为另一种实施方式,踏板12为凹形踏板,凹形的踏板12减少了踏板12的用料,降低了踏板12的制造成本,同时踏板12重量减轻,减小了踏板12在转动时的机械阻力,更易于踏板12的翻转。
47.请继续参阅图2,进一步的,为了避免装置1在使用的过程中转轴111滑出安装架112,转轴111进一步设有限位装置,限位装置可拆卸安装在转轴111上并与安装架112配合使用,进一步对转轴111进行限位。
48.具体的,转轴111两端进一步设有螺柱1111,两端螺柱1111进一步设有与其相配合的螺母1112,螺母1112的外轮廓大于第一安装孔1211的外轮廓,安装架112与踏板12通过转轴111套设在一起后,分别在转轴111两端的螺柱1111上拧入螺母1112,两端的螺母1112与安装架112相配合进一步对转轴111进行限位以避免转轴111在使用的过程中滑出安装架112,同时转轴111两端的螺母1112拆卸方便且具有较高的互换性,便于后期对螺母1112进行维护更换。
49.进一步的,为了避免完成翻转后的踏板12影响电梯门的开启或闭合,装置1进一步设有弹性部件13,弹性部件13设置在支架11上并与踏板12相配合,当踏板12完成翻转后踏板12受弹性部件13的恢复力作用恢复到初始状态,避免了电梯门在开启或闭合的过程中电梯门与踏板12之间发生干涉的现象,进一步提高了装置1的实用性。
50.本实用新型对踏板12的初始状态不做具体限定,只要满足在初始状态下不影响电梯门的开启或闭合即可。
51.本实用新型对弹性部件13的结构不做具体限定,只要满足能够将翻转完成后的踏板12恢复到初始状态即可,具体的本实用新型第一实施例弹性部件13为扭簧。
52.请继续参阅图2,踏板12进一步设有开口122,开口122设置在踏板12的第一安装孔1211处,弹性部件13套设在转轴111上并置于开口122内,弹性部件13进一步设有自由端
131,本实用新型对踏板12上开口122的数量不做具体限定,可选的,踏板12上可以只设有一处开口122或踏板12上设有两处开口122。
53.请参阅图3,作为一种实施方式,踏板12开设有一个开口122,开口122设置在踏板12的中轴线a处,开口122中设有两个弹性部件13,两个弹性部件13的自由端131分别设置在踏板12的相对面上,踏板12在翻转时会挤压弹性部件13的自由端131,完成翻转后踏板12受自由端131的恢复力作用恢复到初始状态,本实施例通过在踏板12上设置开口122进一步对弹性部件13进行限位,避免弹性部件13在转轴111上发生左右窜动的现象,同时踏板12上设置一处开口122,结构简单,便于装置1的组装。
54.请参阅图4,作为另一种实施方式,踏板12开设有两个开口122,两个开口122以踏板12的中轴线b对称设置,每个开口122中均设有两个弹性部件13,两个弹性部件13的自由端131分别设置在踏板12的相对面上,踏板12在翻转时会挤压弹性部件13的自由端131,完成翻转后踏板12受自由端131的恢复力作用恢复到初始状态,本实施例通过两处开口122上的弹性部件13同时作用于踏板12,进一步增强了踏板12翻转后的恢复力,保证完成翻转后的踏板12能快速恢复到自由状态,并进一步提高了装置1的可靠性。
55.请参阅图5,为了便于装置1的安装拆卸,安装架112进一步设有通孔1122及带螺纹的紧固件(图中未明示),装置1通过带螺纹的紧固件可拆卸安装在电梯厢体的底板2和/或楼层的底板3上。
56.本实用新型对带螺纹的紧固件不做具体限定,只要满足装置1安装牢固可靠即可,可选的带螺纹的紧固件有螺栓组件、螺钉组件、地脚螺栓等。
57.本实用新型对通孔1122的数量不做具体限定,只要满足装置1安装牢固可靠即可,具体的,本实用新型第一实施例中通孔1122的数量为四。
58.具体的,本实用新型第一实施例电梯厢体的底板2和楼层的底板3均安装有装置1,电梯厢体的底板2和楼层的底板3进一步设有与通孔相对应的螺纹孔(图中未明示),两处装置1分别通过带螺纹的紧固件安装在电梯厢体的底板2和楼层的底板3上,装置1安装完成后踏板12的转动方向与机器人的行驶方向一致。
59.请参阅图4及图5,具体的,本实用新型第一实施例踏板12在初始状态下与电梯厢体的底板2和/或楼层的底板3相垂直,当机器人从踏板12上经过时,踏板12在初始状态下沿机器人行驶方向转动,直到踏板12与电梯厢体的底板2相接触或踏板12与楼层的底板3相接触,电梯厢体的底板2与楼层的底板3之间存在一定的间隙4,完成转动后的踏板12在间隙4上形成一桥梁,这样轮径较小或驱动能力较弱的机器人能简单便捷地进入电梯,机器人通过踏板12后,踏板12受弹性部件13的恢复力作用恢复到初始状态,避免转动后的踏板12影响电梯的正常运行。
60.与现有技术相比,本实用新型提供的一种用于机器人无障碍进出电梯的装置具有以下优点:
61.1、包括支架、踏板及弹性部件,支架可拆卸安装在电梯厢体的底板和/或楼层的底板上,踏板与支架转动连接,当机器人从踏板经过时,踏板从初始状态沿支架转动并置于电梯厢体的底板与楼层的底板之间的间隙上,机器人通过踏板后,踏板受弹性部件的恢复力作用恢复到初始状态,此设计通过踏板转动后在电梯厢体与楼层之间形成桥梁置于电梯厢体与楼层之间的间隙上,使得轮径较小或驱动能力较弱的机器人能简单便捷地进入电梯,
同时弹性部件能让踏板恢复到初始状态,避免转动后的踏板影响电梯的正常运行。
62.2、支架进一步包括转轴和安装架,踏板进一步包括与转轴相配合的安装孔,转轴穿过安装孔将踏板与安装架套设在一起,此设计通过转轴实现踏板与安装架的转动连接,减小了踏板在转动时的机械阻力,降低了转轴与踏板之间的磨损量,同时转轴结构简单,便于踏板与支架之间的安装拆卸。
63.3、弹性部件为扭簧,扭簧结构简单可靠,便于加工制造,且具有较高的互换性。
64.4、踏板进一步设有开口,开口中设置两个扭簧,两个扭簧的自由端分别设置在踏板的相对面上,通过在踏板上设置开口进一步对扭簧进行限位,避免扭簧在转轴上发生左右窜动的现象,同时设置在踏板相对面上的自由端能够保证踏板无论往哪面旋转均可通过自由端的恢复力恢复到初始状态,进一步的踏板上可以设有一处开口或设有两处开口,踏板上设有一处开口的结构比较简单,便于组装;踏板上设有两个开口的结构更加可靠,保证踏板完成翻转后能快速恢复到自由状态。
65.5、安装架进一步设有通孔,电梯厢体的底板和/或楼层的底板与安装架通过带有螺纹的紧固件可拆卸连接,带有螺纹的紧固件结构简单可靠,便于安装拆卸,且具有较高的互换性。
66.6、踏板在初始状态下与电梯厢体的底板和/或楼层的底板相垂直,此设计通过对踏板的初始状态进行限定,进一步提高了机器人无障碍进出电梯的装置的一致性,同时机器人通过踏板后,踏板恢复到与电梯厢体的底板和/或楼层的底板相垂直的状态,避免了电梯门在开启或闭合的过程中电梯门与踏板之间发生干涉的现象,进一步提高了机器人无障碍进出电梯的装置的实用性。
67.7、转轴进一步包括限位装置,限位装置可拆卸安装在转轴上,限位装置与安装架配合使用以防止转轴滑出安装架,可拆卸的限位装置便于后期使用过程中的更换,同时通过可拆卸的限位装置对转轴进一步进行限位,提高了机器人无障碍进出电梯的装置的可靠性。
68.8、踏板两面均设有防滑花纹,此设计通过防滑花纹增大了机器人通过踏板时与踏板之间的摩擦力,避免机器人通过踏板时发生打滑的现象,进一步提高了机器人通过踏板时的顺畅性。
69.9、踏板为矩形踏板或凹形踏板,矩形踏板具有较高的结构强度,能保证踏板在长期翻转的状况下不发生形变,且矩形踏板结构简单便于加工制作;凹形踏板减少了踏板的用料,降低了踏板的制造成本,同时踏板重量减轻,减小了踏板在转动时的机械阻力,更易于踏板的翻转。
70.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的原则之内所作的任何修改,等同替换和改进等均应包含本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

