1.本发明涉及起重机械安全监测技术领域,尤其是涉及一种起升高度监测系统及方法。
背景技术:
2.履带起重机等臂架类起重机械吊具高度随着臂架组合、臂架长度和角度、起升钢丝绳收放而变化。现有技术多采用角度传感器测量起升卷筒和臂架角度,间接计算吊具高度。实际中,由于臂架变形等因素,导致上述方法计算的吊具高度和实际高度误差较大,影响设备安全使用。
技术实现要素:
3.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种起升高度监测系统及方法。
4.本发明的目的可以通过以下技术方案来实现:
5.一种起升高度监测系统,该系统包括声波发射器、第一声波接收器和第二声波接收器,所述的声波发射器设置在起重机械的吊具顶部,所述的第一声波接收器和第二声波接收器设置在起重机械回转平台表面,第一声波接收器和第二声波接收器间隔一定距离且两者连线与起重机械回转中心轴线垂直相交,该系统还包括用于存储第一声波接收器和第二声波接收器间距、回转平台表面与地面距离以及吊具顶部与挂钩末端距离的存储器,该系统还包括用于控制声波发射器、第一声波接收器和第二声波接收器、获取两个声波接收器与声波发射器之间距离、获取存储器中距离信息并计算得到起升高度的控制器,所述的控制器分别连接声波发射器、第一声波接收器、第二声波接收器和存储器。
6.优选地,该系统还包括用于起升高度超限报警的报警器,所述的报警器连接所述的控制器。
7.优选地,所述的报警器包括本地报警器和远程报警器,所述的本地报警器设置在起重机械驾驶室内。
8.优选地,所述的本地报警器包括声光报警器。
9.优选地,所述的远程报警器包括远程报警终端。
10.优选地,所述的声波发射器为超声波发射器,对应地,所述的第一声波接收器和第二声波接收器均为超声波接收器。
11.优选地,所述的声波发射器、第一声波接收器和第二声波接收器分别通过通信模块连接至所述的控制器。
12.优选地,所述的通信模块包括无线通信模块。
13.优选地,所述的控制器包括单片机、dsp中的任意一种。
14.一种起升高度监测方法,该方法基于所述的起升高度监测系统,该方法包括:
15.控制器控制声波发射器、第一声波接收器和第二声波接收器运行;
16.声波发射器根据控制信号向第一声波接收器和第二声波接收器发送声波信号,第一声波接收器和第二声波接收器实时接收声波信号,控制器根据声波收发时间间隔计算第一声波接收器与声波发射器之间距离为l1,第二声波接收器与声波发射器之间距离为l2;
17.获取第一声波接收器和第二声波接收器间距d1、回转平台表面与地面距离h1以及吊具顶部与挂钩末端距离h2;
18.计算起升高度h:
19.h=h
c
h1‑
h2[0020][0021]
其中,h
c
为吊具顶部与回转平台表面之间的垂直距离。
[0022]
与现有技术相比,本发明具有如下优点:
[0023]
(1)本发明通过在吊具和回转部件上分别设置声波发射装置和声波接收装置,方便实现对起升高度的实时监测,测量方便且准确度高;
[0024]
(2)本发明设置报警器,在起升高度超限时能够及时报警,保证设备安全。
附图说明
[0025]
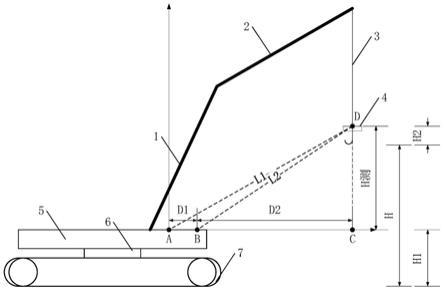
图1为本发明一种起升高度监测系统的结构示意图;
[0026]
图中,1为主臂,2为副臂,3为钢丝绳,4为吊具,5为回转平台,6为回转支撑,7为履带。
具体实施方式
[0027]
下面结合附图和具体实施例对本发明进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本发明并不意在对其适用物或其用途进行限定,且本发明并不限定于以下的实施方式。
[0028]
实施例
[0029]
如图1所示,本实施例以履带起重机为例提供一种起升高度监测系统,履带起重机包括回转平台5,回转平台5通过回转支撑6安装在履带7上,起重机臂架包括主臂1和副臂2,副臂2末端设置钢丝绳3,钢丝绳3末端为吊具4,吊具4下方为挂钩。
[0030]
本实施例提供的起升高度监测系统包括声波发射器、第一声波接收器和第二声波接收器,声波发射器设置在起重机械的吊具4顶部,第一声波接收器和第二声波接收器设置在起重机械回转平台5表面,第一声波接收器和第二声波接收器间隔一定距离且两者连线与起重机械回转中心轴线垂直相交,该系统还包括用于存储第一声波接收器和第二声波接收器间距、回转平台表面与地面距离以及吊具顶部与挂钩末端距离的存储器,该系统还包括用于控制声波发射器、第一声波接收器和第二声波接收器、获取两个声波接收器与声波发射器之间距离、获取存储器中距离信息并计算得到起升高度的控制器,控制器分别连接声波发射器、第一声波接收器、第二声波接收器和存储器,控制器包括单片机、dsp中的任意一种,本实施例中采用单片机。
[0031]
该系统还包括用于起升高度超限报警的报警器,报警器连接控制器。报警器包括
本地报警器和远程报警器,本地报警器设置在起重机械驾驶室内,本地报警器包括声光报警器,远程报警器包括远程报警终端,如pc机、手持终端设备等。在起升高度超限时能够及时报警,保证设备安全。
[0032]
声波发射器为超声波发射器,对应地,第一声波接收器和第二声波接收器均为超声波接收器。声波发射器、第一声波接收器和第二声波接收器分别通过通信模块连接至控制器,通信模块包括无线通信模块。
[0033]
一种起升高度监测方法,该方法基于起升高度监测系统,该方法包括:
[0034]
控制器控制声波发射器、第一声波接收器和第二声波接收器运行;
[0035]
声波发射器根据控制信号向第一声波接收器和第二声波接收器发送声波信号,声波频率为100khz,发射频率为1hz,声波发射器接收到控制信号,以1hz频率,向第一声波接收器和第二声波接收器发射频率为100khz的声波,第一声波接收器和第二声波接收器实时接收声波信号,控制器根据声波收发时间间隔计算第一声波接收器与声波发射器之间距离为l1,第二声波接收器与声波发射器之间距离为l2;
[0036]
获取第一声波接收器和第二声波接收器间距d1、回转平台表面与地面距离h1以及吊具顶部与挂钩末端距离h2;
[0037]
直角
△
pac中:
[0038]
直角
△
pbc中:
[0039]
由此得到:
[0040][0041]
h
c
为吊具顶部与回转平台表面之间的垂直距离,d2为图中b、c两点之间的距离;
[0042]
计算起升高度h:
[0043]
h=h
c
h1‑
h2[0044]
如l1=15m,l2=14.5m,d1=1m,h1=1m,h2=0.5m,则h
c
=13.33m,
[0045]
计算得到h=13.83m。
[0046]
上述实施方式仅为例举,不表示对本发明范围的限定。这些实施方式还能以其它各种方式来实施,且能在不脱离本发明技术思想的范围内作各种省略、置换、变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

