1.本发明涉及自动化装备,具体是一种悬挂链物料自动取放装置。
背景技术:
2.在生产及组装装配车间,悬挂链输送已经成为常用配置。悬挂链包括链条、链条上均匀连接多个悬杆,每个悬杆的下端连接料斗。在输送至不同工位时,通常需要将料斗内的物料取下,完成该工位作业后,需再将物料送回料斗上。因悬挂链输运过程中,一方面料斗不可避免地发生晃动,另外一方面链条的速度存在波动,造成取放失误,给自动化的实现造成困难,这已成为本领域的亟待解决的技术难题。
技术实现要素:
3.为解决上述技术难题,本发明提供一种悬挂链物料自动取放装置,所采取的技术方案之一是:一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,其特征在于,在机器人取下或送回物料的工位对应的轨道的下方固设安装架,所述安装架上安装光电开关并固设一个以上的夹紧气缸,控制装置根据接收到所述光电开关的感应信号控制驱动所述驱动轮的驱动电机暂停、控制所述夹紧气缸夹紧与所述悬挂链条连接的悬杆、控制所述机器人取下或送回物料。
4.进一步地,在所述机器人取下或送回物料后,所述控制装置控制所述夹紧气缸松开所述悬杆、控制所述驱动电机恢复运转。
5.所采取的另一技术方案是:一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,其特征在于,在驱动悬挂链条沿轨道运行的驱动轮的中心轴上固接编码器;在机器人取下或送回物料的工位对应的、所述轨道的直线段上固设直线滑台和光电开关,所述直线滑台的滑块被滑台电机驱动可直线往复运动,所述滑块上固设安装架,所述安装架上固设一个以上的夹紧气缸;控制装置根据接收到所述编码器检测到的速度信号控制所述滑台电机的转速以与所述悬挂链条同步运动、接收到所述光电开关的感应信号控制所述夹紧气缸夹紧与所述悬挂链条连接的悬杆、控制所述机器人与所述悬挂链条同步运动并取下或送回物料。
6.进一步地,在所述机器人取下或送回物料后,所述控制装置控制所述夹紧气缸松开所述悬杆、控制所述滑台电机反向旋转以复位。
7.与现有技术相比,本发明通过夹紧气缸夹紧悬挂链条上的悬杆,解决了料斗的晃动难题,杜绝了机器人或其他取放设备的取放失误,给实现自动化提供保证。
附图说明
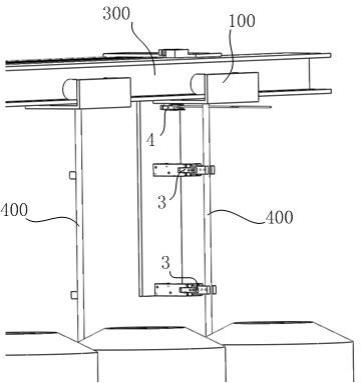
8.图1是实施例2的结构示意图。
9.图2是图1另一视角的局部放大图。
具体实施方式
10.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
11.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
12.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
13.以下结合附图对本发明作进一步详细说明。
14.实施例1,参考图1
‑
2,一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,在机器人取下或送回物料的工位对应的轨道300的下方固设安装架2,所述安装架2上安装光电开关4并固设1个夹紧气缸3,控制装置根据接收到所述光电开关4的感应信号控制驱动所述驱动轮200的驱动电机暂停、控制所述夹紧气缸3夹紧与所述悬挂链条100连接的悬杆400、控制所述机器人取下或送回物料。在所述机器人取下或送回物料后,所述控制装置控制所述夹紧气缸3松开所述悬杆400、控制所述驱动电机恢复运转。
15.本实施例通过夹紧气缸夹紧悬挂链条上的悬杆,解决了料斗的晃动难题,杜绝了机器人或其他取放设备的取放失误,给实现自动化提供保证。
16.实施例2,如图1
‑
2所示,一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,在驱动悬挂链条100沿轨道300运行的驱动轮200的中心轴上固接编码器1;在机器人取下或送回物料的工位对应的、所述轨道300的直线段上固设直线滑台500和光电开关4,所述直线滑台500的滑块被滑台电机600驱动可直线往复运动,所述滑块上固设安装架2,所述安装架2上固设一个以上的夹紧气缸3;控制装置根据接收到所述编码器1检测到的速度信号控制所述滑台电机的转速以与所述悬挂链条100同步运动、接收到所述光电开关4的感应信号控制所述夹紧气缸3夹紧与所述悬挂链条100连接的悬杆400、控制所述机器人与所述悬挂链条100同步运动并取下或送回物料。在所述机器人取下或送回物料后,所述控制装置控制所述夹紧气缸3松开所述悬杆400、控制所述滑台电机反向旋转以复位。
17.本实施例在实施例1的基础上通过直线滑台实现悬挂链条在正常不停歇运转的同时能够使悬杆停止晃动,大大提高了生产效率。
18.以上所述,仅是本发明的较佳实施例而已,并非对本发明做任何形式的限制;任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的方法和技术内容对本发明的技术方案做出许多可能的变动或修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同替换、等效变化及修饰,均仍属于本发明技术方案保护的范围内。
技术特征:
1.一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,其特征在于,在机器人取下或送回物料的工位对应的轨道(300)的下方固设安装架(2),所述安装架(2)上安装光电开关(4)并固设一个以上的夹紧气缸(3),控制装置根据接收到所述光电开关(4)的感应信号控制驱动所述驱动轮(200)的驱动电机暂停、控制所述夹紧气缸(3)夹紧与所述悬挂链条(100)连接的悬杆(400)、控制所述机器人取下或送回物料;在所述机器人取下或送回物料后,所述控制装置控制所述夹紧气缸(3)松开所述悬杆(400)、控制所述驱动电机恢复运转;在所述机器人取下或送回物料后,所述控制装置控制所述夹紧气缸(3)松开所述悬杆(400)、控制所述滑台电机反向旋转以复位。2.一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,其特征在于,在驱动悬挂链条(100)沿轨道(300)运行的驱动轮(200)的中心轴上固接编码器(1);在机器人取下或送回物料的工位对应的、所述轨道(300)的直线段上固设直线滑台(500)和光电开关(4),所述直线滑台(500)的滑块被滑台电机(600)驱动可直线往复运动,所述滑块上固设安装架(2),所述安装架(2)上固设一个以上的夹紧气缸(3);控制装置根据接收到所述编码器(1)检测到的速度信号控制所述滑台电机的转速以与所述悬挂链条(100)同步运动、接收到所述光电开关(4)的感应信号控制所述夹紧气缸(3)夹紧与所述悬挂链条(100)连接的悬杆(400)、控制所述机器人与所述悬挂链条(100)同步运动并取下或送回物料。
技术总结
本发明涉及自动化装备,具体是一种悬挂链物料自动取放装置,包括取下或送回物料的机器人,在机器人取下或送回物料的工位对应的轨道的下方固设安装架,所述安装架上安装光电开关并固设一个以上的夹紧气缸,控制装置根据接收到所述光电开关的感应信号控制驱动所述驱动轮的驱动电机暂停、控制所述夹紧气缸夹紧与所述悬挂链条连接的悬杆、控制所述机器人取下或送回物料。与现有技术相比,本发明通过夹紧气缸夹紧悬挂链条上的悬杆,解决了料斗的晃动难题,杜绝了机器人或其他取放设备的取放失误,给实现自动化提供保证。给实现自动化提供保证。给实现自动化提供保证。
技术研发人员:李军峰 史大浩 尹臣林 刘泽霖 隋安东 冯晓明 刘明远 艾虎
受保护的技术使用者:烟台艾迪艾创机器人科技有限公司
技术研发日:2021.07.21
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

