1.本实用新型涉及一种送料机构,具体涉及一种鸡爪切割机用上料机构。
背景技术:
2.鸡爪在初步加工时,为了食品卫生,往往需要将鸡爪的脚指甲等部位切除,现有的鸡爪切割机,在切割鸡爪的脚趾时,往往需要人工抓取鸡爪的胫部,然后将鸡爪下压,使得鸡爪的五根趾展开,这样才能更好更精确的对其进行切割加工,加工效率低下,切割精度难以控制,自动化程度低,劳动强度较大。
技术实现要素:
3.针对上述现有技术的不足,本实用新型的目的在于解决现有鸡爪切割机在加工时,送料困难,自动化程度低,切割精度难以控制,传统的送料机不能使鸡爪的脚趾展开的技术问题。
4.为了解决上述技术问题,本实用新型采用了如下的技术方案:
5.一种鸡爪切割机用上料机构鸡爪切割机用上料机构,包括水平底座,在所述水平底座上方设有z轴驱动装置,所述z轴驱动装置包括竖向安装在水平底座上的第一导轨组件,在所述第一导轨组件的一侧竖向设有主支撑臂,所述主支撑臂的下端与第一导轨组件滑动配合连接,并在该端设有第一驱动电机,用于驱动主支撑臂沿第一导轨组件竖向移动;在所述主支撑臂的上端设有x轴驱动装置,所述x轴驱动装置包括水平设置的第二导轨组件和其上方的副支撑臂,所述副支撑臂的一端与第二导轨组件滑动配合连接,并在该端设有第二驱动电机,用于驱动副支撑臂沿第二导轨组件水平移动;所述副支撑臂的另一端设有一抓取装置,所述抓取装置包括与副支撑臂固定连接的连接板和竖向设置在该连接板上的安装板,在所述安装板上设有转动臂,所述转动臂一端与安装板转动连接,另一端设有气动手指,并所述转动臂能够在竖直平面内转动;在所述连接板上还设有第三驱动电机,用于驱动转动臂转动。
6.这样,通过z轴驱动装置和x轴驱动装置的配合,实现自动将抓取装置进行上下和前后(即沿x轴向)的移动,自动将鸡爪抓取并送入鸡爪切割机的切割台上,进一步通过可转动的转动臂,使夹持在气动手指上鸡爪产生向下的压力,迫使鸡爪的五根脚趾展开,以便于鸡爪切割机对其进行精确快速的切割加工,自动化送料,加工效率高。
7.进一步的,所述第一导轨组件包括与水平底座固定连接的底板,在所述底板上竖向设有断面呈u形的第一导轨槽,在该第一导轨槽的槽底沿竖向设有第一滑轨和第一驱动齿条,所述主支撑臂上设有与第一滑轨滑动配合的卡槽;所述第一驱动电机的电机轴垂直于第一导轨槽的槽底并在电机轴上设有第一驱动齿轮,所述第一驱动齿轮与第一驱动齿条啮合。这样,通过第一驱动电机与第一驱动齿条的配合,驱动主支撑臂沿第一滑轨上下滑动,以实现抓取装置的上下移动,进而方便的将鸡爪垂直输送至设定高度。
8.进一步的,在所述第一导轨槽背离主支撑臂的一侧竖向设有一支撑板,在该支撑
板上设有多个加强筋,并所述支撑板与底板固定连接。这样,使主支撑臂更加的稳定,提高强度。
9.进一步的,所述第二导轨组件包括断面呈u形的第二导轨槽,在该第二导轨槽的槽底沿水平方向设有第二滑轨和第二驱动齿条,所述副支撑臂上设有与第二滑轨滑动配合的卡槽;所述第二驱动电机的电机轴垂直于第二导轨槽的槽底并在其电机轴上设有第二驱动齿轮,所述第二驱动齿轮与第二驱动齿条啮合。这样,通过第二驱动电机和第二驱动齿条的配合,使抓取装置能够精确的将鸡爪水平送入切割机的切割台上,方便快捷,鸡爪的位置更加精确。
10.进一步的,在所述第二导轨组件的两端设有x轴限位板;所述x轴限位板的断面呈倒置的u形,并固定套设在第二导轨槽上。这样,通过设置x轴限位板,一方面用于保护第二导轨组件,另一方面对第二滑轨起到限位作用,使鸡爪的送入位置更加精确和易于控制。
11.进一步的,在所述第二导轨槽宽度方向的一侧还设有z轴限位板。这样,通过z轴限位板对第一滑轨进行限位,同时也能够对该设备起到一定的保护作用,防止污物落入设备中损坏设备。
12.进一步的,在所述安装板上设有减速机,所述减速机与转动臂连接;所述减速机的转动轴与第三驱动电机的电机轴通过皮带传动或者链传动连接,用于驱动转动臂转动。这样,通过减速机使转动臂产生较大的扭矩,使鸡爪的五根趾更好的展开,使鸡爪的切割加工更加精确快速,提高加工效率。
13.进一步的,在所述转动臂背离气动手指的一端设有一凸起,并在安装板上设有与该凸起相配合的转动监测传感器。这样通过转动监测传感器可以对转动臂的转动角度及归位进行监测,以更好地监控转动臂的扭矩以及间接反映出鸡爪的展开情况。
附图说明
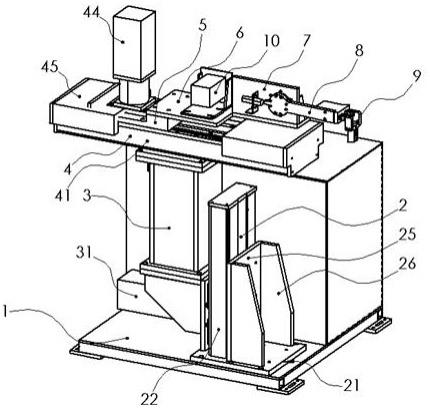
14.图1为本实用新型的结构示意图;
15.图2为本实用新型展示z轴驱动装置的局部结构示意图;
16.图3为本实用新型展示x轴驱动装置的局部结构示意图;
17.图4为本实用新型对于图1的背侧结构示意图;
18.图中,水平底座1,第一导轨组件2,底板21,第一导轨槽22,第一驱动齿条23,第一滑轨24,支撑板25,加强筋26,主支撑臂3,第一驱动电机31,第二导轨组件4,第二导轨槽41,第二驱动齿条42,第二滑轨43,第二驱动电机44,x轴限位板45,副支撑臂5,连接板6,安装板7,转动臂8,气动手指9,第三驱动电机10。
具体实施方式
19.下面结合附图和实施例对本实用新型进一步说明。
20.实施例:
21.如图1
‑
4所示,一种鸡爪切割机用上料机构鸡爪切割机用上料机构,包括水平底座1,在所述水平底座1上方设有z轴驱动装置,所述z轴驱动装置包括竖向安装在水平底座1上的第一导轨组件2,在所述第一导轨组件2的一侧竖向设有主支撑臂3,所述主支撑臂3的下端与第一导轨组件2滑动配合连接,并在该端设有第一驱动电机31,用于驱动主支撑臂3沿
第一导轨组件2竖向移动。所述第一导轨组件2包括与水平底座1固定连接的底板21,在所述底板21上竖向设有断面呈u形的第一导轨槽22,在该第一导轨槽22的槽底沿竖向设有第一滑轨24和第一驱动齿条23,所述主支撑臂3上设有与第一滑轨24滑动配合的卡槽,具体的,该第一驱动齿条23的齿面与第一导轨槽22的槽底面相垂直。所述第一驱动电机31的电机轴垂直于第一导轨槽22的槽底并在电机轴上设有第一驱动齿轮,所述第一驱动齿轮与第一驱动齿条23啮合。具体的,在主支撑臂3的下端三角形支架,在该三角形支架的竖直侧开设有一轴孔,所述第一驱动电机31安装在该三角形支架的竖直侧,并其电机轴穿过该轴孔后在其一端安装所述第一驱动齿轮,所述第一驱动齿轮在转动时,在齿轮配合的作用下,能够带动整个z轴驱动装置沿第一驱动齿条23上下移动。通过第一驱动电机31与第一驱动齿条23的配合,驱动主支撑臂3沿第一滑轨24上下滑动,以实现抓取装置的上下移动,进而方便的将鸡爪垂直输送至设定高度。为了提高z轴驱动装置的稳定性,在所述第一导轨槽22背离主支撑臂3的一侧竖向设有一支撑板25,在该支撑板25上设有多个加强筋26,并所述支撑板25与底板21固定连接。这样,使主支撑臂3更加的稳定,提高强度。
22.在所述主支撑臂3的上端设有x轴驱动装置,所述x轴驱动装置包括水平设置的第二导轨组件4和其上方的副支撑臂5,所述副支撑臂5的一端与第二导轨组件4滑动配合连接,并在该端设有第二驱动电机44,用于驱动副支撑臂5沿第二导轨组件4水平移动。所述第二导轨组件4包括断面呈u形的第二导轨槽41,在该第二导轨槽41的槽底沿水平方向设有第二滑轨43和第二驱动齿条42,所述副支撑臂5上设有与第二滑轨43滑动配合的卡槽,具体的,所述第二驱动齿条42的齿面与第二导轨槽41的槽底面相垂直。所述第二驱动电机44的电机轴垂直于第二导轨槽41的槽底并在其电机轴上设有第二驱动齿轮,所述第二驱动齿轮与第二驱动齿条42啮合。这样,通过第二驱动电机44和第二驱动齿条42的配合,使抓取装置能够精确的将鸡爪水平送入切割机的切割台上,方便快捷,鸡爪的位置更加精确。在所述第二导轨组件4的两端设有x轴限位板45;所述x轴限位板45的断面呈倒置的u形,并固定套设在第二导轨槽41上。这样,通过设置x轴限位板45,一方面用于保护第二导轨组件4,另一方面对第二滑轨43起到限位作用,使鸡爪的送入位置更加精确和易于控制。在所述第二导轨槽41宽度方向的一侧还设有z轴限位板。这样,通过z轴限位板对第一滑轨24进行限位,同时也能够对该设备起到一定的保护作用,防止污物落入设备中损坏设备。
23.所述副支撑臂5的另一端设有一抓取装置,所述抓取装置包括与副支撑臂5固定连接的连接板6和竖向设置在该连接板6上的安装板7,在所述安装板7上设有转动臂8,所述转动臂8一端与安装板7转动连接,另一端设有气动手指9,并所述转动臂8能够在竖直平面内转动;在所述连接板6上还设有第三驱动电机10,用于驱动转动臂8转动。在所述安装板7上设有减速机,所述减速机与转动臂8连接;所述减速机的转动轴与第三驱动电机10的电机轴通过皮带传动或者链传动连接,用于驱动转动臂8转动。
24.工作过程中,气动手指9在z轴驱动装置的带动下,向下移动至待抓取的鸡爪位置,气动手指9抓取鸡爪的胫部,然后z轴驱动装置带动气动手指9提升至设定高度,此时x轴驱动装置工作,将气动手指9沿x轴向移动设定距离后,气动手指9上的鸡爪位于鸡爪切割机的切割台上方设定位置,再次通过z轴驱动装置调整鸡爪的高度至设定高度,然后启动第三驱动电机10,使转动臂8转动,对鸡爪实现一定的向下的压力,迫使其脚趾展开。本实用新型通过z轴驱动装置和x轴驱动装置的配合,实现自动将抓取装置进行上下和左右的移动,自动
将鸡爪抓取并送入鸡爪切割机的切割台上,进一步通过可转动的转动臂8,使夹持在气动手指9上鸡爪产生向下的压力,迫使鸡爪的五根脚趾展开,以便于鸡爪切割机对其进行精确快速的切割加工,自动化送料,加工效率高。通过减速机使转动臂8产生较大的扭矩,使鸡爪的五根趾更好的展开,使鸡爪的切割加工更加精确快速,提高加工效率。
25.在所述转动臂8背离气动手指9的一端设有一凸起,并在安装板7上设有与该凸起相配合的转动监测传感器。这样通过转动监测传感器可以对转动臂8的转动角度及归位进行监测,以更好地监控转动臂8的扭矩以及间接反映出鸡爪的展开情况。
26.本实用新型通过采用z轴驱动装置和x轴驱动装置实现鸡爪的位置输送,进一步通过转动臂和气动手指实现鸡爪的下压,使鸡爪的脚趾由常态下的握持状态变为展开状态,以使鸡爪切割机更加高效、自动、精确的对其进行切割加工,自动化程度高,加工效率高。
27.最后需要说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制技术方案,尽管申请人参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,那些对本实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本实用新型的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。