1.本发明涉及机器人行走技术领域,尤其涉及一种单腿连续弹跳陀螺机器人的弹跳机构。
背景技术:
2.弹跳机器人作为智能机器人发展的重要组成部分,具有机动性能强、在崎岖地形移动速度快、越障能力强、运动落点离散化、对复杂地形的适应性强、运动的突发性和爆发性有利于机器人躲避危险等优点,当机器人具有行动能力后,在某些方面就拥有帮助或替代人类的潜力,例如在抢险救灾、军事侦查、森林防护、外星探索、反恐防爆、地质勘查等不适合人类作业的领域均具有良好的应用前景。随着技术的不断成熟,腿式机器人已经具有自主行走的能力,为进一步探索腿式机器人运动能力及仿生特性,需要提高和扩展腿式机器人运动能力。对此公开号为cn109899338a的中国专利提供了一种燃爆
‑
电磁复合驱动弹跳机构用于弹跳机器人的技术方案,基本原理为通过点燃气缸活塞组件中的燃料推动活塞对外做功,进而推动缸体以及直线电机整体向上运动,从而实现离地的弹跳运动;再由直线电机带动活塞复位,进行下一次弹跳预备。该技术方案虽然能驱动弹跳机器人连续弹跳,但是由于是需要过程中不断的点燃燃料、充排废气,弹跳的稳定性及可靠性均较差;同时,使用设备如气缸活塞及直线电机、燃料及氧化剂等价格昂贵,设计成本较高。
技术实现要素:
本发明的目的是为了解决背景技术中提及的问题,提供一种单腿连续弹跳陀螺机器人的弹跳机构,该机构具有弹跳稳定性好且设计成本低的优点。
3.为实现上述技术目的,本发明采取的技术方案为:一种单腿连续弹跳陀螺机器人的弹跳机构,包括一竖直的支撑腿,所述支撑腿的上侧设有电动陀螺组件,其特征在于,所述支撑腿环绕其外壁设有弹簧,所述弹簧的上端与支撑腿的外壁固定连接,所述弹簧的下端设有水平的弹簧导向拉垫;所述支撑腿具有贯穿其底端的安装内腔,所述安装内腔的一侧设有循环拉动装置,所述弹簧导向拉垫的顶部设有延伸至安装内腔中的拉杆,所述拉杆上设有承拉部,所述循环拉动装置能够通过承拉部周期性地向上拉动或松开拉杆进而压缩或松脱弹簧;所述弹簧导向拉垫能够跟随弹簧周期性地向下运动以顶推其支撑面,进而完成连续弹跳动作。
4.进一步地,所述循环拉动装置包括小驱动电机;所述支撑腿的外壁上设有贯穿至安装内腔中的小步进电机固定孔,所述小驱动电机固定安装于小步进电机固定孔内,并且所述小驱动电机的输出轴通过小步进电机固定孔延伸至安装内腔中;所述小驱动电机延伸至安装内腔中的输出轴上设有主动皮带轮,所述主动皮带轮的下方还设有与其相配合的从动皮带轮,所述主动皮带轮与从动皮带轮之间设有皮带,所述皮带上固定设有拉块;所述拉杆杆壁上的承拉部为与拉块相对应的承拉槽,所述承拉槽从拉杆的杆壁向拉杆的杆芯横向开设;启动小驱动电机,所述主动皮带轮能够带动皮带绕着主动皮带轮以及从动皮带轮循
环转动,而所述拉块能够跟随皮带做循环运动并周期性的向上拉动或脱离承拉槽,从而通过拉杆周期性的压缩或松脱弹簧以完成机器人连续弹跳的动作。
5.进一步地,所述支撑腿对应于小步进电机固定孔下方的侧壁上设有固定销孔,小轴承通过固定销安装于固定销孔中,所述从动皮带轮安装于小轴承外圈上。
6.进一步地,所述固定销与支撑腿外壁相对应的端部不伸出固定销孔对应的孔口处;所述拉块伸入拉杆承拉槽中的长度小于承拉槽的槽深度。
7.进一步地,所述支撑腿的大轴承孔与安装内腔之间设有将两者相隔开的固定隔板,所述固定隔板上设有竖直的套筒孔,所述套筒孔内设有套筒,所述拉杆穿入套筒内并且能够在套筒内上下滑动,所述套筒的筒壁外侧上设有面向皮带的开口,所述弹簧处于自然状态时,所述拉杆上的承拉槽位于套筒上的开口间。
8.进一步地,所述支撑腿为直筒状,所述支撑腿的底端向上开设导向槽,所述导向槽槽底高度不高于固定销孔的底缘;所述弹簧导向拉垫的顶部固定设有导向板,所述导向板能够在导向槽内上下滑动,从而弹簧导向拉垫能够沿着支撑腿上下移动。
9.进一步地,所述支撑腿的外壁下侧设有弹簧固定垫,所述弹簧的顶端固定连接于弹簧固定垫的下侧;所述弹簧处于自然长度时,弹簧导向拉垫位于支撑腿的下方。
10.进一步地,所述小步进电机固定孔开设在弹簧固定垫的上方,所述固定销孔与小步进电机固定孔的开孔角度保持一致,以保证主动皮带轮与从动皮带轮的安装方向能够保持一致。
11.进一步地,所述套筒的上端面与套筒孔上端孔口之间预留间隙,以防止弹跳时的震动通过套筒传递至大驱动电机上。
12.进一步地,所述电动陀螺组件包括:环形支撑架与转子、大驱动电机,所述支撑架安装在支撑腿上,所述支撑腿的上端与支撑架的环形内壁之间设置大驱动电机,所述大驱动电机的顶端具有大驱动电机输出轴,所述大驱动电机输出轴的顶端穿过支撑架的顶部并且通过螺栓螺母组件将其固定,所述大驱动电机的底端固定设有轴承销,所述支撑腿的上端设有大轴承孔,大轴承固定安装于大轴承孔内,所述轴承销的底端安装于大轴承的内圈中,转子固定安装于大驱动电机的外侧。
13.本发明具有以下优点:1、本发明利用陀螺转子高速旋转带来的稳定性,可以使安装在陀螺下方的支撑腿保持稳定站立;循环拉动装置中的皮带上升阶段通过拉块接触并拉动拉杆上的承拉槽,进而完成弹簧的压缩过程;同时利用皮带运转过程中需要转向这一特点,使得在皮带转向的同时拉块与承拉槽脱离,完成瞬时释放弹簧的弹性势能;释放的弹性势能通过弹簧导向拉垫作用于支撑面(地面)上,进而完成弹跳动作;弹跳结构可靠且稳定。
14.2、本发明在陀螺机器人弹跳时,保持导向板与对应的导向槽始终不脱离,限制机器人连续弹跳时的自由度,防止弹簧受力弯曲时出现卡弹簧现象;进一步增强机器人弹跳时的稳定性及可靠性。
15.3、本发明中通过传动带式循环拉动装置与拉杆相配合,带动弹簧压缩或松脱进而积聚弹或释放弹性势能,并将弹性势能的变化转化为弹簧导向拉垫对地的弹跳动作,整体传动过程及结构均相对简单,连续弹跳时速度快,并且设计成本不高。
附图说明
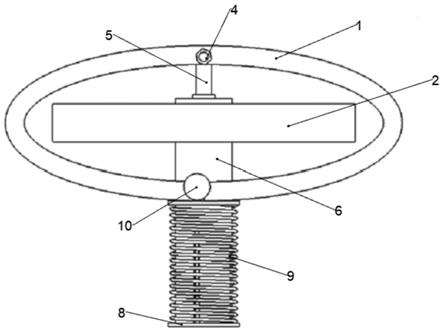
16.图1是本发明的整体侧视结构示意图;图2是本发明的整体轴侧结构示意图;图3是本发明的整体剖面结构示意图;图4是图2中支撑腿内部组件的整体结构示意图;图5是图2中支撑腿内部组件的轴侧结构示意图;图6是图2中支撑腿内部组件的俯视结构示意图;图7是图2中支撑腿的结构示意图。
17.图中标记名称:支撑架1、转子2、大驱动电机3、螺栓螺母组件4、大驱动电机输出轴5、支撑腿6、弹簧固定垫7、弹簧导向拉垫8、弹簧9、小驱动电机10、主动皮带轮11、皮带12、固定销13、从动皮带轮14、拉块15、导向板16、拉杆17、套筒18、小轴承19、大轴承20、大轴承孔21、套筒孔22、小步进电机固定孔23、固定销孔24、导向槽25、轴承销26。
具体实施方式
18.以下结合附图对本发明的实施例作进一步详细描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。
19.第一实施例:参考图1~2所示,本实施例的一种单腿连续弹跳陀螺机器人的弹跳机构,包括:竖直的支撑腿6、电动陀螺组件、循环拉动装置、拉杆17、弹簧9以及弹簧导向拉垫8;电动陀螺组件安装于支撑腿6的上侧,弹簧9环绕于支撑腿6外壁下侧并且弹簧9的上端与支撑腿6的外壁固定连接,弹簧导向拉垫8固定连接于弹簧9的下端;通过弹簧导向拉垫8与地面相接触进而为机器人提供反向支撑力,以使其能够完成弹跳动作。
20.优选地,支撑腿6的外壁下侧设有弹簧固定垫7,弹簧9的顶端固定连接于弹簧固定垫7的下侧;弹簧9处于自然长度时,弹簧导向拉垫8位于支撑腿6的下方。
21.本实施例中,电动陀螺组件包括:环形支撑架1与转子2、大驱动电机3、大轴承20以及轴承销26,环形支撑架1安装在支撑腿6上,支撑腿6的上端与支撑架1的环形内壁之间设置大驱动电机3,大驱动电机3的顶端具有大驱动电机输出轴5,大驱动电机输出轴5的顶端穿过支撑架1的顶部并且通过螺栓螺母组件4将其固定,大驱动电机3的底端固定设有轴承销26,支撑腿6的上端设有大轴承孔21,大轴承20固定安装于大轴承孔21内,轴承销26安装于大轴承20的内圈中,转子2固定安装在大驱动电机3的外侧。
22.具体地,大驱动电机输出轴5上开设有横向通孔,支撑架1顶端开设有与横向通孔相对应的连接孔,使用螺栓螺母组件4穿过连接孔及横向通孔将大驱动电机输出轴5固定于支撑架1上。轴承销26的一端固定于大驱动电机3的下方,其另一端安装在大轴承20的内圈中,当拿起支撑架1启动大驱动电机3时,只有转子2部分旋转,其余部分不会旋转。
23.参考图3~7所示,支撑腿6具有一贯穿其底端的安装内腔,循环拉动装置设置于安装内腔的一侧,弹簧导向拉垫8的顶部设有延伸至安装内腔中的拉杆17,拉杆17上设有承拉部,循环拉动装置能够通过承拉部周期性地向上拉动或松开拉杆17进而压缩弹簧9以积聚弹性势能或松脱弹簧9以释放弹性势能;而弹簧导向拉垫8则能够跟随弹簧9周期性地向下运动以顶推其支撑面,进而完成连续弹跳动作。
24.本实施例中,循环拉动装置包括小驱动电机10、主动皮带轮11、皮带12、固定销13、小轴承19、从动皮带轮14以及拉块15;支撑腿6的外壁上设有贯穿至安装内腔中的小步进电机固定孔23,小驱动电机10固定安装于小步进电机固定孔23内,并且小驱动电机10的输出轴通过小步进电机固定孔23延伸至安装内腔中;主动皮带轮11与小驱动电机10输出轴固定连接,主动皮带轮11的下方还设有与其相配合的从动皮带轮14,皮带12连接于主动皮带轮11与从动皮带轮14之间,拉块15固定在皮带12上。
25.其中,拉杆17的杆壁上的承拉部为与拉块15相对应的承拉槽,承拉槽从拉杆17的杆壁向拉杆17的杆芯横向开设。
26.使用时,启动小驱动电机10,主动皮带轮11能够带动皮带12绕着主动皮带轮11以及从动皮带轮14循环转动,而拉块15能够跟随皮带12做循环运动并周期性的向上拉动或脱离承拉槽,从而通过拉杆17周期性的压缩或松脱弹簧9以完成机器人连续弹跳的动作。
27.优选地,支撑腿6对应于小步进电机固定孔23下方的侧壁上设有固定销孔24,小轴承19通过固定销13安装于固定销孔24中,从动皮带轮14的从动轴连接于小轴承19的内圈中。
28.优选地,固定销13与支撑腿6外壁相对应的端部不伸出固定销孔24对应的孔口处;拉块15伸入拉杆17中承拉槽的长度小于承拉槽的槽深度。
29.本实施例中,支撑腿6的大轴承孔21与安装内腔之间设有将两者相隔开的固定隔板,固定隔板上设有竖直的套筒孔22,套筒孔22内设有套筒18,拉杆17穿入套筒18内并且能够在套筒18内上下滑动,套筒18的筒壁外侧上设有面向皮带12的开口,弹簧9处于自然状态时,拉杆17上的承拉槽位于套筒18上的开口间。
30.优选地,套筒18的上端面与套筒孔22上端孔口之间预留间隙,以防止弹跳时的震动通过套筒18传递至大驱动电机3上;套筒18与支撑腿6的安装内腔同中心线设置,从而弹簧9在积聚和释放弹性势能时受力均匀,不易出现卡弹簧的现象。
31.本实施例中,支撑腿6为直筒状,支撑腿6的底端向上开设导向槽25,导向槽25槽底高度不高于固定销孔24的底缘;弹簧导向拉垫8的顶部固定设有导向板16,导向板16能够在导向槽25内上下滑动,从而带动弹簧导向拉垫8沿着支撑腿6上下移动。
32.优选地,导向槽25沿着支撑腿6的外壁等角度均分开设四组,导向板16为“l”形,在弹簧导向拉垫8上下移动的过程中,导向板16的顶端始终保持不脱离对应的导向槽25。
33.更为具体地,小步进电机固定孔23开设在弹簧固定垫7的上方,固定销孔24与小步进电机固定孔23的开孔角度保持一致,以保证主动皮带轮11与从动皮带轮14的安装方向能够保持一致。
34.本发明提供的一种单腿连续弹跳的陀螺机器人弹跳机构具体的工作过程为:首先拿起陀螺机器人支撑架1,启动大驱动电机3运转,大驱动电机3带动转子2旋转,当转子2高速且稳定旋转时,将陀螺机器人放在地面上,此时启动小驱动电机10运转,小驱动电机10的输出端带动主动皮带轮11转动,主动皮带轮11带动皮带12运转,皮带12带动从动皮带轮14转动,并且皮带12带动拉块15运动,拉块15运动到拉杆17的槽内,拉块15带动拉杆17向上运动,拉杆17带动弹簧导向拉垫8向上运动,导致弹簧导向拉垫8压缩弹簧9,当拉块15运动到皮带12的最高点,并且拉块15的运动方向开始改变,此时拉块15与拉杆17脱离接触,使弹簧9释放弹性势能,弹簧9带动拉杆17和弹簧导向垫8一起向下运动,完成弹跳动作,当拉块15
再次运动到与拉杆17槽接触的最低点时,将重复上述弹跳动作,完成连续弹跳。
35.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

