1.本发明涉及一种用于转动可转向的车轮的装置。
背景技术:
2.已知的车辆转向装置包括可线性移动地实现可转向的车轮的转向运动的转向构件。小齿轮布置成与所述转向构件的齿条部分啮合。转向柱将所述小齿轮和车辆方向盘相互连接。
3.此外,这种已知的转向装置包括与所述转向构件的外螺纹部分连接的滚珠螺母组件。马达与所述滚珠螺母组件连接。可操作所述马达以实现所述滚珠螺母组件相对于所述转向构件的旋转以提供转向辅助。在美国第7,055,646号专利中公开了一种具有这种一般结构的转向装置。
技术实现要素:
4.在一实施例中,一种用于转动可转向的车轮的装置包括具有与车辆方向盘连接的小齿轮的转向柱,从而使得方向盘的旋转导致小齿轮的旋转。电动的转向单元包括具有可绕轴线旋转的第一输出轴的电动机。第一行星齿轮级具有第一齿轮减速比并且由第一输出轴驱动。第二行星齿轮级由第一行星齿轮级和小齿轮驱动并且具有与第一齿轮减速比不同的第二齿轮减速比。第二输出轴由第二行星齿轮级驱动并联接到可转向的车轮,从而使得第二输出轴的旋转影响车轮的转向。
5.在另一实施例中,一种用于转动可转向的车轮的装置包括电动的转向单元,所述车轮通过可由方向盘旋转的小齿轮可操作地连接到方向盘,所述电动的转向单元具有电动机,该电动机具有可绕轴线旋转的第一输出轴。齿轮箱包括具有第一齿轮减速比并由第一输出轴驱动的第一行星齿轮级。第二行星齿轮级由第一行星齿轮级和小齿轮驱动。第二行星齿轮级具有不同于第一齿轮减速比的第二齿轮减速比。第二输出轴由第二行星齿轮级驱动并联接到可转向的车轮,从而使得第二输出轴的旋转影响车轮的转向。控制器响应于方向盘的旋转来控制第一输出轴的旋转。
附图说明
6.在参考附图阅读以下描述后,本发明的上述和其他特征和优点对于本发明所涉及的领域的技术人员将变得显而易见,其中:
7.图1是用于转动可转向的车轮的装置的一实施例的示意图;
8.图2a是图1所示的装置的马达和齿轮箱的前视图;
9.图2b是沿着图2a的线2b
‑
2b剖开的剖视图;
10.图2c是沿着图2a的线2c
‑
2c剖开的剖视图,其中为了清楚起见去除了齿轮箱的一部分;
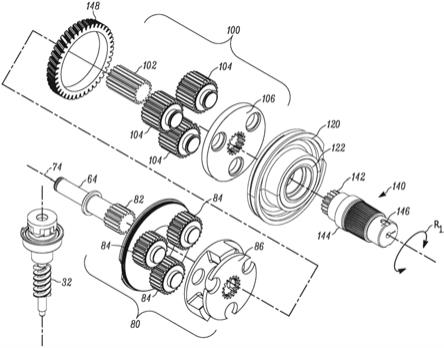
11.图3是图2a所示的齿轮箱的一部分的分解图;
12.图4是用于转动可转向的车轮的马达和齿轮箱的另一实施例的前透视图;
13.图5是图4所示的马达和齿轮箱的后透视图。
具体实施方式
14.本发明涉及一种用于转动可转向的车轮的装置。在图1中示出了用于转动可转向的车轮12的装置10的一实施例。所述装置10可用于商用车辆。所述装置10包括转向柱20和用于提供转向辅助的电动转向单元(eps单元)60。所述转向柱20从第一端22延伸到第二端24。方向盘30连接到所述第一端22。小齿轮32连接到或设置在所述第二端24上。所述方向盘30的旋转经由转向柱20将力传递到所述小齿轮32。换言之,所述小齿轮32在经由转向柱20所传递的力的影响下旋转。
15.转向连杆40连接到可转向的车轮12。如图所示,所述转向连杆40包括第一转向构件42、第二转向构件52和第三转向构件54。所述第一转向构件42连接到eps单元60的输出轴140。所述第一转向构件42例如可以是连杆臂。所述第二转向构件52连接到所述第一转向构件42并且例如可以是拉杆。所述第三转向构件54连接到所述第二转向构件52和其中一个转向轮12。所述第三转向构件54例如可以是转向臂。
16.所述eps单元60响应于方向盘30的旋转,通过影响转向连杆40的运动、进而影响可转向的车轮12的运动来提供转向辅助。进一步参照附图2a
‑
2b,所述eps单元60包括可逆电动机62和连接到电动机的齿轮箱70。所述电动机62具有延伸到齿轮箱70中的输出轴64(参见图3)。所述齿轮箱70包括具有通道73的壳体72,该通道73大致沿着轴线74延伸并完全穿过所述壳体。齿部76沿着通道73的长度设置在所述壳体72上并且围绕轴线74周向地延伸。
17.如图2c所示,所述小齿轮32通过一对轴承36支撑在壳体72中。帽形部38连接到壳体72并且以允许它们之间的相对旋转的方式容纳所述转向柱20的第二端24。扭杆26、输出轴31和联轴器33帮助将转向柱20(用作输入轴)的第二端24的旋转传递到小齿轮32。部件24、26、31、32、33彼此之间同轴。
18.所述扭杆26在转向柱20的第二端24和输出轴31之内延伸。所述扭杆26的第一端27被固定以便与第二端24一起旋转。所述扭杆26的第二端29被固定以便与所述输出轴31一起旋转。当通过方向盘30旋转第二端24时,在第二端和输出轴31一起旋转之前,所述扭杆26允许在第二端24和输出轴31之间发生预先规定程度的相对旋转。所述联轴器33连接到输出轴31,以用于将输出轴的旋转传递到小齿轮32。
19.进一步参考图3,第一行星齿轮级和第二行星齿轮级80、100定位在壳体72内并且沿着轴线74对齐。第一级和第二级80、100彼此串联连接。马达62的输出轴64沿着轴线74朝向第一级80延伸。
20.第一行星齿轮级80包括固定到输出轴64上并可随其旋转的太阳齿轮82。行星齿轮84与太阳齿轮82和壳体72上的齿76啮合。以旋转太阳齿轮82的方式r1旋转输出轴64,导致行星齿轮84旋转并且绕太阳齿轮运行,同时保持与齿76啮合。虽然示出了三个行星齿轮84,但是第一行星齿轮级80可以包括更多或更少的行星齿轮。
21.行星齿轮84可旋转地支撑在支架86上,支架86以随着行星齿轮旋转并且围绕着太阳齿轮72运行的方式r1围绕轴线74旋转。支架86与壳体72径向间隔开。第一行星齿轮级80可以具有从太阳齿轮82到支架86的齿轮减速比r1,例如大约75:1至大约500:1的比例。
22.第二行星齿轮级100包括固定到第一行星齿轮级80的支架86的太阳齿轮102。太阳齿轮102可与支架86一起绕轴线74旋转。行星齿轮104与太阳齿轮102和壳体72上的齿76啮合。以r1的方式旋转太阳齿轮102,从而导致行星齿轮104旋转并绕太阳齿轮旋转,同时保持与齿76的啮合。虽然如图所示示出了三个行星齿轮104,但第二行星齿轮级100可以包括更多或更少的行星齿轮。
23.行星齿轮104可旋转地支撑在支架106上,支架106以随着行星齿轮旋转并且围绕太阳齿轮102运行的方式r1围绕轴线74旋转。支架106与壳体72径向间隔开。第二行星齿轮齿轮级100可以具有从太阳齿轮102到支架106的齿轮减速比r2,例如大约15:1至大约22:1的比例。应当理解的是,齿轮箱70可以包括额外的行星齿轮级(未示出),从而通过齿轮箱实现期望的齿轮减速比。
24.衬套120连接到壳体72并在通道73与马达62相对的端部处关于轴线74对中心。轴承122安装在衬套120中并且可围绕轴线74相对于衬套以方式r1旋转。输出轴140安装在轴承122中。输出轴140包括固定到轴承122上的光滑部分144。花键部分142连接到第二行星齿轮级100的支架106,从而使得支架和输出轴140以方式r1围绕轴线74一起旋转。输出轴140还包括用于连接到转向连杆40的突出部146。
25.齿轮148固定到第一行星齿轮级80的支架86上并且能够以方式r1与其一起旋转。齿轮148也与转向柱20上的小齿轮32(见图2c)啮合。结果,方向盘30的旋转通过小齿轮32传递到齿轮148。小齿轮32和齿轮148可以具有齿轮减速比r3。
26.装置10(见图1)还包括控制器150以及一个或多个车辆状况传感器,它们协作以便基于所探测的车辆状况控制eps单元60。在一实施例中,车辆状况传感器可以包括扭矩传感器152和连接到控制器150的位置传感器154。扭矩传感器152探测施加到方向盘30上的扭矩并产生指示扭矩的信号。位置传感器154探测方向盘30的旋转位置并产生指示方向盘位置的信号。应当理解的是,传感器152、154中的其中一个或两个传感器可以定位在帽形部38内(见图2c)或沿着转向柱20定位。
27.来自扭矩传感器152和位置传感器154的信号被发送到控制器150。控制器150分析传感器152、154的输出并影响eps单元60的马达62的操作作为传感器的输出。还可以设想,仅扭矩传感器152或仅位置传感器154可用于影响马达62的操作。控制器150还可以具有作为探测到的车辆横向加速度的函数而变化的输入(未示出)或其他车辆运行条件。在任何情况下,由控制器150接收到的信号决定了马达62的速度和/或扭矩,从而决定了由输出轴64传递到齿轮箱70的速度和扭矩,以便辅助可转向的车轮12的转向。
28.在操作期间,操作者转动方向盘30从而转动小齿轮32。这进而以第一速度s1和第一扭矩t1以方式r1围绕轴线74转动齿轮148。如上所述,齿轮减速比r3决定了方向盘30旋转和齿轮148旋转之间的关系。
29.同时,控制器150响应于由传感器152、154中的至少一个传感器所接收到的信号来致动马达62以期望的第二速度s2和第二扭矩t2以方式r1旋转输出轴64。在支架86处,输出轴64的第二速度s2由于第一行星齿轮级80的齿轮减速比r1而降低到第一速度s1。换言之,控制器150确保基于齿轮减速比r1来选择第二速度s2,从而使得支架86以与固定到其上的输入齿轮148相同的第一速度s1旋转。因此,控制器150协调输出轴64的旋转与方向盘30的旋转。
30.在支架86处,输出轴64的第二扭矩t2由于齿轮减速比r1而增加到第三扭矩t3。结
果,固定到支架86的第二行星齿轮级100的太阳齿轮102以及输入齿轮148以第一速度s1以等于第一转矩t1和第三转矩t3的总和的第四转矩t4的方式r1旋转。
31.在支架106处,太阳齿轮102的第一速度s1由于第二行星齿轮级100的齿轮减速比r2而降低到第三速度s3。在支架106处,太阳齿轮102的第四扭矩t4由于齿轮减速比r2而增加到第五转矩t5。结果,固定到支架106的输出轴140以第三速度s3以伴随第五转矩t5的方式r1旋转。
32.由以上可知,由方向盘30经由小齿轮32传递至齿轮箱70的第一速度s
l
由于减速比r1和r3的乘积降低。由方向盘30传递到齿轮箱70的第一扭矩t1由于齿轮减速比r1和r3的乘积增加。由马达62的输出轴64传送到齿轮箱70的第二速度s2由于齿轮减速比r2和r3的乘积降低。由马达62的输出轴64传递到齿轮箱70的第二扭矩t2由于齿轮减速比r2和r3的乘积增加。齿轮减速比r1至r3一起在输出轴140处产生期望的第三速度s3和第五扭矩t5。
33.如图1所示,当输出轴140以第三速度s3和第五扭矩t5以方式r1旋转时,固定到其上的第一转向构件42同样以第三速度和第五扭矩以方式r1旋转。第一转向构件42以方式l移动第二转向构件52,其以方式r2枢转第三转向构件54以便使车轮12转向。因此,eps单元60依靠齿轮箱70的机械优势来减少马达62和方向盘30的速度同时增加由此提供的扭矩以向车辆操作者提供转向辅助。
34.由于齿轮箱70和齿轮148的这种配置,装置10能够向操作者提供反馈或转向感觉。换言之,齿轮箱70能够向方向盘30提供相对较低的齿轮减速比r3,而同时通过更高的减速比r1、r2为转向连杆40提供转向辅助。为此,齿轮减速比r3使得操作者对方向盘30的转动在预定范围内、例如从锁定位置旋转到锁定位置。
35.在另一实施例中,如图4至图5所示,多个马达连接到齿轮箱,以便影响可转向的车轮的转向助力。图4至图5中的组件如果与图1至3中的组件相同则给出了相同的附图标记,而相似的组件给出了后缀“a”。
36.如图4至图5所示,两个可逆马达62a固定到齿轮箱70a的壳体72a的相对侧。每个马达62a的输出轴64连接到驱动带170。驱动带170连接到输入轴180,输入轴180固定到第一行星齿轮级80的太阳齿轮82。当两个马达62a都被致动时,驱动带170将扭矩从每个马达传递到齿轮箱70a。应当理解的是,代替同时动作的两个马达62a,两个马达其中之一可以被停用并且仅用于冗余/备份。在任何情况下,传动带170可以具有与输出轴64和/或输入轴180的啮合/齿形连接以帮助减轻滑动。
37.在操作期间,操作者旋转方向盘30从而旋转小齿轮32。这进而以第一速度s1和第一扭矩t1以方式r1围绕轴线74a旋转输入齿轮148。齿轮减速比r3决定了方向盘30旋转和输入齿轮148旋转之间的关系。
38.同时,控制器150响应于由传感器152、154中的至少一个传感器所接收到的信号而致动两个马达62a以第二速度s2和第二扭矩t2围绕各自的轴线66旋转。驱动带170将两个马达62a的旋转传递到输入轴180,从而使得输入轴以及固定到其上的太阳齿轮82以第二速度s2以等于第二扭矩t2的两倍的第六扭矩t6旋转。
39.此后,行星齿轮级80、100与太阳齿轮82和齿轮148协作以调节其速度和扭矩,如先前所述为输出轴140提供为了辅助车轮12的转向而需要的速度和扭矩。更具体地,在支架86处,太阳齿轮82的第二速度s2通过第一行星齿轮级80的齿轮减速比r1降低到第一速度s1。控
制器80确保基于第一速度s1和齿轮减速比r1而选择第二速度s2,从而使得支架86以与固定到其上的输入齿轮148相同的第一速度s1以方式r1旋转。因此,控制器80协调输入轴180的旋转与方向盘30的旋转。
40.在支架86处,输入轴180的第六扭矩t6由于齿轮减速比r1而增加到第七扭矩t7。结果,固定到支架86的第二行星齿轮级100的太阳齿轮102以及输入齿轮148以第一速度s1以等于第六扭矩t6和第七扭矩t7之和的第八扭矩t8以方式r1旋转。
41.在支架106处,太阳齿轮102的第一速度s1由于第二行星齿轮级100的齿轮减速比r2而降低到第三速度s3。在支架106处,太阳齿轮102的第八扭矩t8由于齿轮减速比r2而增加到第九转矩t9。结果,固定到支架106的输出轴140以第三速度s3以第九转矩t9以方式r1旋转。在一实施例中,与两个马达62a的齿轮箱70a相关的第九扭矩t9大于与单个马达62的齿轮箱70相关的第五扭矩t5。因此,齿轮箱70a相比于齿轮箱70能够为更大的车辆提供转向辅助。
42.以上所描述的是本发明的实施例。当然,为了描述本发明的目的,不可能描述组件或方法的每一种可能的组合,但是本领域的普通技术人员会认识到本发明的许多进一步的组合和排列是可能的。因此,本发明旨在包括落入到所附权利要求的精神和范围内的所有此类的变体、修改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

