1.本公开涉及食品加工领域,具体的涉及一种用于鸡翅分割的装置 及方法。
背景技术:
2.在鸡肉加工行业中,企业中对鸡翅的生产分割大多靠人工来完 成,把整个鸡翅分别在鸡翅两关节处用剪刀剪成三段,工作效率低下, 员工需求量大,长时间操作,员工手臂酸痛,造成员工工作满意度较 低。
3.现有的鸡翅切割方式中有的是利用圆形旋转刀片切割机对鸡翅 进行切割,刀具高速旋转,刀具在一个槽内转动,鸡翅顺着与刀具配 合的导杆方向推动移动通过旋转的刀具切割鸡翅,完成鸡翅分割的工 艺。但是此方法首先是对员工没有起到保护作用,刀具的安装位置容 易将员工被刀片刮伤,操作危险性比较大;再者,无法对鸡翅进行定 位切割,一次只能切割一根鸡翅。
4.现有的鸡翅切割方式中有的切割机会对鸡翅定位,但大都是通过 将鸡翅安装在定位槽内进行定位,此种定位方式当鸡翅在旋转过程中 容易受到旋转力或者周围波动造成错位,没有专门针对鸡翅各段的骨 关节的精确的定位,并且现有的定位方式不能随着鸡翅的大小进行弹 性调整,从而无法保证较高的合格率。
技术实现要素:
5.针对现有的技术方案的不足,本发明旨在提供一种用于鸡翅分割 的装置,保证对不同大小鸡翅的各个关节精确定位,实现提高对鸡翅 的切割效率和切割合格率,实现提高鸡翅的切割效率和准确率。
6.为实现上述发明目的,本发明的一个或多个实施例提供了下述技 术方案:
7.第一方面,本发明公开了一种用于鸡翅分割的装置,包括:
8.壳体,用于固定旋转组件、定位组件和刀具组件;
9.旋转组件,包括旋转体,通过旋转体中心位置设置的转轴转动安 装于壳体上;旋转体圆周方向上均匀开设有定位槽;
10.定位组件,固定于壳体内顶部位置,位于旋转组件上方;包括调 整板,调整板包括第一调整板、第二调整板和第三调整板;第一调整 板焊接有第一压力杆,用于定位翅中与翅根之间弯曲段;第二调整板 上设置有弹性压力模块,用于固定翅中与翅根之间的骨关节;第三调 整板上设置有固定导向杆,用于固定翅中与翅根之间的弯曲段。
11.作为进一步的技术方案,壳体包括底座,护罩位于底座顶部与底 座固定连接;旋转组件转动固定于底座上,定位组件和刀具组件固定 于护罩内。
12.作为进一步的技术方案,底座为l型结构,刀具组件位于底座竖 向端面上,与旋转组件距离预设距离。
13.作为进一步的技术方案,定位组件还包括底板,固定于壳体内顶 部位置;底板两侧分别设置有导向板,一侧设置的两个导向板分别连 接导向压力板、切割压力板,另一侧
设置的三个导向板分别连接第一 固定板、第二固定板和第三固定板。
14.作为进一步的方案,导向压力板和切割压力板用于固定翅中与翅 尖之间的弯曲段。
15.作为进一步的技术方案,第一固定板、第二固定板和第三固定板 上开设有滑槽,螺栓穿过滑槽分别将第一调整板连接于第一固定板 上,将第二调整板固定于第二固定板上,将第三调整板固定于第三固 定板上。
16.作为进一步的技术方案,第一调整板包括第一定位板和第二定位 板,第一定位板与第二定位板铰接连接,第一定位板上焊接第一压力 杆,第二定位板滑动并固定连接在第一固定板上;第一定位板上安装 有螺栓杆,弹簧套设于螺栓杆上。
17.作为进一步的技术方案,第二压力杆焊接连接于第一固定板上, 第一固定板长度值低于第一调整板的长度值,第二压力杆沿着竖直方 向位于第一压力杆的上方,第二压力杆用于固定翅根与翅中之间的弯 曲段。
18.作为进一步的技术方案,第二调整板转动连接转动片的一端,转 动片另一端固定连接有弹性压力模块,弹性压力模块的底部连接弹簧 的一端,弹簧的另一端固定在第二调整板上。
19.作为进一步的技术方案,第二调整板靠近旋转体的一端端部连接 定位导向槽,定位导向槽的开口朝向旋转体,用于固定翅中与翅根之 间的骨关节。
20.作为进一步的技术方案,旋转体包括第一旋转模具、第二旋转模 具和第三旋转模具,第一旋转模具、第二旋转模具和第三旋转模具同 轴设置,并通过螺栓固定。
21.作为进一步的技术方案,第一旋转模具上开设第一定位槽,第二 旋转模具上开设第二定位槽,第三旋转模具上开设第三定位槽。
22.作为进一步的技术方案,刀具组件包括上刀具切割架和下刀具切 割架;上刀具切割架上固定上切割刀,用于切割翅中与翅根之间的骨 关节;下刀具切割架固定下切割刀,用于切割翅尖与翅中之间的骨关 节。
23.第二方面,本公开还涉及一种用于鸡翅分割的方法,基于本技术 提出的一种用于鸡翅分割的装置,具体步骤如下:
24.s1:鸡翅放置在旋转体上,鸡翅中部位置放置在第二定位槽中, 鸡翅翅尖位于第一定位槽内,鸡翅翅根位于第三定位槽内;
25.s2:启动电机带动旋转体旋转,鸡翅的两端分别转动到固定导向 杆、导向压力板的下方;固定导向杆将翅中与翅根之间的弯曲部分固 定,导向压力板固定鸡翅的翅中与翅尖之间的弯曲段;将鸡翅的翅中 与翅根部分进一步贴合到第二定位槽、第三定位槽内,并且将翅中与 翅根之间的骨关节自动导入到定位导向槽下方;
26.s3:旋转体继续旋转,鸡翅位于弹性压力模块下方,弹性压力模 块对鸡翅的翅中与翅根之间的骨关节进行弹性定位;鸡翅的翅中与翅 尖之间的弯曲段仍未脱离导向压力板的定位范围;导向压力板继续对 鸡翅的翅中与翅尖之间的弯曲段进行定位;
27.s4:旋转体继续旋转,鸡翅旋转到第一压力杆、第二压力杆的位 置下方;第二压力杆不发生位移,用于固定翅中与翅根之间的弯曲段; 第一压力杆可以相对旋转体进行摆动,根据鸡翅的尺寸自动调节摆动 角度以固定鸡翅的翅中与翅根之间的弯曲段;
28.s5:旋转体继续旋转,翅中与翅根在第二定位槽、第三定位槽内 呈倒放的v字形
状,翅中与翅根之间的骨关节位于v字形状的顶点, 当翅中与翅根之间的骨关节的骨缝到达正对刀具组件的上切割刀刀 刃时,由上切割刀对准翅中与翅根之间的骨关节的骨缝进行切割,将 翅根从鸡翅上切割;
29.s6:当翅中与翅根的骨关节被切割完成后,翅根被切下,剩余的 翅中与翅尖继续在旋转体的第一定位槽、第二定位槽内旋转,通过切 割定位板和导向压力板对鸡翅的翅中与翅尖之间的骨关节定位,翅中 与翅尖在旋转体上呈现正立的v字形状,翅中与翅尖之间的骨关节 在v字形状的最低点,当翅中与翅尖之间的骨关节的骨缝所在的位 置正对刀具组件的下切割刀的刀刃时,由下切割刀对鸡翅的翅中与翅 尖的骨关节的骨缝进行切割。
30.以上一个或多个技术方案的有益效果是:
31.1.定位组件设计可以起到将鸡翅按照骨关节精确的定位,便于后 续针对骨关节位置的精确切割。其中,第一调整板包括两个铰接的第 一定位板和第二定位板,在第一定位板上焊接第一压力杆,第一压力 杆可随着第一定位板的摆动而摆动,并且第一定位板一侧端面上设置 弹簧杆,调整第一定位板的角度带动第一压力杆摆动不同角度以适应 不同鸡翅大小的需要,实现弹性定位。
32.2.本发明的鸡翅分割装置,将鸡翅放置在旋转体的三个定位槽内 时,无需工人调整,放置过程中也无需完全对中,只需放置大致位置 即可,通过本发明的装置自动归正鸡翅的位置并精确切割。
33.3.通过旋转体带动鸡翅旋转,旋转到定位组件的位置时,由定位 组件相应的部件分别对鸡翅的翅尖、翅中和翅根,以及翅尖与翅中的 骨关节、翅中与翅根的骨关节分别进行定位,将鸡翅完全的对应在相 应的定位槽内,鸡翅的翅根与翅中骨关节、鸡翅的翅中与翅尖的骨关 节正好对应在相应的上切割刀的上方与下切割刀的上方,由上切割 刀、下切割刀分别对鸡翅切割,将鸡翅按照需要精确分割成三段。
附图说明
34.下面结合附图和实施例对本发明进一步说明。
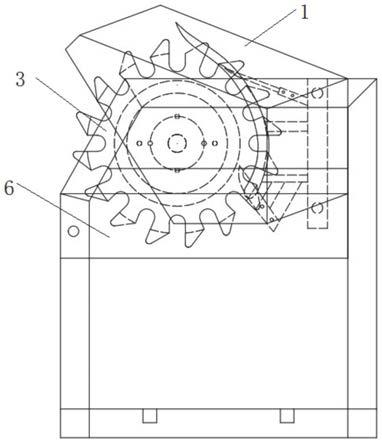
35.图1是本发明结构示意图;
36.图2定位组件结构示意图;
37.图3另一角度定位组件结构示意图;
38.图4刀具组件结构示意图;
39.图5鸡翅放置在旋转组件上的截面示意图;
40.图6另一角度鸡翅放置在旋转组件上的截面示意图;
41.图中,1、壳体,2、定位组件,3、旋转组件,4、刀具组件,5、 护罩,6、底座,7、底板,8、导向板,9、第一固定板,10、第二固 定板,11、第三固定板,12、导向压力板,13、切割定位板,14、第 一调整板,15、第二调整板,16、第三调整板,17、转动片,18、弹 簧压力模块,19、第一压力杆,20、第二压力杆,21、固定导向杆,22、定位导向槽,23、上切割刀架,24、下切割刀架,25、上切割刀, 26、下切割刀,27、翅中与翅根之间的骨关节,28、翅中与翅尖之间 的骨关节。
具体实施方式
42.现在结合附图对本发明做进一步详细的说明。
43.实施例1
44.请参阅如图1
‑
6,本发明公开了一种用于鸡翅分割的装置,包括 壳体1、旋转组件3和定位组件2以及刀具组件4。
45.可以理解的是,为了便于清楚的描述,本实施例中将壳体1的沿 着地面方向的上方定义为上端,下方定义为下端,图中前视图正视的 一面为前端,沿着水平方向与前端相对的一面定义为后端,图中前视 图中位于壳体1的右方定义为右端,位于壳体1的左方定义为左端。
46.壳体1,壳体1用于用于固定旋转组件3、定位组件2和刀具组 件4;其中旋转组件3位于壳体1内,旋转组件3中心位置设置有转 轴,转轴两端通过轴承固定于壳体1的前端和后端。壳体1设置有护 罩5和底座6,底座6位于整个壳体1的下端,底座6呈l型结构, 底座6竖直方向的一端位于壳体1的右端,护罩5位于底座6的顶部 作为整个壳体1的上端,整个壳体1连接成一体化的结构。
47.旋转组件3位于壳体1内,护罩5内固定安装定位组件2,定位 组件2位于旋转组件3的上方,与旋转组件3设定预设的距离,距离 值的设定需要根据实际工程的需要,设定的距离正好处于定位鸡翅的 范围内,定位组件2的作用是用于对旋转组件3上的鸡翅进行定位; 刀具组件4位于壳体1的右端,即呈l型结构的底座6的竖直方向的 一端内,用于对旋转组件3上的鸡翅进行切割。旋转组件3、定位组 件2和刀具组件4均位于壳体1内。壳体1实现固定旋转组件3、定 位组件2和刀具组件4的作用。
48.旋转组件3包括旋转体,旋转体上开设有定位槽,旋转体包括第 一旋转模具、第二旋转模具和第三旋转模具,第一旋转模具、第二旋 转模具和第三旋转模具同轴设置,并通过螺栓固定。第一旋转模具上 开设有第一定位槽,第二旋转模具上开设有第二定位槽,第三旋转模 具上开设有第三定位槽。
49.第一定位槽、第二定位槽和第三定位槽的形状结构均不同,依据 鸡翅的形状进行设定的,第一定位槽的结构如图1所示,一侧开口大 于另一侧的开口,其是根据鸡翅的翅尖的形状做出的改进,翅尖是鸡 翅当中最薄的部位,并且翅尖相对翅中呈一定角度的倾斜,所以,将 一侧开口大于另一侧的开口,开口较大的一侧用于放置倾斜一定角度 的翅尖尖端部分,开口较小的一侧用于夹紧翅尖;第二定位槽开口尺 寸相对第一定位槽较大,用于放置鸡翅的翅中部分,鸡翅的翅中部分 的尺寸较厚,因此开口相对第一定位槽较大;第三定位槽开口边界沿 着旋转体的转轴方向顺延第二定位槽的开口边界,用于固定鸡翅的翅 根部分。
50.旋转体的三个旋转模具是根据鸡翅的形状特制的模具,用于容置 鸡翅并带动鸡翅绕着转轴旋转,旋转到特定位置上时,由刀具组件4 对应鸡翅的特定位置进行切割,实现鸡翅的分割。
51.定位组件2包括底板7,底板7固定位于壳体1的护罩5内,底 板7上固定安装有导向板8,导向板8分别位于底板7沿着转轴轴线 方向的两侧,一侧导向板8设置有两处,另一侧导向板8设置有三处。 设置有两处的导向板8位于底板7靠近壳体1后端的一侧,设置有三 处的导向板8位于底板7靠近壳体1前端的一侧。
52.底板7靠近壳体1后端的一侧的导向板8上分别连接有导向压力 板12、切割定位板;导向压力板12靠近壳体1的左端,切割定位板 靠近壳体1的右端;导向压力板12和切割定位板13用于固定鸡翅的 翅中与翅尖之间的弯曲段部分。
53.底板7靠近壳体1前端的一侧的三个导向板8分别连接第一固定 板9、第二固定板10和第三固定板11。导向板8以及第一固定板9、 第二固定板10和第三固定板11上开设有滑槽,螺栓穿过滑槽分别将 第一调整板14连接于第一固定板9上,将第二调整板15固定于第二 固定板10上,将第三调整板16固定于第三固定板11上。
54.第一调整板14焊接有第一压力杆19,用于定位翅中与翅根之间 弯曲段;第二调整板15上设置有弹性压力模块,用于固定翅中与翅 根之间的骨关节27;第三调整板16上设置有固定导向杆21,用于固 定翅中与翅根之间的弯曲段。
55.其中,第一调整板14包括第一定位板和第二定位板,第一定位 板与第二定位板铰接连接,第二定位板与第一固定板9滑动并固定连 接,第一定位板相对第二定位板摆动,并且,第一定位板位于靠近壳 体1前端的一侧面上垂直连接有螺栓杆,螺栓杆外套设有弹簧,通过 调节弹簧调节第一定位板相对旋转体的角度与距离;在第一定位板上 焊接有第一压力杆19,通过第一定位板的摆动带动第一压力杆19的 摆动,以适应不同鸡翅的尺寸,在第一压力杆19的弹性调节下自动 将鸡翅定位到第三定位槽中。
56.第二定位板上焊接有第二压力杆20,第一定位板长度值低于第 一调整板14的长度值,第二压力杆20位于第一压力杆19的上方, 第二定位杆是不能实现相对转轴轴线方向的摆动,第一压力杆19、 第二压力杆20均用于固定翅根与翅中之间的弯曲段。
57.其中,第二调整板15通过转动片17、弹簧连接弹性压力模块; 转动片17一端与第二调整板15转动连接,另一端固定连接弹性压力 模块底部一侧;弹性压力模块的底部另一侧固定连接弹簧的一端,弹 簧的另一端固定安装于第二调整板15上。弹性压力模块在弹簧的带 动下可实现对鸡翅翅中与翅根之间靠近骨关节的位置的弹性固定,通 过转动片17对弹性压力模块起到支撑作用。
58.第二调整板15靠近旋转体的一端端部连接定位导向槽22,定位 导向槽22的开口朝向旋转体,用于固定翅中与翅根之间的骨关节27。
59.刀具组件4位于壳体1的右端,刀具组件4包括上刀具切割架和 下刀具切割架;上刀具切割架上固定上切割刀25,用于切割翅中与 翅根之间的骨关节27;下刀具切割架固定下切割刀26,用于切割翅 尖与翅中之间的骨关节。
60.实施例2
61.第二方面,本公开还涉及一种用于鸡翅分割的方法,基于本技术 提出的一种用于鸡翅分割的装置,具体步骤如下:
62.s1:鸡翅放置在旋转体上,鸡翅中部位置放置在第二定位槽中, 鸡翅翅尖位于第一定位槽内,鸡翅翅根位于第三定位槽内;
63.s2:启动电机带动旋转体旋转,鸡翅的两端分别转动到固定导向 杆21、导向压力板12的下方;固定导向杆21将翅中与翅根之间的 弯曲部分固定,将鸡翅的翅中与翅根部分进一步贴合到第二定位槽、 第三定位槽内,并且将翅中与翅根之间的骨关节27自动导入到定位 导向槽22下方,由定位导向槽22对鸡翅的翅中与翅根之间的骨关节 27进行定位;
64.所述步骤s2中,导向压力板12固定鸡翅的翅中与翅尖之间的弯 曲段;
65.s3:旋转体继续旋转,鸡翅位于弹性压力模块下方,弹性压力模 块对鸡翅的翅中与翅根之间的骨关节27进行弹性定位;此时,鸡翅 的翅中与翅尖之间的弯曲段仍未脱离导向压力板12的定位范围;导 向压力板12继续对鸡翅的翅中与翅尖之间的弯曲段进行定位;
66.s4:旋转体继续旋转,鸡翅旋转到第一压力杆19、第二压力杆 20的位置下方;第二压力杆20不发生位移,用于固定翅中与翅根之 间的弯曲段;第一压力杆19可以相对旋转体的轴线方向摆动,根据 鸡翅的尺寸自动调节摆动角度以固定鸡翅的翅中与翅根之间的弯曲 段;
67.s4:旋转体继续旋转,翅中与翅根在第二定位槽、第三定位槽内 呈倒放的v字形状,翅中与翅根之间的骨关节27位于v字形状的顶 点,当翅中与翅根之间的骨关节的骨缝到达正对刀具组件4的上切割 刀25刀刃时,由上切割刀25对准翅中与翅根之间的骨关节27进行 切割,将翅根从鸡翅上切割;
68.s5:当翅中与翅根的骨关节被切割完成后,将翅根切下,剩余的 翅中与翅尖继续在旋转体的第一定位槽、第二定位槽内旋转,通过切 割定位板和导向压力板12对鸡翅的翅中与翅尖之间的骨关节28定 位,翅中与翅尖在旋转体上呈现正立的v字形状,翅中与翅尖之间 的骨关节28在v字形状的最低点,当翅中与翅尖之间的骨关节的骨 缝所在的位置正对刀具组件4的下切割刀26的刀刃时,由下切割刀 26对鸡翅的翅中与翅尖的骨关节进行切割。
69.上述依据本发明的理想实施例为启示,通过上述的说明内容,相 关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样 的变更以及修改。本项发明的技术性范围并不局限于说明书上的内 容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。