1.本发明涉及一种贻贝单绳养殖模式的机械化采收装备,属于贻贝采收技术领域。
背景技术:
2.现有的单绳养殖模式的贻贝采收,存在以下问题:养殖绠绳较难实现连续顺利起放,起捕贻贝效率低;养殖绳与梗绳分离时需要采用人工的方式或者额外的切割装置,自动化程度较低;由于养殖绳上的贻贝分布不均,采用机械装置进行贻贝从养殖绳上脱离的工序的难度较大,经常发生养殖绳卡主的现象;与贻贝分离后的养殖绳的收集整理不整齐,有的发生缠绕,导致下次使用的难度加大。
技术实现要素:
3.本发明的目的是提供一种贻贝单绳养殖模式的机械化采收方法及装备,采用起捕装置的内外动力轮内侧均布有中心发散式的条状不锈钢条,且内外错开分布的设计,实现养殖绠绳的无打滑连续起放;特殊设计的外动力轮内侧带有刃口的前侧起捕装置,实现对于养殖绳的自动切断;贻贝分离系统采用两步分离的方式,避免贻贝分离时的卡死现象;采用xy方向均匀布置的养殖绳收集系统,养殖绳收集更为整齐,避免缠绕,同时节约存储空间。
4.本发明采取以下技术方案:
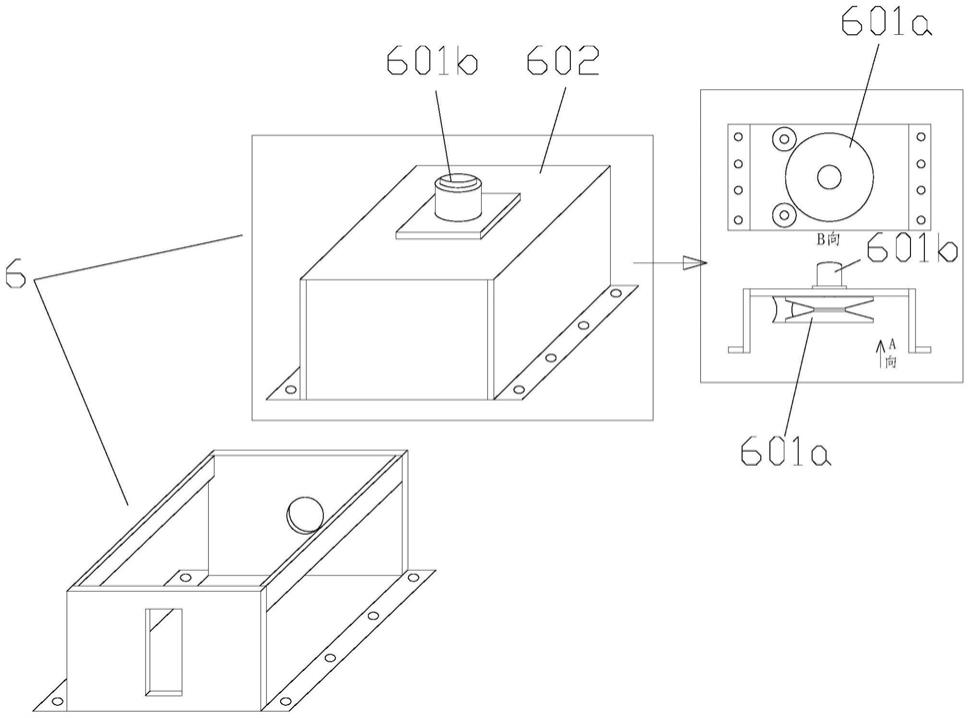
5.一种贻贝单绳式养殖模式的机械化采收装备,包括依次设置的前起捕装置4、z型输送机8、后起捕装置10和养殖绳收集系统12;所述前起捕装置4、z型输送机8、后起捕装置10依次设于舷侧,所述养殖绳收集系统12设于船体平台;所述前起捕装置4包括同轴固定内动力轮402和外动力轮401,所述内动力轮402和外动力轮401之间具有一用于夹持梗绳3的v形槽,所述外动力轮401四周等角度布置多个呈优弧状的用于切断养殖绳的带刃口的槽口401a;所述z型输送机8上固定设置一贻贝分离系统6,所述贻贝分离系统6包括依次设置的前置分离装置601与后置动力装置602,所述前置分离装置601包括一盒体,盒体的前端面设置一口径较大的矩形孔,后端面设置一口径较小的圆孔,所述矩形孔及圆孔的口径均大于脱除贻贝后的梗绳3的外径;所述后置动力装置602包括一贻贝分离导轮601a,及同轴驱动所述贻贝分离导轮601a的贻贝分离马达601b;养殖绳穿过所述前置分离装置601的矩形孔和圆孔后,在所述贻贝分离导轮601a的导向及所述贻贝分离马达601b的驱动下向后移动;所述后起捕装置10包括将梗绳向后导向的内动力轮402、外动力轮401;所述养殖绳收集系统12包括一矩形支架1201,所述矩形支架1201上设置一x向导轨及与x向导轨垂直并可沿x向导轨移动的y向导轨,所述y向导轨上设置一可延其直线运动的养殖绳释放装置1202,所述养殖绳释放装置1202具有一养殖绳释放导轮1202a和与其同轴连接的养殖绳释放马达1202b。
6.优选的,所述前起捕装置的外动力轮401形状为圆台体,在内侧面均布有中心发散式的条状不锈钢条,所述槽口401a设于相邻两个条状不锈钢条之间;所述后起捕装置的内
动力轮402形状为圆台体,在内侧面均布有与外动力轮401相同的中心发散式的条状不锈钢条,同时安装时内动力轮与外动力轮的内侧面的条状不锈钢条错开,保证养殖绠绳在嵌入两轮中间后成s形状,增加其牵引摩擦力。
7.优选的,所述前起捕装置4、后起捕装置10各自设置于一起吊架11上,所述起吊架包括立柱、悬臂、起吊系统;其中,立柱为方形管状,底端通过螺栓链接在可回转的底座上,回转底座通过螺栓连接在船体的上;在回转底座上每隔15
°
~30
°
设有锁定机构,确保起吊架在一定的位置保持回转锁定;立柱的高度在1.5m~3m之间;悬臂由方型的固定段及伸缩段组成,固定段用于起捕动力装置的安装,且在其底端设有不同位置的悬挂孔;固定段的一端通过焊接方型管的方式套入立柱中,并保证与立柱有间隙配合;伸缩段通过侧面的液压缸的移动实现伸缩段的伸缩长度的控制,保证对不同贻贝养殖的参数的起吊要求;起吊系统包括缠绕轮、液压马达、定滑轮及带有吊钩的吊绳,缠绕轮于液压马达通过支架固定在立柱顶端,缠绕轮与液压马达通过键轴连接,通过马达带动缠绕轮正反转动;定滑轮固定在悬臂伸缩段的前端,吊绳经定滑轮连接在缠绕轮上,通过缠绕轮的正反转动,实现吊绳的收放,从而实现对养殖绠绳的起吊。
8.优选的,所述z型输送机z型输送机的下端拐点与前起捕装置中心在同一垂直线上。
9.优选的,输送带的两侧板需高于输送带上平面200~350mm,所述两侧板采用带孔结构。
10.进一步的,输送带采用链轮驱动形式的不锈钢输送带,输送带网孔较长方向的尺寸为贻贝最小面尺寸的50%~70%。
11.进一步的,所述前置分离装置601的盒体的前端面的矩形孔宽度方向尺寸为养殖绳外圆直径的1.2~1.6倍,高度方向为养殖绳外圆直径的3~5倍;所述圆孔直径为养殖绳外缘直径的1.1~1.3倍;前端面与后端面的距离为250~500mm,同时其底侧连接板上开孔用于与z型输送机的侧板固定,宽度与输送机的两侧挡板宽度一致。
12.更进一步的,所述后端面的背侧装上的左右两个方向装两个清洗喷头,用于清洗养殖绳上的附着物,喷头可调整方向。
13.更进一步的,所述贻贝分离导轮601a侧旁设有两个其导向作用的压轮。
14.优选的,养殖绳收集系统12还包括设于矩形支架1201下方的养殖绳收集容器13。
15.优选的,所述贻贝分离导轮601a的侧旁设置一对贻贝分离压轮,所述一对贻贝分离压轮相对于贻贝分离导轮601a中心的夹角为90
°
,使所述养殖绳与贻贝分离导轮601a的接触面达到整个圆周中270
°
的范围,实现有效牵引。
16.优选的,所述养殖绳释放导轮1202a的侧旁设置一对养殖绳释放压轮,所述一对养殖绳释放压轮相对于养殖绳释放导轮1202a中心的夹角为90
°
,使所述养殖绳与养殖绳释放导轮1202a的接触面达到整个圆周中270
°
的范围,实现有效牵引。
17.本发明的有益效果在于:
18.1)采用特殊设计的外动力轮内侧带有刃口的前侧起捕装置,实现对于养殖绳的自动切断,设计巧妙,提升自动化程度;
19.2)贻贝分离系统采用两步分离的方式,避免了贻贝分离时的卡死现象;
20.3)采用xy方向均匀布置的养殖绳收集系统,养殖绳收集更为整齐,避免缠绕,同时
节约存储空间;
21.4)前起捕装置、后起捕装置的内动力轮、外动力轮均设计为圆台体,在内侧面均布有中心发散式的条状不锈钢条,同时安装时内动力轮与外动力轮的内侧面的条状不锈钢条错开,保证养殖绠绳在嵌入两轮中间后成s形状,增加其牵引摩擦力,实现了养殖绠绳的无打滑连续起放。
附图说明
22.图1是贻贝分离系统的示意图。
23.图2是养殖收集系统的示意图。
24.图3是海中的贻贝养殖状态示意图。
25.图4是前起捕装置的示意图。
26.图5是后起捕装置的示意图。
27.图6是起吊架的示意图。
28.图7是z型输送机及其上的贻贝分离系统的示意图。
29.图8是本发明贻贝单绳式养殖模式的机械化采收装备的主视图。
30.图9是本发明贻贝单绳式养殖模式的机械化采收装备的俯视图。
31.图10是图8的局部放大图。
32.图中,1.养殖绳(附着贻贝),2.浮球,3.梗绳,4.z型输送机,5.前吊架,6.贻贝分离系统,7.养殖绳(去除贻贝),8.z型输送机,9.后续加工系统,10.后起捕装置,11.后吊架,12.养殖绳收集系统,13.养殖绳收集容器;
33.601.前置分离装置,601a.贻贝分离导轮,602.后置动力装置,602a.贻贝分离导轮,602b.贻贝分离马达,1201.矩形支架,1202.养殖绳释放装置,1202a.养殖绳释放导轮,1202b.养殖绳释放马达,401.外动力轮,401a.槽口,402.内动力轮,1001.外动力轮(后起捕装置的),1002.内动力轮(后起捕装置的)。
具体实施方式
34.下面结合附图和具体实施例对本发明进一步说明。
35.本实施例具体为一种贻贝单绳式养殖模式的机械化装备,其主要有前起吊架、前起捕装置、z型输送机、贻贝分离系统、养殖绳收集系统、后起吊架及后、后起捕动力系统组成,形成了贻贝单绳式养殖模式的机械化采收装备技术,大大减轻了生产过程的人员劳动力,提升了作业效率。
36.其主要工艺流程为前后起吊、挂耕绳、调整高度、连续起捕、养殖绳与绠绳分离、贻贝分离、贻贝输送、养殖绳收集。
37.参见图4,前起捕装置4由液压马达、支架、内动力轮和外动力轮组成。其中外动力轮形状为圆台体,在侧面均布有条状不锈钢条;进一步,在每两个不锈钢条中间的侧面有均布有优弧状的槽口,槽口一般为65%~85%个圆,同时槽口上侧破口距离l在0.95倍绠绳直径于1.05倍养殖绳挂绳直径,从而保证在起捕过程中养殖绳的挂绳进入圆孔,但养殖绠绳不会被转入圆孔;更进一步,其槽口的底端设计有刃口,在养殖绳的挂绳进入圆孔后随着旋转、重力的作用被切断,脱离养殖绠绳。其中内动力轮形状为圆台体,在侧面均布有条状不
锈钢条,均布的钢条数量和大小与外动力轮的一致,同时安装时保证内动力轮与外动力轮的侧面不锈钢条错开,保证养殖绠绳在嵌入两轮中间后成s形状,增加其牵引摩擦力。液压马达通过螺栓固定在支架上,并通过键轴与内外动力轮连接,组成前起捕动力装置。
38.参见图5,后起捕装置10由液压马达、支架、内动力轮和外动力轮组成。其中外动力轮形状为圆台体,在侧面均布有条状不锈钢条;其中内动力轮形状为圆台体,在侧面均布有条状不锈钢条,均布的钢条数量和大小与外动力轮的一致,同时安装时保证内动力轮与外动力轮的侧面不锈钢条错开,保证养殖绠绳在嵌入两轮中间后成s形状,增加其牵引摩擦力。液压马达通过螺栓固定在支架上,并通过键轴与内外动力轮连接,组成前起捕动力装置。支架上端设有悬挂孔,用于固定于起吊装置上。
39.参见图6,起吊架11由立柱、悬臂、起吊系统组成。其中立柱为方形管状,底端通过螺栓链接在可回转的底座上,回转底座通过螺栓连接在船体的上。为减少船载构建,回转底座的驱动采用人力推动,同时在回转底座上每隔15
°
~30
°
设计有锁定机构,确保起吊架在一定的位置保持回转锁定。立柱的高度一般在1.5m~3m之间。悬臂由方型的固定段及伸缩段组成,固定段主要用于是起捕动力装置的安装,且在底端设计有不同位置的悬挂孔适应养殖参数差异的要求,同时固定段的一端通过焊接有方型管的方式,套入立柱中,并保证与立柱有一定的间隙配合,能实现上下移动。悬臂的上下移动通过在立柱的一侧设计有丝杆螺母结构来实现,通过顶端的液压马达的驱动带动丝杆的正反旋转,从而带动丝杠上的螺母上下运动,再带动与之连接的悬臂方型管,使得悬臂能实现上下的移动,从而满足不同深度养殖方式的贻贝起捕。伸缩段通过侧面的液压缸的移动实现伸缩段的伸缩长度的控制,保证对不同贻贝养殖的参数的起吊要求。起吊系统由缠绕轮、液压马达、定滑轮及带有吊钩的吊绳。缠绕轮于液压马达通过支架固定在立柱顶端,缠绕轮与液压马达通过键轴连接,通过马达带动缠绕轮正反转动;定滑轮固定在悬臂伸缩段的前端,吊绳经定滑轮连接在缠绕轮上,通过缠绕轮的正反转动,实现吊绳的收放,从而实现对养殖绠绳的起吊。起吊架有前后两个,前起吊机架带有前起捕动力装置,后起吊机架带有后起捕动力装置,
40.通过两个起吊架配合实现养殖绠绳的起吊及放入海中,输送机在前后起吊架的中间,同时保证对养殖绠绳的吊起一定高度后,为脱离的贻贝养殖绳高于z型输送机的底端水平面,从而保证经过前起捕动力装置后,贻贝养殖绳均落入输送机上。再通过安装在z型输送机上的养殖绳与贻贝的分离系统,实现贻贝与养殖绳的脱离,之后贻贝通过输送机送至后续的加工系统。养殖绳通过养殖绳收集系统完成养殖绳的有序收集,便于重复利用。
41.参见图7,贻贝提升采用z型输送机。同时为保证养殖绳与绠绳分离后掉落在z型输送机上,z型输送机的下端拐点与前起捕装置中心在同一垂直线上。
42.为保证从养殖绳上分离的贻贝不从输送机两侧滑落掉至海域中,输送带两侧板需高于输送带上平面200~350mm,同时为减轻其在水中的阻力及其本身的重量,两侧板采用带孔结构。
43.为防止在海上复杂环境中输送网带的跑偏影响使用,输送带采用链轮驱动形式的不锈钢输送带,同时为保证输送带的透水性其输送带网孔较长方向的尺寸的因为贻贝最小面(长宽高)尺寸的50%~70%。同时为保证分离后的贻贝不在输送带上滑落,输送机网带每隔250~500mm的具体设计有挡板,挡板为带孔的板、或者栏栅,其高度一般为低于输送机低侧的挡板50~100mm,宽度与网带同宽。
44.参见图1,贻贝分离系统6是指把贻贝从养殖绳上分离的设备,主要有分离装置、动力装置、支架和养殖绳收集装置和构成。其中为提高分离效果,分离装置有前后两块开孔的板连接在一起组成,其中前侧的1号分离板用厚度不小于5mm不锈钢板在中间开长方形的孔,宽度方向尺寸为养殖绳外圆直径的1.2~1.6倍,高度方向为养殖绳外圆直径的3~5倍;后侧2号分离板用一定厚度不锈钢板在中间开圆孔,直径为养殖外圆直径的1.1~1.3倍;两块板之间的通过筋板连接成一个整体,两板的前后距离为250~500mm,同时底侧连接板上开孔用于与z型输送机的侧板固定,宽度与输送机的两侧挡板宽度一致。
45.继续参见图1,其中动力装置主要有动力轮和两个压轮组成,动力轮由液压马达和转轮组成,液压马达固定在支架上,转轮连接在液压马达的轴上。其中转轮由两片锥形圆盘组成,为保护养殖绳增加其重复利用的次数,圆盘的内侧的锥面附着一定厚度的橡胶,同时为增加摩檫力,橡胶面做成带有凹凸状的结构。进一步为增加动力轮的牵引养殖绳牵引力,在动力轮的一侧增加两压轮,两个压轮为无动力轮,通过中心轴固定在支架上,可实现灵活转动。
46.同时进一步为保证养殖绳的清洁度,在后方压轮的图示处装两个清洗喷头,用于进一步清洗养殖绳上的附着物,喷头可调整方向。
47.结合图10,整个支架底侧连接板上开孔用于与z型输送机的侧板固定,宽度与输送机的两侧挡板宽度一致。
48.参见图2,养殖绳收集系统12采用可实现二维运动的机构组成,其主要有横向(x向)移动机构,纵向(y向)移动机构、养殖绳牵引机构及支架组成。其中y向移动机构主要由动力电机、滚珠丝杆、丝杆螺母、线性导轨、导轨滑块等组成。丝杆螺母和导轨滑块通过金属板连接起来,形成能同时沿着y向运动“移动托架”。滚珠丝杠得两端通过带轴承得轴承座固定下支架上,丝杆的一端装有动力电机,动力电机采用步进电机或伺服电机,通过电机正反转动促使“移动托架”沿着y向前后移动,同时因为采用步进电机或伺服电机,移动距离可控。
49.其中x向移动机构主要由动力电机、滚珠丝杆、丝杆螺母、线性导轨、导轨滑块等组成。滚珠丝杆两端通过带轴承的轴承座固定与“移动托架”上,一端同样装有动力电机采用步进电机或伺服电机,线性导轨同样固定在“移动托架”上,导轨上的移动滑块与丝杆螺母连接组成“移动平台”,通过电机的正反转动使得移动平台沿着x向前后移动。
50.继续参见图2,其中养殖绳牵引机构主要有动力轮、两个压轮及支架组成,动力轮由液压马达和转轮组成,液压马达固定在支架上,转轮连接在液压马达的轴上。其中转轮由两片锥形圆盘组成,为保护养殖绳增加其重复利用的次数,圆盘的内侧的锥面附着一定厚度的橡胶,进一步为增加动力轮的牵引养殖绳牵引力,在动力轮的一侧增加两压轮,两个压轮为无动力轮,通过中心轴固定在支架上,可实现灵活转动。整个机构安装在支架上,支架的长宽高一般为养殖绳收集容器的长宽高的1.1~1.3倍。
51.养殖绳收集系统12的工作原理为养殖绳通过牵引机构的一个压轮内侧,动力轮及另一个压轮内侧后,在重力作用下往下落。由于动力轮不停的转动,不断的对养殖绳进行收集使其不断的落入养殖绳收集容器内直至完成。其中动力轮旋转的线速度与“养殖绳与贻贝的分离系统”中动力轮的速度保持一致且保持联动。同时在收集过程中收集系统的动力轮线速度与横向(x向)移动机构的移动速度一致,同时纵向(y向)移动机构每移动养殖绳直
径的一个距离,x方向的移动从一端移动到另一端,等到x方向移动到另一端时,y方向再向前推进一个养殖绳直径的一个距离,待y移动到末端时再逐步返回到前端。x,y向移动的距离与养殖绳收集容器的长宽相等。如此往复,把收集的养殖绳一层层平正有序的堆放在养殖绳收集容器便于下次使用。
52.对于养殖绳收集系统12,具体来说,有y向导轨及y向的丝杆,通过丝杆运动实现y向导轨上的滑块沿y轴来回运动;x向的安装有导轨及x向的丝杆,同时通过丝杆运动带动x向导轨上的滑块沿着x向来回运动,同时x向导轨及丝杆安装于y向的滑块上,通过y向的移动带动整个x向上的机构沿着y向来回移动。
53.上述采收系统中所有的液压马达均由液压泵站集中提供动力源。系统中配有太阳能电池板及蓄电池,用于系统中的控制的供电。同时为方便船载人员在不同位置的控制及较少控制元器件在海上的暴露,增加其使用年限,所有的液压控制系统均在集中的控制箱中完成,同时现场的控制均采用无线通信完成(即操作人员可以在船上任何位置,拿着遥控开关,完成各设备的操作)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

