1.本发明属于农业机械技术领域,具体地说,涉及一种适用于丘陵山地的三七播种机器人。
背景技术:
2.目前,我国的三七播种都是使用自动化程度较低的机械,需要人工操作机械才能完成播种,且播种效率较低,费时费力。所以大部分三七的种植都是通过人力的方式来种植,这种方式不仅劳动强度大,而且很容易造成株距行距不规范、播种深度不统一的问题,这样的影响就是播种效率低、质量差,严重影响出苗率和产量。国内现有的三七播种机在播种时存在严重的重播、漏播现象,从而导致了这些播种机适用的农艺范围有了很大局限。随着我国人口老龄化的到来,农村劳动人口的流失,我们迫切需要能够代替人类播种且播种效率高、播种质量好的机器。
技术实现要素:
3.针对背景技术中存在的问题,本发明提出了一种适用于丘陵山地三七播种机器人,实现三七的机械化播种,大大降低劳动强度,而且能获得路径规划,自主行走,自动播种,每次精确播种一粒,实现精准农业。另外,本发明结构紧凑合理,实用性强,可以实现全自动播种,能够很好的与作业环境相适应。
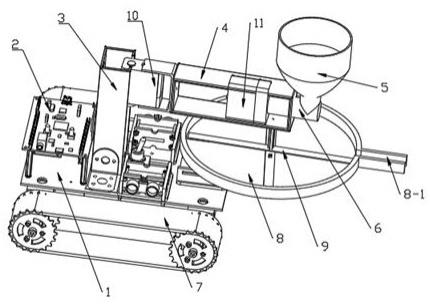
4.为实现上述目的,本发明采用如下技术方案:一种适用于丘陵山地的三七播种机器人包括机架1、导航装置2、支柱3、摆杆4、储种器5、排种器6、履带行走装置7、播种盘8、搅种器9、舵机ⅰ10、舵机ⅱ11,所述的机架1的底部安装有履带行走装置7,机架1上安装有导航装置2,支柱3固定安装在机架1的顶部,支柱3的顶部安装有能够带动摆杆4左右摆动的舵机ⅰ10,摆杆4上安装有能够带动排种器6及储种器5沿摆杆4做轴向运动的舵机ⅱ11,排种器6的进种口与储种器5的出种口连接,播种盘8固定安装在摆杆4的前端下方,播种盘8内设置有能够搅动其内种子并使种子顺畅的从排种口8
‑
1排出的搅种器9。
5.进一步,所述的导航装置2包括导航模块2
‑
1、stm32电路板2
‑
2、超声波模块2
‑
3,所述的stm32电路板2
‑
2固定安装在机架1上,机架1的左右两侧分别安装有超声波模块2
‑
3,两个超声波模块2
‑
3分别与stm32电路板2
‑
2连接,stm32电路板2
‑
2与导航模块2
‑
1连接,stm32电路板2
‑
2与履带行走装置7的电机7
‑
1连接,stm32电路板2
‑
2与履带行走装置7的驱动电机连接。
6.进一步,所述的搅种器9的搅拌叶为一个十字结构,搅种器9的搅拌电机固定安装在播种盘8的底部,十字结构的交叉处固定有一根与搅拌电机动力输出端连接的转轴,该转轴通过轴承安装在播种盘8中部的通孔上。
7.进一步,所述的排种口8
‑
1的孔径大于所播三七种子的直径,但小于两粒三七种子的直径之和。
8.本发明的有益效果:本发明采用机械化播种,大大降低劳动强度,提高了作业效率,同时,本技术每次播种为一粒种子,避免出现重播漏播的情况,实现了精准播种;另外,本发明结构简单可靠、实用性强、制造方便,易于推广实用,可以很好的与温室大棚内的作业环境相适应。
附图说明
9.图1为本发明的结构示意图;图2为本发明的导航装置结构示意图;图3
‑
5为本发明导航模块的电路结构示意图;图6为本发明超声波模块的电路结构示意图;图7为本发明stm32电路板的电路结构示意图。
具体实施方式
10.为了使本发明的目的、技术方案和有益效果更加清楚,下面将结合附图,对本发明的优选实施例进行详细的说明,以方便技术人员理解。
11.如图1
‑
2所示,一种适用于丘陵山地的三七播种机器人包括机架1、导航装置2、支柱3、摆杆4、储种器5、排种器6、履带行走装置7、播种盘8、搅种器9、舵机ⅰ10、舵机ⅱ11。
12.所述的机架1的底部安装有履带行走装置7,履带行走装置7便于在丘陵山地行走。
13.机架1上安装有导航装置2,所述的导航装置2包括导航模块2
‑
1、stm32电路板2
‑
2、超声波模块2
‑
3,所述的stm32电路板2
‑
2固定安装在机架1上,机架1的左右两侧分别安装有超声波模块2
‑
3,两个超声波模块2
‑
3分别与stm32电路板2
‑
2连接,stm32电路板2
‑
2与导航模块2
‑
1连接,stm32电路板2
‑
2与履带行走装置7的电机7
‑
1连接,stm32电路板2
‑
2与履带行走装置7的驱动电机连接。在三七播种机器人前进过程中,超声波模块2
‑
3实现避障功能,并由导航模块2
‑
1工作,控制履带行走装置7的行走与转向,完成三七播种机器人的行走、转向与避障。
14.支柱3固定安装在机架1的顶部,支柱3的顶部安装有能够带动摆杆4左右摆动的舵机ⅰ10,摆杆4上安装有能够带动排种器6及储种器5沿摆杆4做轴向运动的舵机ⅱ11,排种器6的进种口与储种器5的出种口连接,播种盘8固定安装在摆杆4的前端下方,通过舵机ⅰ10带动摆杆4左右摆动,由舵机ⅱ11带动带动排种器6及储种器5沿摆杆4前后移动,实现对排种器6种子排出位置的调整,同时,在舵机ⅰ10带动摆杆4左右带动的过程中,能够将种子从排种器6的出种口将种子甩落到播种盘8内。播种盘8内设置有能够搅动其内种子并使种子顺畅的从排种口8
‑
1排出的搅种器9。当种子落入到播种盘8内后,搅种器9转动,将种子扒到排种口8
‑
1内,种子进入到排种口8
‑
1内后,在种子之间的相互排挤作用下落到田间。由于所述的排种口8
‑
1的孔径大于所播三七种子的直径,但小于两粒三七种子的直径之和,这样排种口8
‑
1内横向方向只能容纳一粒种子,这样能够保证种子在排种口8
‑
1内沿其长度方向一排排列,不会出现横向上有两粒种子的排列,从而保证每次播种只播出一粒种子,避免出现重播的情况。
15.所述的搅种器9的搅拌叶为一个十字结构,搅种器9的搅拌电机固定安装在播种盘8的底部,十字结构的交叉处固定有一根与搅拌电机动力输出端连接的转轴,该转轴通过轴
承安装在播种盘8中部的通孔上,通过搅拌电机带动十字结构的搅拌叶转动,到十字结构的搅拌叶的每个端部转动到排种口8
‑
1位置处时,就会有一粒种子进入到排种口8
‑
1内,同时挤落一粒种子播到田间,这样进而实现播种间距的调整,同时也避免种子漏播的情况。
16.本发明的工作过程:履带行走装置7带动整个三七播种机器人在丘陵土地上行走,在行走过程中,超声波模块2
‑
3实现避障功能,并由导航模块2
‑
1工作,控制履带行走装置7的行走与转向,完成三七播种机器人的行走、转向与避障。通过舵机ⅰ10带动摆杆4左右摆动,由舵机ⅱ11带动带动排种器6及储种器5沿摆杆4前后启动,实现对排种器6种子排出位置的调整,同时,在舵机ⅰ10带动摆杆4左右带动的过程中,能够将种子从排种器6的出种口将种子甩落到播种盘8内,通过搅拌电机带动十字结构的搅拌叶转动,到十字结构的搅拌叶的每个端部转动到排种口8
‑
1位置处时,就会有一粒种子进入到排种口8
‑
1内,同时挤落一粒种子播到土壤中,这样实现播种间距的调整,同时也避免种子出现重播和漏播的情况。
17.最后说明的是,以上优选实施例仅用以说明本发明的技术方案而非限制,尽管通过上述优选实施例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本发明权利要求书所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

