1.本发明属于农业机械技术领域,特别涉及一种甘蔗收割机刀盘仿形切割平台。
背景技术:
2.在中国,甘蔗是制糖业的重要原料。甘蔗种植面积占中国糖料种植面积的85%。在巴西等国,甘蔗也是生物乙醇和生物质发电的重要原料,甘蔗产量已成为国家调控能源比重的重要因素。在中国,甘蔗主要种植在广西、广东、云南等南部热带地区,这些地区都是参差不齐的甘蔗田。在收割过程中,机手只能手动调节刀盘的高度。如果刀盘设置太高,甘蔗损失和破头会增加。反之,刀盘设置过低,会使甘蔗根部受损,影响明年的发芽。因此,甘蔗收割机刀盘高度的自动控制是机械式甘蔗收获机的关键因素。
3.由于田间复杂的作业环境,刀盘高度的控制在国内仍是人工控制,机手无法保证所需的刀盘高度。因此,开发一款能够自动调节刀盘高度的控制系统是提高收割效率的有效方法。
4.目前刀盘高度的测量方法可分为直接测量和间接测量。直接测量法主要包括超声波传感器、机器视觉和电磁感应。山姆等人研究了一种基于电磁感应法测量刀盘高度的方法,但该方法的检测精度容易受到田间甘蔗和杂草的遮挡影响。he使用图像方法来识别刀盘的高度,由于在收割过程中,普遍存在灰尘,使检测误差较大。间接测量方法包括机械接触的方法和液压传感方法。萨格斯等人发现可以通过收集刀盘液压马达的压力来判断切入土壤的深度。白等人研究了一种基于液压马达压力的刀盘高度自动控制系统,该系统最大误差为0.8cm,最小切割深度为2.6cm。
5.在本发明中,开发了基于地轮的切割平台来进行刀盘高度的控制,并创新设计了一种方法来评估刀盘高度控制系统的性能。本发明可为今后甘蔗收割机刀盘高度的设计开发提供一定的参考。
技术实现要素:
6.针对目前甘蔗收割机手动调节刀盘高度,导致甘蔗收割损失大、破头率高的问题。本发明提出一种基于甘蔗收割机刀盘仿形切割平台,该平台采用角度传感器测量仿形轮与仿形杆的相对角度,控制器经过刀盘高度数学模型计算刀盘的实际高度,进而控制电磁换向阀的开合,从而控制液压缸的伸缩,以此来达到刀盘高度实时控制的目的。
7.为达到以上目的,本发明采取的技术方案是:
8.一种甘蔗收割机刀盘仿形切割平台,包括:刀盘升降系统、刀盘驱动系统、刀盘高度自动调节控制系统和机架15;
9.所述刀盘升降系统设置在机架15前端的两个纵梁上;所述刀盘驱动系统设置在机架15的底部横梁上,位于机架15的后端;所述刀盘高度自动调节控制系统设置在机架15斜置的右横梁上。
10.在上述方案的基础上,所述刀盘升降系统包括:刀盘切割架3、两个直线滑轨2、仿
形杆7、仿形轮8、刀盘轴9、刀盘10、直角转向器4和弹性联轴器5;
11.所述两个直线滑轨2分别设置在机架15前端的两个纵梁上,所述刀盘切割架3的两端分别设置在两个直线滑轨2上;
12.所述仿形杆7的一端设置在刀盘切割架3的左端下部,所述仿形轮8设置在仿形杆7的另一端,所述仿形轮8与地面接触,在作业前进过程中,仿形轮8会随着地面的高低起伏上下运动,进而会使仿形杆7产生一定角度的摆动;
13.所述直角转向器4固定在刀盘切割架3的中部,通过弹性联轴器5与刀盘轴9连接,刀盘轴9通过两个轴承固定在刀盘切割架3上,所述刀盘10设置在刀盘轴9上。
14.在上述方案的基础上,所述刀盘驱动系统包括:调速电机13和联轴器14;
15.所述调速电机13通过联轴器14与直角转向器4连接,调速电机13通过联轴器14带动直角转向器4转动,直角转向器4用于将水平旋转运动转换为竖直旋转运动,进而实现刀盘10的调速旋转运动。
16.在上述方案的基础上,所述刀盘高度自动调节控制系统包括:液压缸1、控制器、角度传感器6、电磁换向阀、左继电器、右继电器、触摸屏和拉绳传感器;
17.所述控制器分别与触摸屏、角度传感器6、拉绳传感器、左继电器和右继电器连接,左继电器和右继电器均与电磁换向阀连接,电磁换向阀与液压缸1连接;
18.所述液压缸1的一端设置在机架15前端的上横梁上,另一端与刀盘切割架3的上端采用螺栓铰接,液压缸1的伸缩带动刀盘切割架3做竖直升降运动,从而实现刀盘高度的调节;
19.所述拉绳传感器设置在液压缸1上,用于测量液压缸1的伸缩长度,并将液压缸1的伸缩长度发送给控制器;
20.所述角度传感器6设置在仿形杆7的一端,用于采集仿形杆7摆动的角度信息,并将采集的角度信息发送给控制器;
21.所述触摸屏与控制器采用rs485进行通讯,用于手动设置刀盘高度范围、显示刀盘实时高度和显示液压缸的伸缩长度;
22.所述控制器根据手动设置的刀盘高度范围建立刀盘高度数学模型,通过角度传感器6发送的角度信息和刀盘高度数学模型计算刀盘的实际高度,若刀盘的实际高度>刀盘高度范围的上限,则触发右继电器,液压缸1缩进,刀盘下降,若刀盘的实际高度<刀盘高度范围的下限,则触发左继电器,液压缸1伸开,刀盘上升,若刀盘高度范围的下限≤刀盘的实际高度≤刀盘高度范围的上限,则刀盘不动。
23.在上述方案的基础上,所述控制器为西门子s7
‑
200控制器。
24.在上述方案的基础上,所述机架15的右后端设有土槽车连接点12,土槽车连接点12用于连接土槽车,土槽车用于为整个平台提供24v的电源。
25.在上述方案的基础上,所述机架15的四角处均设有车轮11,车轮11用于支撑和移动所述平台。
26.本发明的有益技术效果如下:
27.本发明利用液压缸自动调节刀盘高度替代人工手动调节,极大地提高刀盘高度的准确性,有利于降低收割损失和甘蔗破头。
28.本发明结构简单,制造成本低廉,便于维修维护,实用性较强。
附图说明
29.本发明有如下附图:
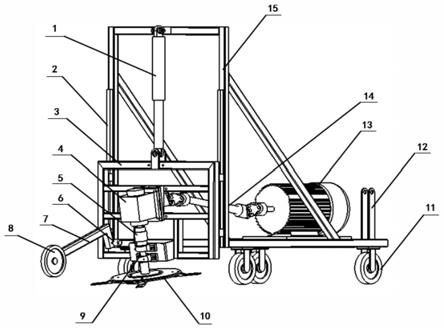
30.图1甘蔗收割机刀盘仿形切割平台结构示意图。
31.图2刀盘高度自动调节控制系统框图。
32.图3刀盘高度自动调节控制系统的流程图。
33.图中:1.液压缸;2.直线滑轨;3.刀盘切割架;4.直角转向器;5.弹性联轴器;6.角度传感器;7.仿形杆;8.仿形轮;9.刀盘轴;10.刀盘;11.车轮;12.土槽车连接点;13.调速电机;14.联轴器;15.机架。
具体实施方式
34.以下结合附图1
‑
3对本发明作进一步详细说明。
35.如图1所示,该甘蔗收割机刀盘仿形切割平台主要分为刀盘升降系统、刀盘驱动系统、刀盘高度自动调节控制系统和机架15;
36.所述刀盘升降系统设置在机架15前端的两个纵梁上;所述刀盘驱动系统设置在机架15的底部横梁上,位于机架15的后端;所述刀盘高度自动调节控制系统设置在机架15斜置的右横梁上。
37.所述刀盘升降系统包括:刀盘切割架3、两个直线滑轨2、仿形杆7、仿形轮8、刀盘轴9、刀盘10、直角转向器4和弹性联轴器5;
38.所述两个直线滑轨2分别设置在机架15前端的两个纵梁上,所述刀盘切割架3的两端分别设置在两个直线滑轨2上;
39.所述仿形杆7的一端设置在刀盘切割架3的左端下部,所述仿形轮8设置在仿形杆7的另一端,所述仿形轮8与地面接触,在作业前进过程中,仿形轮8会随着地面的高低起伏上下运动,进而会使仿形杆7产生一定角度的摆动;
40.所述直角转向器4固定在刀盘切割架3的中部,通过弹性联轴器5与刀盘轴9连接,刀盘轴9通过两个轴承固定在刀盘切割架3上,所述刀盘10设置在刀盘轴9上。
41.所述刀盘驱动系统包括:调速电机13和联轴器14;
42.所述调速电机13通过联轴器14与直角转向器4连接,调速电机13通过联轴器14带动直角转向器4转动,直角转向器4用于将水平旋转运动转换为竖直旋转运动,进而实现刀盘10的调速旋转运动。
43.所述刀盘高度自动调节控制系统包括:液压缸1、控制器、角度传感器6、电磁换向阀、左继电器、右继电器、触摸屏和拉绳传感器;
44.如图2所示,所述控制器分别与触摸屏、角度传感器6、拉绳传感器、左继电器和右继电器连接,左继电器和右继电器均与电磁换向阀连接,电磁换向阀与液压缸1连接;
45.所述液压缸1的一端设置在机架15前端的上横梁上,另一端与刀盘切割架3的上端采用螺栓铰接,液压缸1的伸缩带动刀盘切割架3做竖直升降运动,从而实现刀盘高度的调节;
46.所述拉绳传感器设置在液压缸1上,用于测量液压缸1的伸缩长度,并将液压缸1的伸缩长度发送给控制器;
47.所述角度传感器6设置在仿形杆7的一端,用于采集仿形杆7摆动的角度信息,并将
采集的角度信息发送给控制器;
48.所述触摸屏与控制器采用rs485进行通讯,用于手动设置刀盘高度范围、显示刀盘实时高度和显示液压缸的伸缩长度;
49.如图3所示,所述控制器根据手动设置的刀盘高度范围建立刀盘高度数学模型,通过角度传感器6发送的角度信息和刀盘高度数学模型计算刀盘的实际高度,若刀盘的实际高度>刀盘高度范围的上限,则触发右继电器,液压缸1缩进,刀盘下降,若刀盘的实际高度<刀盘高度范围的下限,则触发左继电器,液压缸1伸开,刀盘上升,若刀盘高度范围的下限≤刀盘的实际高度≤刀盘高度范围的上限,则刀盘不动。
50.所述控制器为西门子s7
‑
200控制器。
51.所述机架15的右后端设有土槽车连接点12,土槽车连接点12用于连接土槽车,土槽车用于为整个平台提供24v的电源。
52.所述机架15的四角处均设有车轮11,车轮11用于支撑和移动所述平台。
53.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

