1.本发明涉及包装盒技术领域,更具体的说是一种包装盒及其加工方法。
背景技术:
2.正常包装盒在对食物进行包装后还需要带一双筷子,家用筷子非常不方便携带,而且家用筷子在携带后很容易弄脏,而且不容易进行存放,如果将筷子放在包装盒内部,筷子就会沾满食物,不易进行使用,而且通常在携带包装盒后只会携带一双筷子,携带筷子过多过于麻烦,若是在食用包装盒内食物过程中筷子被弄脏也不方便对筷子进行处理;该现有技术的缺点是不能将两个筷筒固定到包装盒上。
技术实现要素:
3.本发明的目的是提供一种包装盒及其加工方法,能将两个筷筒固定到包装盒上。
4.本发明的目的通过以下技术方案来实现:
5.一种包装盒加工方法,该方法包括以下步骤:
6.步骤一:对橡胶座进行钻孔;
7.步骤二:将橡胶座移动到筷筒处,在橡胶座移动过程转动排空橡胶座内碎屑;
8.步骤三:将筷筒固定,对筷筒进行钻孔,将筷筒和橡胶座组合;
9.步骤四;把胶水涂抹在筷筒上,将组合后筷筒和橡胶座固定在包装盒上。
10.一种包装盒加工装置,包括支撑板、丝杠、滑动杆、转动架和夹紧板,丝杠转动连接在支撑板上,两个滑动杆均滑动连接在支撑板上,丝杠和两个滑动杆之间螺纹传动,两个转动架分别转动连接在两个滑动杆上,多个夹紧板分别滑动连接在两个转动架上,多个夹紧板和两个转动架之间均设有弹簧。
11.一种包装盒加工装置包括推板、带槽推板和固定板,推板滑动连接在支撑板上,固定板固定连接在支撑板上,两个带槽推板均固定连接在推板上。
12.一种包装盒加工装置包括连接架、转动轴、转动杆、移动框、齿轮、齿条轨道、滑动板和夹紧杆,连接架固定连接在支撑板上,转动轴转动连接在连接架上,两个转动杆分别固定连接在转动轴的左右两端,两个移动框分别转动连接在两个转动杆上,多个齿轮分别固定连接在两个移动框上,多个齿轮分别和多个齿条轨道啮合传动,多个齿条轨道均固定连接在连接架上,齿条轨道呈圆弧形,且齿条轨道的几何中心位于转动轴圆心处,多个夹紧杆分别滑动连接在两个移动框上,多个夹紧杆和两个移动框之间均设有弹簧,滑动板滑动连接在移动框上,滑动板和移动框之间通过弹簧连接。
13.一种包装盒加工装置包括固定套、转动杆和滑轨,两个固定套分别滑动连接在两个滑轨上,两个滑轨均固定连接在支撑板上,多个转动杆分别转动连接在两个固定套上,多个转动杆分别转动连接在两个转动杆上。
14.一种包装盒加工装置包括钻孔器、滑块、丝杠ⅱ、移动座、丝杠ⅲ和钻孔器ⅱ,两个钻孔器分别固定连接在两个滑块上,两个滑块均和丝杠ⅱ螺纹传动,丝杠ⅱ转动连接在两
个移动座上,两个滑块分别滑动连接在两个移动座上,两个移动座分别和两个丝杠ⅲ螺纹传动,两个移动座均滑动连接在支撑板上,两个丝杠ⅲ均转动连接在支撑板,两个丝杠ⅲ之间通过皮带传动,钻孔器ⅱ固定在一个液压缸上,液压缸滑动在连接架上。
15.一种包装盒,一种包装盒上设有两个筷筒,两个筷筒上均固定有橡胶座,两个橡胶座上均设有夹紧孔。
16.本发明一种包装盒及其加工方法的有益效果为:
17.本发明一种包装盒及其加工方法,能够直接将筷子固定在包装盒上,能便于对筷子进行存放,将餐具和包装盒一体化,免去收容的麻烦,同时还能对筷子进行保护,能够自动将两个筷筒安装在包装盒上,还能对筷筒内部碎屑进行清理,在移动橡胶座的过程中能够直接将橡胶座内部碎屑倒出,能够自动将橡胶座和筷筒对应,便于将橡胶座和筷筒固定,在对筷筒进行加工过程中还能对筷筒进行加固,避免筷筒位置发生改变导致被损坏。
附图说明
18.下面结合附图和具体实施方法对本发明做进一步详细的说明。
19.图1是本发明的一种包装盒加工方法的流程图;
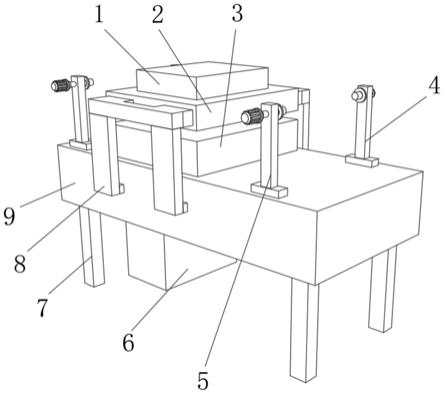
20.图2是本发明的一种包装盒概要图;
21.图3是本发明的一种包装盒概要图ⅱ;
22.图4是本发明的一种包装盒加工装置支撑板概要图;
23.图5是本发明的一种包装盒加工装置转动架概要图;
24.图6是本发明的一种包装盒加工装置推板概要图;
25.图7是本发明的一种包装盒加工装置移动框概要图;
26.图8是本发明的一种包装盒加工装置滑动板概要图;
27.图9是本发明的一种包装盒加工装置转动杆概要图;
28.图10是本发明的一种包装盒加工装置固定套概要图;
29.图11是本发明的一种包装盒加工装置滑块概要图;
30.图12是本发明的一种包装盒加工装置移动座概要图。
31.图中:
32.支撑板110;丝杠120;滑动杆130;转动架140;夹紧板150;推板210;带槽推板220;固定板230;连接架310;转动轴320;转动杆330;移动框340;齿轮350;齿条轨道360;滑动板370;夹紧杆380;固定套410;转动杆420;滑轨430;钻孔器510;滑块520;丝杠ⅱ530;移动座540;丝杠ⅲ550;钻孔器ⅱ560。
具体实施方式
33.下面结合附图对本发明作进一步详细说明。
34.如图1所示;
35.一种包装盒加工方法,该方法包括以下步骤:
36.步骤一:对橡胶座进行钻孔;
37.步骤二:将橡胶座移动到筷筒处,在橡胶座移动过程转动排空橡胶座内碎屑;
38.步骤三:将筷筒固定,对筷筒进行钻孔,将筷筒和橡胶座组合;
39.步骤四;把胶水涂抹在筷筒上,将组合后筷筒和橡胶座固定在包装盒上。
40.如图2和3所示;
41.一种包装盒,一种包装盒上设有两个筷筒12,两个筷筒12上均固定有橡胶座13,两个橡胶座13上均设有夹紧孔14;
42.正常包装盒11在对食物进行包装后还需要带一双筷子,家用筷子非常不方便携带,而且家用筷子在携带后很容易弄脏,而且不然容易进行存放,如果将筷子放在包装盒11内部,筷子就会沾满食物,不易进行使用,通过本装置能够直接将筷子固定在包装盒11上,既能防止携带包装盒11后忘记携带筷子,还能便于对筷子进行存放,将餐具和包装盒1一体化,免去收容的麻烦,同时还能对筷子进行保护,避免筷子被弄脏而无法使用,在包装盒11上固定有两个筷筒12,可以直接将筷子放入筷筒12内,设有两个筷筒12,能够提高包装盒11对筷子的容量,如果在对包装盒11内食物进行食用过程中,筷子掉在地上或被弄脏,还能有一双备用筷子提供使用,为使用者提供后备保障,同时两个筷筒12上均设有橡胶座13,两个橡胶座13上均设有夹紧孔14,两个橡胶座13均为橡胶材质且两个夹紧孔14的孔径比筷子的直径小,这样在将筷子插入筷筒12后,筷子的头部会插入到两个夹紧孔14内,通过橡胶本身弹性将筷子夹紧进行固定,使得直接将筷子插入筷筒12就能将筷子固定,用力就能直接将筷子拔出,完成筷子的取出,使操作简单便捷,既能够充分的对筷子提供保护,使筷子保持整洁,还能方便老人小孩使用。
43.如图4和5所示;
44.所述一种包装盒加工方法还使用一种包装盒加工装置,一种包装盒加工装置包括支撑板110、丝杠120、滑动杆130、转动架140和夹紧板150,丝杠120转动连接在支撑板110上,两个滑动杆130均滑动连接在支撑板110上,丝杠120和两个滑动杆130之间螺纹传动,两个转动架140分别转动连接在两个滑动杆130上,多个夹紧板150分别滑动连接在两个转动架140上,多个夹紧板150和两个转动架140之间均设有弹簧;
45.丝杠120通过外部动力驱动,该外部动力选用减速电机,该减速电机固定连接在支撑板110上,丝杠120固定连接在减速电机的输出轴上,两个转动架140均通过减速电机驱动,两个减速电机分别固定连接在两个滑动杆130上;
46.本装置能够将两个筷筒12固定在包装盒11上,将包装盒11放置在支撑板110上,将包装盒11两端对应筷筒12的位置刷上胶水,先将两个筷筒12放置在两个转动架140上,左端的两个夹紧板150通过弹簧弹力向中间移动,两个夹紧板150向中间移动将筷筒12固定住,右端的两个夹紧板150向中间移动将筷筒固定住,减速电机的输出轴转动带动丝杠120转动,丝杠120转动两个滑动杆130向中间移动,两个滑动杆130向中间移动一段距离后将两个筷筒12内的孔加工出来,然后丝杠120转动带动两个滑动杆130向中间移动贴在包装盒11上,将两个筷筒12固定在包装盒11上,完成筷筒12的固定;
47.进一步的,两个筷筒12在加工完筷筒12内部的槽后,会有一些塑料碎屑留在筷筒12内,通过两个减速电机的输出轴转动带动两个转动架140转动,两个转动架140转动带动多个夹紧板150转动,多个夹紧板150转动带动两个筷筒12转动,两个筷筒12转动后发生倾斜,就能够使两个筷筒12内部的碎屑沿着两个筷筒12向下流出,完成对两个筷筒12内部的清洁,免去清理两个筷筒12内部的过程,提高加工出筷筒12的质量。
48.如图6所示;
49.一种包装盒加工装置包括推板210、带槽推板220和固定板230,推板210滑动连接在支撑板110上,固定板230固定连接在支撑板110上,两个带槽推板220均固定连接在推板210上;
50.推板210通过液压缸进行驱动,液压缸固定连接在支撑板110上,推板210固定连接在液压缸上;
51.在将包装盒11放置到支撑板110上以后,可以通过液压缸伸长带动推板210移动,推板210移动带动包装盒11移动,包装盒11移动一段距离后受到固定板230的限制无法移动,包装盒11被固定住,能够避免在将两个筷筒12固定到包装盒11上时包装盒11的位置改变,从而导致两个筷筒12不能充分固定在包装盒11上,包装盒11被固定后,两个筷筒12就能稳定充分的固定到包装盒11上,提高两个筷筒12固定后的位置的确定性和包装盒11整体的美观程度,使得加工出的包装盒11质量更好,
52.进一步的,推板210移动带动两个带槽推板220移动,两个带槽推板220移动带动两个筷筒12移动,使得两个筷筒12移动和两个橡胶座13组合,还能使包装盒11和两个筷筒12对齐,让两个筷筒12移动到合适的位置,提高两个筷筒12固定到包装盒11上后的整体美观程度。
53.如图7和8所示;
54.一种包装盒加工装置包括连接架310、转动轴320、转动杆330、移动框340、齿轮350、齿条轨道360、滑动板370和夹紧杆380,连接架310固定连接在支撑板110上,转动轴320转动连接在连接架310上,两个转动杆330分别固定连接在转动轴320的左右两端,两个移动框340分别转动连接在两个转动杆330上,多个齿轮350分别固定连接在两个移动框340上,多个齿轮350分别和多个齿条轨道360啮合传动,多个齿条轨道360均固定连接在连接架310上,齿条轨道360呈圆弧形,且齿条轨道360的几何中心位于转动轴320圆心处,多个夹紧杆380分别滑动连接在两个移动框340上,多个夹紧杆380和两个移动框340之间均设有弹簧,滑动板370滑动连接在移动框340上,滑动板370和移动框340之间通过弹簧连接;
55.转动轴320通过外部动力驱动,该外部动力选用减速电机,该减速电机固定连接在连接架310上,转动轴320固定连接在减速电机的输出轴上;
56.橡胶座13上的夹紧孔14和筷筒12上的孔径不同,所以橡胶座13和筷筒12需要分开加工,在对橡胶座13上的夹紧孔14加工完成后,还能自动将橡胶座13和筷筒12对齐,以便于进行橡胶座13和筷筒12之间的固定,免去人力进行对橡胶座13的运输和安装,提高整体的加工效率,节省人力物力,将橡胶座13放置在滑动板370上,两个夹紧杆380通过弹簧弹力向内移动,两个夹紧杆380向内移动将橡胶座13固定,便于对橡胶座13进行打孔,避免对橡胶座13进行打孔时橡胶座13的位置发生改变,导致橡胶座13上的夹紧孔14尺寸或者形状出现变化,而不能正常的对筷子进行夹紧,提高加工出橡胶座13的效果,在对橡胶座13的加工完成后,减速电机的输出轴转动带动转动轴320转动,转动轴320转动带动两个转动杆330转动,两个转动杆330转动带动两个移动框340位置发生变化,两个移动框340在移动过程中带动多个齿轮350移动,多个齿轮350移动过程中分别和多个齿条轨道360啮合发生转动,多个齿轮350转动带动两个移动框340转动,两个移动框340转动带动两个橡胶座13转动,两个橡胶座13转动450度后,位于两个筷筒12的前端,使得两个橡胶座13和两个筷筒12对应,便于将橡胶座13和筷筒12固定到一起,
57.进一步的,两个橡胶座13在打孔完成后内部还会有橡胶碎屑残留,这样的橡胶座13会因为内部的碎屑导致不能对筷子进行夹紧,在橡胶座13移动的过程中发生转动,在橡胶座13转动180度以后橡胶座13上的夹紧孔14朝下,这时橡胶座13内部的碎屑就会因自身重力落下,能够在调整两个橡胶座13位置的同时清理掉两个橡胶座13内部的碎屑,无需特别对两个橡胶座13内部的碎屑进行清理,节省了加工时间,提高加工效率。
58.如图9和10所示;
59.一种包装盒加工装置包括固定套410、转动杆420和滑轨430,两个固定套410分别滑动连接在两个滑轨430上,两个滑轨430均固定连接在支撑板110上,多个转动杆420分别转动连接在两个固定套410上,多个转动杆420分别转动连接在两个转动杆330上;
60.通过多个夹紧板150和两个转动架140对两个筷筒12进行夹紧,只能对两个筷筒12的是三个面进行固定,这样就导致在对两个筷筒12进行钻孔或者和两个橡胶座13进行固定过程中发生转动,导致不能准确的和两个橡胶座13进行固定,或者钻孔过程发生转动导致筷筒12损害,造成不必要的损失,通过固定套410移动套在筷筒12和多个夹紧板150的外部,从而避免筷筒12发生转动,使得筷筒12只能前后移动和橡胶座13进行组合,就能保证筷筒12在钻孔或者和橡胶座13进行组合的过程中保持稳定,
61.进一步的,通过两个转动杆330转动带动多个转动杆420转动,多个转动杆420转动带动两个固定套410滑动,两个固定套410滑动套在两个筷筒12上,两个固定套410内设有多个通槽,使得两个固定套410能够和转动架140和夹紧板150的形状配合充分套在筷筒12上,这时橡胶座13和筷筒12位置对应,随后对筷筒12进行打孔和组合过程总筷筒都会保持稳定,在完成组合过程后两个转动杆330反转带动两个移动框340复位同时也会带动两个固定套410复位,使得两个固定套410离开两个筷筒12,让两个筷筒12的一个端面均露出,这时两个筷筒12能够正常固定在包装盒11上。
62.如图11和12所示;
63.一种包装盒加工装置包括钻孔器510、滑块520、丝杠ⅱ530、移动座540、丝杠ⅲ550和钻孔器ⅱ560,两个钻孔器510分别固定连接在两个滑块520上,两个滑块520均和丝杠ⅱ530螺纹传动,丝杠ⅱ530转动连接在两个移动座540上,两个滑块520分别滑动连接在两个移动座540上,两个移动座540分别和两个丝杠ⅲ550螺纹传动,两个移动座540均滑动连接在支撑板110上,两个丝杠ⅲ550均转动连接在支撑板110,两个丝杠ⅲ550之间通过皮带传动,钻孔器ⅱ560固定在一个液压缸上,液压缸滑动在连接架310上;
64.丝杠ⅱ530和两个丝杠ⅲ550均通过减速电机驱动,其中一个减速电机固定连接在支撑板110上,其余一个减速电机固定连接在移动座540上;
65.通过两个丝杠ⅲ550转动带动两个移动座540前后移动,两个移动座540前后移动带动两个钻孔器510前后移动,丝杠ⅱ530转动带动两个移动座540同时向内或者向两端移动,两个移动座540同时向内或者向两端移动带动两个钻孔器510移动,使得两个钻孔器510能够移动到两个筷筒12内对两个筷筒12进行打孔,两个筷筒12还能左右移动在筷筒12内加工出长槽,便于放置筷子,两个钻孔器ⅱ560通过上下移动和水平移动对两个橡胶座13进行打孔。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。