1.本公开涉及农业装备领域,特别涉及一种带辅助行进作业功能的环切收割装置。
背景技术:
2.对于一些丛生植物,如沙柳等,其根系较为发达,上方枝条丛生呈火炬状。其耐盐碱性强,具有“平茬复壮”的生物习性,在收割后被砍下的枝条能够进行繁育或作为青贮饲料利用。目前丛生植物在进行平茬时,多从茎根部切断去除所有枝条,等待植物枝条重新生长。
3.但是,由于在平茬收割时采用了整体切割不留多余枝条,导致切割后的灌木从区域地面空旷,直接影响种植区域的防风和绿化效果;虽然在切割时保留部分枝条能够解决防风和绿化的问题,但由于丛生灌木周边枝条细嫩,松散分布无支撑点切割难度较大,传统切割工具难以精准对枝条根部进行局部切除,导致对丛生灌木枝条进行局部切割的难度较大。
技术实现要素:
4.本公开的目的是针对现有技术存在的缺陷,提供一种带辅助行进作业功能的环切收割装置,布置成对的切割机构,两个切割机构的切割区域能够靠近形成环形切割区域,其中间为非切割区域,从而对灌木的四周进行环切,保留灌木中心区域枝条,既能够满足平茬收割的需求,又能满足防风和绿化的需求。
5.为了实现上述目的,采用以下技术方案:
6.一种带辅助行进作业功能的环切收割装置,包括移动平台和成对设置的切割机构,每个切割机构包括至少两个回转刀盘,切割机构通过调节机构安装在移动平台,调节机构用于驱动切割机构沿水平方向往复运动,每个切割机构所有的回转刀盘的切割区域能够依次相交,形成半包围结构,每对切割机构的回转刀盘用于将灌木四周切割中心区域保留。
7.进一步地,所述切割机构上的回转刀盘轴线相平行布置,同一个切割机构上回转刀盘的切割区域依次相交。
8.进一步地,沿垂直于移动平台移动方向上,每对切割机构相对于移动平台中心线对称布置,调节机构驱动成对切割机构同步接近或远离。
9.进一步地,所述调节机构包括推拉机构和升降机构,回转刀盘安装在推拉机构上,推拉机构通过升降机构安装在移动平台上。
10.进一步地,还包括拢枝辊和拢枝杆,拢枝辊成对呈间隔布置在移动机构的端部,用于通过转动收拢灌木,拢枝杆杆成对呈间隔布置,相对布置的拢枝杆之间形成顺应移动平台移动方向的漏斗状拢枝通道。
11.进一步地,所述拢枝辊轴线竖直布置,能够绕其轴线自转,拢枝辊外圆周面上设有凸起,一堆拢枝辊的转动方向相反,用于使收拢的灌木进入拢枝通道内。
12.进一步地,所述拢枝杆设有多对,沿竖直方向依次间隔布置,切割机构用于环切拢
枝通道内的灌木并保留灌木的中心区域灌木枝条。
13.进一步地,所述移动平台包括龙门机架和成对布置在龙门机架上的行走轮,龙门机架能够通过行走轮沿灌木垄移动。
14.进一步地,龙门机架上安装有对中机构和控制器,沿移动平台移动方向上,对中机构包括一对布置在龙门机架前端的对中传感器,用于测取灌木的中心位置并发送至控制器,控制器用于控制行走轮调节移动平台位置,使灌木中心区域位于回转刀盘的中间非切割区域。
15.进一步地,所述移动平台上安装有至少一对切割机构,每个切割机构上安装有至少三个同步转动的回转刀盘。
16.与现有技术相比,本公开具有的优点和积极效果是:
17.(1)布置成对的切割机构,利用回转刀盘对灌木进行切割,两个切割机构的切割区域能够靠近形成环形切割区域,其中间为非切割区域,在其从两侧往中间靠近的过程中,能够形成收拢作用,从而边靠近边切割,对灌木的四周进行环切,保留灌木中心区域枝条,既能够满足平茬收割的需求,又能满足防风和绿化的需求。
18.(2)同一切割机构上的回转刀盘覆盖区域相交,并进行高度位置的避让以避免干涉,一对切割机构上的两组回转刀盘覆盖区域能够进行高度位置上的避让,通过两组回转刀盘的靠近,其对应的切割区域逐渐相交,形成类环形闭合切割区域,实现对灌木周向的切割覆盖,完成对灌木的环切。
19.(3)通过高度调节和水平调节,能够对回转刀盘的切割高度、切割区域进行调节,适应不同种类、不同体积灌木的环切需求,也可以通过调整回转刀盘直径、回转刀盘间距来改变整体切割区域的大小、形状满足不同的需求。
20.(4)通过拢枝辊和拢枝杆将丛生灌木的枝条进行收拢,汇集至两个切割机构之间,方便进行环切平茬处理,缩小切割机构的推进距离,提高切割效率。
21.(5)设置对中机构,根据丛生灌木的最大直径位置确定灌木的中心位置,利用对中机构与切割机构之间的间距,调整移动平台与丛生灌木的相对位置,从而使得灌木中心位于两个切割机构之间的中心位置,使得灌木中心处于非切割区域、灌木四周处于切割区域,形成环切位姿。
附图说明
22.构成本公开的一部分的说明书附图用来提供对本公开的进一步理解,本公开的示意性实施例及其说明用于解释本公开,并不构成对本公开的不当限定。
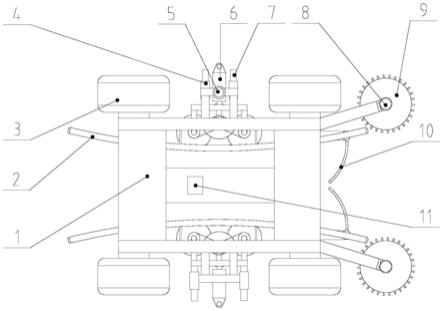
23.图1为本公开实施例1中带辅助行进作业功能的环切收割装置的俯视示意图;
24.图2为本公开实施例1中带辅助行进作业功能的环切收割装置的正式示意图;
25.图3为本公开实施例1中带辅助行进作业功能的环切收割装置切割机构的示意图。
26.其中,1
‑
机架,2
‑
拢枝杆,3
‑
行走轮,4
‑
升降连接架,5
‑
升降电机,6
‑
推拉电缸,7
‑
推拉连接架,8
‑
拢枝电机,9
‑
拢枝辊,10
‑
对中传感器,11
‑
控制器,12
‑
电池,13
‑
传动链轮,14刀盘总成,15
‑
刀盘电机,16
‑
丝杠导轨。
具体实施方式
27.实施例1
28.本公开的一个典型实施例中,如图1
‑
图3所示,给出一种带辅助行进作业功能的环切收割装置。
29.主要包括移动平台、切割机构、收拢机构、调节机构和对中机构,移动平台作为主体的承载机构,切割机构通过调节机构安装在移动平台上,收拢机构和对中机构分别安装在移动平台上,随移动平台共同移动。
30.移动平台为龙门式机架1,跨在灌木种植垄上移动,下方成对安装有行走轮3,为了方便进行转向和位置调整,每个行走轮进行单独驱动。
31.切割机构、收拢机构、调节机构和对中机构在移动平台上均分别呈对称布置,通过收拢机构对丛生灌木的枝条进行归拢,从垂直于移动方向上聚集从而缩小覆盖范围,方便进行切割平茬;对中机构测量的灌木枝条的最大直径位置,确定灌木的中心位置;移动平台根据测取的中心位置与切割机构作用范围的相对位置进行位置调节,使灌木中心位置处于切割机构作用范围的中心区域;切割机构在调节机构作用下进行高度的调节和水平方向的推进,利用切割机构上位置特殊布置的回转刀盘实现对灌木的环切。
32.具体的,参见图1,带辅助行进作业功能的环切收割装置,包括移动平台和成对设置的切割机构,每个切割机构包括至少两个回转刀盘,切割机构通过调节机构安装在移动平台,调节机构用于驱动切割机构沿水平方向往复运动,以改变成对切割机构的间距,每对切割机构所有的回转刀盘的切割区域能够依次相交,围绕形成带有中间非切割区域的类环形切割区域。
33.所述切割机构上的回转刀盘轴线相平行布置,同一个切割机构上回转刀盘的切割区域依次相交。
34.布置成对的切割机构,利用回转刀盘对灌木进行切割,两个切割机构的切割区域能够靠近形成环形切割区域,其中间为非切割区域,在其从两侧往中间靠近的过程中,能够形成收拢作用,从而边靠近边切割,对灌木的四周进行环切,保留灌木中心区域枝条;
35.既能够满足平茬收割的需求,又能满足防风和绿化的需求。
36.可以理解的是,在本实施例中,同一切割机构上的回转刀盘覆盖区域相交,并进行高度位置的避让以避免干涉,一对切割机构上的两组回转刀盘覆盖区域能够进行高度位置上的避让;
37.通过两组回转刀盘的靠近,其对应的切割区域逐渐相交,形成类环形闭合切割区域,实现对灌木周向的切割覆盖,完成对灌木的环切。
38.对于回转刀盘,如图1和图3所示,同一切割机构上设置有三个回转刀盘形成刀盘总成14,三个刀盘依次设置,进行高度上的避让,其切割区域在竖直投影方向上相交,拓展单个回转刀盘的切割区域。
39.其中一个回转刀盘连接有刀盘电机15进行驱动,同一切割机构上的其他两个回转刀盘分别通过传动链配合传动链轮13连接该回转刀盘,从而使得所有回转刀盘同步转动,用于对灌木枝条进行切割。
40.沿垂直于移动平台移动方向上,每对切割机构相对于移动平台中心线对称布置,调节机构驱动成对切割机构同步接近或远离。
41.如图1所示,一个切割机构上的三个回转刀盘的切割区域形成凹字形结构,另一个切割机构上的三个回转刀盘也形成凹字形结构,在调节机构的推动作用下,两个切割机构逐渐接近,两个凹字形结构对接形成闭合区域,该区域内的灌木不会受到回转刀盘的切割作用,回转刀盘经过的区域以及回转刀盘的切割区域接触到的灌木枝条被切割截断,形成类环形的切割区域,对中心非切割区域的灌木枝条进行保留。
42.对于调节机构,其包括推拉机构和升降机构,回转刀盘安装在推拉机构上,推拉机构通过升降机构安装在移动平台上。
43.所述升降机构包括升降连接架4、升降电机5和丝杠导轨16,丝杠导轨上配合有滑块结构,升降连接架通过滑块与丝杠导轨配合,丝杠导轨一端悬吊安装在移动平台上,升降电机驱动丝杠导轨,从而使滑块沿丝杠导轨轴向往复运动。
44.所述推拉机构包括推拉电缸6和推拉连接架7,推拉连接件连接升降连接架,推拉电缸一端安装在升降连接架上,另一端连接刀盘总成的支架部分。
45.通过高度调节和水平调节,能够对回转刀盘的切割高度、切割区域进行调节,适应不同种类、不同体积灌木的环切需求,也可以通过调整回转刀盘直径、回转刀盘间距来改变整体切割区域的大小、形状满足不同的需求。
46.可以理解的是,对于调节机构还可以采用其他的结构形式,能够满足对刀盘总成的高度调节和水平进给、回退动作即可。
47.当然,对于回转刀盘的数目,还可以对其数目、直径、间距等参数进行调节,从而对其切割区域的范围和非切割区域的范围进行调节,使其形成的切割区域能够适应环切平茬的需求。
48.所述拢枝机构包括拢枝辊9和拢枝杆2,拢枝辊成对呈间隔布置在移动机构的端部,用于通过转动收拢灌木,拢枝杆杆成对呈间隔布置,相对布置的拢枝杆之间形成顺应移动平台移动方向的漏斗状拢枝通道。
49.拢枝辊轴线竖直布置,拢枝辊通过拢枝电机8驱动,能够绕其轴线自转,拢枝辊外圆周面上设有凸起,一堆拢枝辊的转动方向相反,用于使收拢的灌木进入拢枝通道内;
50.拢枝辊通过转动配合凸起结构,勾挂并带动灌木枝条向内移动,利用凸起结构提高勾挂性能,方便对散乱的灌木枝条进行收拢作用。
51.拢枝杆设有多对,沿竖直方向依次间隔布置,切割机构用于环切拢枝通道内的灌木并保留灌木的中心区域灌木枝条。
52.通过拢枝辊和拢枝杆将丛生灌木的枝条进行收拢,汇集至两个切割机构之间,方便进行环切平茬处理,缩小切割机构的推进距离,提高切割效率。
53.龙门机架上安装有对中机构和控制器11,沿移动平台移动方向上,对中机构包括一对布置在龙门机架前端的对中传感器10,用于测取灌木的中心位置并发送至控制器,控制器用于控制行走轮调节移动平台位置,使灌木中心区域位于回转刀盘的中间非切割区域;
54.控制器连接有电池12,电池安装在龙门机架上,并对工作位置进行避让,减少外部干涉。
55.具体的,对于对中机构,采用能够绕一端转动的触发杆作为对中传感器,如图1所示,在初始状态下,两个触发杆相对布置,在接触灌木后,灌木推动触发杆转动,触发杆能够
根据摆动角度来计算此时两个触发点之间的间距,从而计算出此状态下的灌木的宽度,在整个灌木经过后,取其最大宽度位置即为灌木的直径位置,从而其中心位置为灌木中心区域。
56.可以理解的是,由于灌木呈火炬状,其横截面为圆形,两个触发杆触发角度相同时,反映灌木中心位置在车辆行驶方向上相同,且恰好位于切割机构的非切割区域,;当触发杆角度不同时,则反映出现了偏差,计算其偏差位置,并通过调节自走轮实现对移动平台位置进行调节,使其处于切割机构的中心位置;整个数据采集、处理和执行过程均通过控制器实现。
57.设置对中机构,根据丛生灌木的最大直径位置确定灌木的中心位置,利用对中机构与切割机构之间的间距,调整移动平台与丛生灌木的相对位置,从而使得灌木中心位于两个切割机构之间的中心位置,使得灌木中心处于非切割区域、灌木四周处于切割区域,形成环切位姿。
58.当然,此过程也可以替换为其他现有的对中方式,能够满足对中需求即可。
59.该机运行时,可以用遥控控制,在收割装置前进的过程中两侧笼枝辊9向内旋转将散开的枝叶集中到机器内部并沿着笼枝辊逐渐内移,当收割物零散分布的根接触到对中传感器10后,传感器触碰杆旋转发出角度信号给控制器,根据左右角度信号信息控制器可以自动调整四轮的转速改变机器行进方向,同时结合轮胎转速自动计算并控制机器行进直至机器走到收割物中心位置后停止,机器停止运动后两侧切割机构的升降电机开始动作通过编码器反馈信号利用位置控制将刀盘总成的距离地面高度调整到设定值,刀盘电机启动开始切割枝条,并通过进刀电缸逐步向中心推进,当进刀电缸反馈信息推进到设定的位置后则切割停止,完成一次收割过程。
60.以上所述仅为本公开的优选实施例而已,并不用于限制本公开,对于本领域的技术人员来说,本公开可以有各种更改和变化。凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

