1.本发明涉及一种消防设备,具体涉及一种消防灭火机器人。
背景技术:
2.消防机器人是特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。
3.随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。而随着当今社会的发展,机器人技术有了突飞猛进的发展,因此,消防机器人应运而生,消防机器人越来越多的代替消防队员进入到火场一线进行灭火战斗,减少人员伤害。
4.现有的消防机器人一般都配有重力平衡系统,以便防止消防机器人发生倾倒现象,但是,在一些较大的斜坡上,消防机器人依然会倾倒,从而影响消防机器人灭火效率。
技术实现要素:
5.本发明的主要目的是提供一种消防灭火机器人,在消防灭火机器人的车体内再安装一套平衡装置,使得消防灭火机器人在通过一些较大的斜坡时进行平衡操作,防止机器人倾倒。
6.为了完成上述目的,本发明提供了一种消防灭火机器人,包括本体,本体包括由外壳形成的箱体,箱体内设有隔板,隔板把箱体分隔为上箱体和下箱体,上箱体内安装有控制模块,下箱体内安装有用于平衡机器人的平衡装置,平衡装置与控制模块电连接,平衡装置包括左右平衡装置和前后平衡装置,前后平衡装置安装在左右平衡装置上,且左右平衡装置能够带动前后平衡装置向左或者向右运动,前后平衡装置用于防止机器人前后倾倒,左右平衡装置用于防止机器人左右倾倒。
7.优选的,左右平衡装置包括第一驱动电机、螺纹杆、左安装机座、右安装机座和导杆,第一驱动电机安装在左安装机座上,且左安装机座安装在下箱体的左侧,右安装机座安装在下箱体的右侧,螺纹杆的一端穿过左安装机座后与第一驱动电机连接,螺纹杆的另一端与右安装机座转动连接,导杆的一端与左安装机座固定连接,导杆的另一端与右安装机座固定连接。
8.进一步优选的,前后平衡装置包括安装块、第二驱动电机、驱动齿轮和齿轮条,安装块上设有螺纹孔和通孔,螺纹杆的另一端穿过安装块的螺纹孔后与右安装机座转动连接,导杆的另一端穿过安装块的通孔后与右安装机座固定连接,第二驱动电机安装在安装块的一侧,驱动齿轮安装在第二驱动电机上,驱动齿轮与齿轮条啮合连接,齿轮条与安装块滑动连接,且齿轮条安装在下箱体外,齿轮条的两端均安装有滚轮。
9.更进一下优选的,安装块上设有右托板,第二驱动电机固定安装在右托板上。
10.更进一下优选的,前后平衡装置还包括从动齿轮,安装块上设有左托板,从动齿轮安装在左托板上,从动齿轮与齿轮条啮合连接。
11.更进一下优选的,左托板上设有左插板,右托板上设有右插板,左插板穿过齿轮条后与底板连接,右插板穿过齿轮条后与底板连接,齿轮条能够与左插板和右插板滑动连接,且齿轮条能够在底板上滑动。
12.更进一下优选的,齿轮条上设有条形孔,左插板、右插板分别穿过条形孔后与底板连接。
13.更进一下优选的,左插板上设有左插孔,左固定板插设在左插孔内,左固定板用于托住底板。
14.更进一下优选的,右插板上设有右插孔,右固定板插设在右插孔内,右固定板用于托住底板。
15.本发明的有益效果为:本发明将车体内的空间通过隔板分隔成上箱体和下箱体,其中,将控制模块等电子元器件安装在上箱体内,在下箱体内安装平衡装置,以便辅助重力平衡系统,使得消防灭火机器人在上较陡的斜坡时,不会产生倾倒。具体的,通过调整前后平衡装置,防止消防灭火机器人前后倾倒。通过调整左右平衡装置,防止消防机器人左右倾倒。另外,在本发明中,将前后平衡装置安装在左右平衡装置上,通过调整前后平衡装置的位置以便防止消防机器人左右倾倒。
附图说明
16.下面结合附图和具体实施方式对本发明作进一步详细的说明。
17.图1是本发明的消防灭火机器人的整体结构示意图;图2是本发明的消防灭火机器人的车体的内部结构示意图;图3是图2的右视图;图4是图2的仰视图;图5是本发明的消防灭火机器人的平衡装置的结构示意图;图6是图5的俯视图;图7是本发明的消防灭火机器人的前后平衡装置的结构示意图。
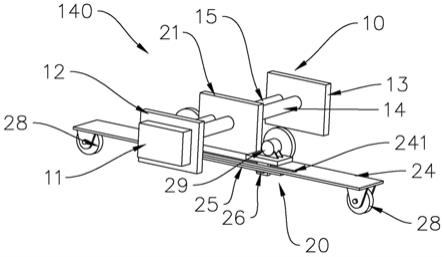
18.附图标记说明100、箱体;110、履带;120、上箱体;130、下箱体;140、平衡装置;101、前通孔;102、后通孔;10、左右平衡装置;11、第一驱动电机;12、左安装固定座;13、右安装固定座;14、螺纹杆;15、导杆;20、前后平衡装置;21、安装块;211、左托板;2111、左插板;212、右托板;2121、右插板;22、从动齿轮;23、驱动齿轮;24、齿轮条;241、条形孔;25、底板;26、右固定板;27、左固定板;28、滚轮;29、第二驱动电机。
具体实施方式
19.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以
采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
20.如图1所示,本实施例提供了一种消防灭火机器人,包括箱体100,在箱体100的顶部安装有喷水装置,箱体100两侧的安装有履带110,水管与喷水装置连接,通过喷水装置将灭火液体喷出。
21.具体的,在本实施例中,如图2和图3所示,箱体100内设有隔板,隔板把箱体100分隔为上箱体120和下箱体130,上箱体120内安装有控制模块、定位模块、水平高度模块等电子元器件,下箱体130内安装有用于平衡机器人的平衡装置140。具体的,在本实施例中,平衡装置140与控制模块电连接,平衡装置140包括左右平衡装置10和前后平衡装置20,其中,前后平衡装置20安装在左右平衡装置20上,且左右平衡装置10能够带动前后平衡装置20向左或者向右运动,前后平衡装置20用于防止机器人前后倾倒,左右平衡装置10用于防止机器人左右倾倒。
22.在本实施例中,如图5和图6所示,左右平衡装置10包括第一驱动电机11、螺纹杆14、左安装机座12、右安装机座13和导杆15。第一驱动电机11安装在左安装机座12上,且左安装机座12安装在下箱体130的左侧,右安装机座13安装在下箱体130的右侧,螺纹杆14的一端穿过左安装机座12后与第一驱动电机11连接,由第一驱动电机11驱动螺纹杆14转动,螺纹杆14的另一端与右安装机座13转动连接,导杆15的一端与左安装机座12固定连接,导杆15的另一端与右安装机座13固定连接。
23.在本实施例中,如图4、图5和图7所示,前后平衡装置20包括安装块21、第二驱动电机29、驱动齿轮23和齿轮条24,安装块21上设有螺纹孔和通孔,螺纹杆14的另一端穿过安装块21的螺纹孔后与右安装机座13转动连接,这样使得安装块21与螺纹杆14螺接,导杆15的另一端穿过安装块21的通孔后与右安装机座13固定连接,这样,当第一驱动电机11驱动螺纹杆14转动时,可以使得安装块21沿着导杆15做左右运动。第二驱动电机29安装在安装块21的一侧,具体的,在安装块21上设有右托板212,第二驱动电机29固定安装在右托板212上,驱动齿轮23安装在第二驱动电机29上,驱动齿轮23与齿轮条24啮合连接,当第二驱动电机29驱动驱动齿轮23转动时,驱动齿轮23能够带动齿轮条24前后运动。齿轮条24与安装块21滑动连接,且齿轮条24安装在下箱体130外,在齿轮条24上安装有滚轮28(在齿轮条24的前后两端分别安装有滚轮28)。另外,在本实施例中,为了使得齿轮条24保持直线运动,前后平衡装置20还包括从动齿轮22,在安装块21上设有左托板211,从动齿轮22将通过齿轮座安装在左托板211上,从动齿轮22与齿轮条24啮合连接。当齿轮条24向前或者向后移动时,从动齿轮22都将会转动。
24.在本实施例中,如图5和图7所示,在左托板211上设有左插板2111,右托板212上设有右插板2121,左插板2111穿过齿轮条24后与底板25连接,右插板2121穿过齿轮条24后与底板25连接,齿轮条24能够与左插板2111和右插板2121滑动连接,且齿轮条24能够在底板25上滑动。也就是说,左插板2111、右插板2121和底板25共同托住齿轮条24,防止齿轮条24掉落。具体的,在齿轮条24上设有条形孔241,左插板2111、右插板2121分别穿过条形孔241后与底板25连接。
25.在本实施例中,如图4所示,在左插板2111上设有左插孔,左固定板27插设在左插孔内,左固定板27用于托住底板25。在右插板2121上设有右插孔,右固定板26插设在右插孔
内,右固定板26用于托住底板25。也就是说,利用左固定板27和右固定板26托住底板25,进而托住齿轮条24。
26.本实施例中的平衡装置的具体工作方法为:当消防灭火机器人要上坡时,控制模块向第二驱动电机29发出信号,第二驱动电机29驱动驱动齿轮23转动(此时驱动齿轮23正转),从而使得齿轮条24向后运动,从而使得滚轮28向后运动,后端的滚轮28从而起到支撑消防灭火机器人的作用,防止灭火机器人向后倾倒。当消防灭火机器人下坡时,控制模块向第二驱动电机29发出信号,第二驱动电机29驱动驱动齿轮23转动(此时驱动齿轮23反转),使得齿轮条24向前运动,从而使得滚轮28向前运动,前端的滚轮28从而起到支撑消防灭火机器人的作用,防止灭后机器人向前倾倒。当消防灭火机器人的左侧位置较高时,控制模块向第一驱动电机11发出信号,使得第一驱动电机11转动(此时第一驱动电机11正转),驱动螺纹杆14转动,使得安装块21向左侧运动,从而使得前后平衡装置整体向左侧移动,从而增加左侧的重量,防止消防灭火机器人发生侧翻。当消防灭火机器人的右侧位置较高时,控制模块向第一驱动电机11发出信号,使得第一驱动电机11转动(此时第一驱动电机11反转),驱动螺纹杆14转动,使得安装块21向右侧运动,从而使得前后平衡装置整体向右侧移动,从而增加右侧的重量,防止消防灭火机器人发生侧翻。在实际工作中,可以根据实际需要调整左右平衡装置和前后平衡装置的位置,进而防止消防灭火机器人的发生倾倒现象。
27.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

