1.本发明涉及森林消防技术领域,更具体的说是涉及一种履带式智能森林火情巡检应急喷粉机器人。
背景技术:
2.作为重要的自然资源,森林对全球生态环境的调节、民族的兴衰和社会的持续发展都具有十分重要的意义,但是频发的森林火灾破坏性大、极易复燃,对经济发展和人民生命安全造成了严重影响。因此,森林防火巡检作为林业管理的重要内容,通过巡视及时发现和扑救火情,变有灾为无灾、变大灾为小灾已成为世界各个国家森林防火工作的一项重大课题。目前巡检工作主要采用传统的人工巡检方式,劳动强度大、工作效率较低、应急能力不足。
3.因此,提供一种结构简单,设计合理,操作方便,既能够进行森林的日常巡检工作,又可以在发现火情的情况下进行应急灭火处理的履带式智能森林火情巡检应急喷粉机器人是本领域技术人员亟需解决的问题。
技术实现要素:
4.有鉴于此,为了解决现有技术中人工巡检森林劳动强度大、工作效率低且应急能力不足等技术问题,本发明提供了一种结构简单,设计合理,操作方便,既能够进行森林的日常巡检工作,又可以在发现火情的情况下进行应急灭火处理的履带式智能森林火情巡检应急喷粉机器人。
5.为了实现上述目的,本发明采用如下技术方案:
6.一种履带式智能森林火情巡检应急喷粉机器人,包括:
7.车体,所述车体为中空结构,且所述车体侧壁上形成有车门,所述车体内前部为驾驶室,所述车体底部连接有车架;
8.行走组件,所述行走组件利用连接件转动连接在所述车架底部;
9.转台组件,所述转台组件包括转台底板、第一转动机构、第二转动机构和支撑机构,所述转台底板固定于所述车体内,所述第一转动机构设于所述转台底板底部,并与所述转台底板传动连接;所述支撑机构和所述第二转动机构均固定于所述转台底板顶部,且所述第二转动机构与所述支撑机构传动连接;
10.巡检组件,所述巡检组件包括红外摄像头、导航雷达和激光测温仪,所述红外摄像头固定于所述车体顶外壁上,所述导航雷达和所述激光测温仪均固定于所述车体的车头外壁上;
11.灭火组件,所述灭火组件设于所述车体内部,且所述灭火组件包括空气压缩机、传送管、干粉箱和喷嘴,所述传送管一端与所述空气压缩机连通,另一端与所述喷嘴连通,所述干粉箱放置于所述转台底板上,并利用连接管与所述喷嘴连通,所述喷嘴固定于所述支撑机构上,且其喷出端穿过所述车体后侧壁向外伸出;
12.控制箱,所述控制箱设于所述车体内,且所述控制箱与所述行走组件、所述第一转动机构、所述第二转动机构、所述红外摄像头、所述导航雷达、所述激光测温仪和所述空气压缩机电性连接。
13.经由上述的技术方案可知,与现有技术方案相比,本发明公开提供了一种履带式智能森林火情巡检应急喷粉机器人,通过利用行走组件能够带动车体进行移动,通过利用雷达导航能够为车体移动提供正确的巡检路线,通过利用激光测温仪和红外摄像头能够准确检测周围环境温度,确认有火情后可将火情信号发送给控制箱,并由控制箱控制空气压缩机将高压空气通过传送管进入喷嘴,并产生负压将干粉箱内的干粉颗粒经由连接管吸入喷嘴,使干粉颗粒在高速气体射流的卷吸和携带下以一定速度从喷嘴的喷出端喷射出去以便进行灭火,通过利用第一转动机构能够带动转台底板及其上的喷嘴在水平方向上进行转动,通过利用第二转动机构能够带动转台底板、支撑机构及其上的喷嘴进行俯仰运动,从而实现对喷嘴角度的调节,提高灭火效率。本发明的一种履带式智能森林火情巡检应急喷粉机器人,不仅结构简单,设计合理,操作方便,而且智能化程度高,巡检能力强,能够准确及时地发现火情并迅速灭火,且灭火效率高,有效降低了护林员的人工劳动强度,具有良好的应用前景。
14.进一步的,还包括防火车壳,所述防火车壳贴合固定于所述车体和所述车门外侧壁上。
15.采用上述技术方案产生的有益效果是,使得该喷粉机器人具有良好的防火耐火性能,结实耐用,保证了其正常工作运转。
16.进一步的,所述行走组件包括行走驱动电机、驱动轮、导向轮、支重轮和行走履带,所述行走驱动电机、所述驱动轮、所述导向轮和所述支重轮均利用连接件与所述车架连接,所述行走驱动电机设于所述驱动轮一侧,并与所述驱动轮传动连接,所述导向轮与所述驱动轮相对设置,所述支重轮设于所述导向轮和所述驱动轮之间,所述行走履带套设于所述驱动轮、所述导向轮和所述支重轮外部,所述控制箱与所述行走驱动电机电性连接,用于控制所述行走驱动电机。
17.采用上述技术方案产生的有益效果是,使得该喷粉机器人结构设计合理,传动结构稳定可靠,整体结构稳定性强,能够有效满足在森林地况下的巡检作业。
18.进一步的,所述支重轮为多个,且多个所述支重轮均匀间隔排布在所述驱动轮和所述导向轮之间。
19.采用上述技术方案产生的有益效果是,进一步提升了该喷粉机器人的整体结构稳定性。
20.进一步的,所述第一转动机构包括第一转动电机、主动齿轮、连接轴和从动齿轮,所述第一转动电机固定于所述车体底部,且其输出端与所述主动齿轮传动连接,所述连接轴垂直固定于所述转台底板底部,所述从动齿轮套接固定于所述连接轴外部,且所述从动齿轮与所述主动齿轮啮合连接,所述控制箱与所述第一转动电机电性连接,用于控制所述第一转动电机。
21.采用上述技术方案产生的有益效果是,使得该喷粉机器人结构简单,设计合理,通过利用第一转动电机能够带动转台底板在水平方向上的转动,从而带动喷嘴在水平方向的转动,提高灭火效率。
22.进一步的,所述支撑机构包括第一支撑板、第二支撑板、支撑顶板、第一定位轴和第二定位轴,所述第一支撑板和所述第二支撑板分别设于所述转台底板顶端面的两端,并均与所述转台底板垂直固定连接,所述干粉箱位于所述第一支撑板和所述第二支撑板之间,所述第一定位轴和所述第二定位轴分别穿过对应的所述第一支撑板侧壁和所述第二支撑板侧壁,并利用转动轴环抵接在所述干粉箱侧壁上,所述支撑顶板固定于所述第一支撑板和所述第二支撑板顶部,并与所述转台底板平行布置,且所述喷嘴固定于所述支撑顶板顶端面上,所述第一定位轴一端固定有蜗轮。
23.采用上述技术方案产生的有益效果是,使得该喷粉机器人整体结构紧凑性好,稳定性强。
24.进一步的,所述第二转动机构包括第二转动电机、电机安装架和蜗杆,所述电机安装架固定在所述第一支撑板侧壁上,所述第二转动电机固定在所述电机安装架上,且其输出轴穿过所述电机安装架侧壁与所述蜗杆传动连接,所述蜗杆与所述蜗轮啮合连接,所述控制箱与所述第二转动电机电性连接,用于控制所述第二转动电机。
25.采用上述技术方案产生的有益效果是,使得该喷粉机器人结构简单,设计合理,操作方便,通过利用第二转动电机能够带动转台底板进行俯仰运动,从而实现对喷嘴角度的调节,进一步提高灭火效率。
26.进一步的,所述巡检组件还包括触摸屏显示器,所述触摸屏显示器设于所述驾驶室内,且所述触摸屏显示器与所述控制箱电性连接。
27.采用上述技术方案产生的有益效果是,使得该喷粉机器人结构设计合理,功能丰富,智能化程度高,触摸屏显示器能够及时提示护林员采取灭火措施,且便于护林员操作控制箱进行应急处理。
28.进一步的,所述驾驶室内还设有座椅和方向盘,所述座椅和所述方向盘相对布置,所述方向盘与所述导向轮线路连接,所述触摸显示屏设于所述方向盘上方。
29.采用上述技术方案产生的有益效果是,使得该喷粉机器人结构设计合理,操作方便,有效降低了护林员的操作难度。
30.进一步的,还包括供电组件,所述供电组件固定于所述车架底部,且所述供电组件与所述控制箱、所述行走驱动电机、所述第一转动电机、所述第二转动电机、所述红外摄像头、所述导航雷达、所述激光测温仪和所述空气压缩机和所述触摸屏显示器电性连接,用于为所述控制箱、所述行走驱动电机、所述第一转动电机、所述第二转动电机、所述红外摄像头、所述导航雷达、所述激光测温仪和所述空气压缩机和所述触摸屏显示器供电。
31.可选地,所述供电组件为锂电池。
32.采用上述技术方案产生的有益效果是,使得该喷粉机器人结构设计合理,功能完善,能够为喷粉机器人的正常工作运转提供持续稳定的电力支撑,且更换方便。
附图说明
33.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
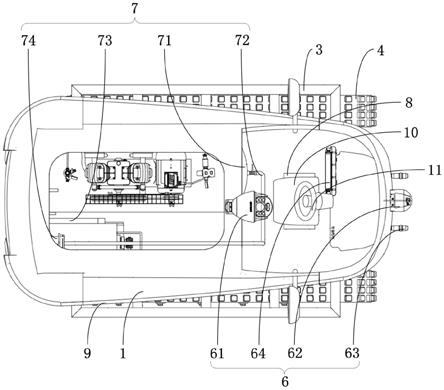
34.图1附图为本发明提供的一种履带式智能森林火情巡检应急喷粉机器人内部的俯视图;
35.图2附图为本发明提供的一种履带式智能森林火情巡检应急喷粉机器人的侧视图;
36.图3附图为本发明提供的一种履带式智能森林火情巡检应急喷粉机器人中转台组件的侧视图;
37.图4附图为本发明提供的一种履带式智能森林火情巡检应急喷粉机器人中转台组件的俯视图;
38.图5附图为本发明提供的一种履带式智能森林火情巡检应急喷粉机器人中行走组件的结构示意图。
39.其中:1
‑
车体,2
‑
车门,3
‑
车架,4
‑
行走组件,41
‑
行走驱动电机,42
‑
驱动轮,43
‑
导向轮,44
‑
支重轮,45
‑
行走履带,5
‑
转台组件,51
‑
转台底板,52
‑
第一转动机构,521
‑
第一转动电机,522
‑
主动齿轮,523
‑
连接轴,524
‑
从动齿轮,53
‑
第二转动机构,531
‑
第二转动电机,532
‑
电机安装架,533
‑
蜗杆,54
‑
支撑机构,541
‑
第一支撑板,542
‑
第二支撑板,543
‑
第一定位轴,544
‑
第二定位轴,545
‑
蜗轮,6
‑
巡检组件,61
‑
红外摄像头,62
‑
导航雷达,63
‑
激光测温仪,64
‑
触摸屏显示器,7
‑
灭火组件,71
‑
空气压缩机,72
‑
传送管,73
‑
干粉箱,74
‑
喷嘴,8
‑
控制箱,9
‑
防火车壳,10
‑
座椅,11
‑
方向盘,12
‑
供电组件。
具体实施方式
40.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
41.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
42.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
43.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
44.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在
第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
45.本发明公开了一种履带式智能森林火情巡检应急喷粉机器人,包括:
46.车体1,车体1为中空结构,且车体1侧壁上形成有车门2,车体1内前部为驾驶室,车体1底部连接有车架3;
47.行走组件4,行走组件4利用连接件转动连接在车架3底部;
48.转台组件5,转台组件5包括转台底板51、第一转动机构52、第二转动机构53和支撑机构54,转台底板51固定于车体1内,第一转动机构52设于转台底板51底部,并与转台底板51传动连接;支撑机构54和第二转动机构53均固定于转台底板51顶部,且第二转动机构53与支撑机构54传动连接;
49.巡检组件6,巡检组件6包括红外摄像头61、导航雷达62和激光测温仪63,红外摄像头61固定于车体1顶外壁上,导航雷达62和激光测温仪63均固定于车体1的车头外壁上;
50.灭火组件7,灭火组件7设于车体1内部,且灭火组件7包括空气压缩机71、传送管72、干粉箱73和喷嘴74,传送管72一端与空气压缩机71连通,另一端与喷嘴74连通,干粉箱73放置于转台底板51上,并利用连接管与喷嘴74连通,喷嘴74固定于支撑机构54上,且其喷出端穿过车体1后侧壁向外伸出;
51.控制箱8,控制箱8设于车体1内,且控制箱8与行走组件4、第一转动机构52、第二转动机构53、红外摄像头61、导航雷达62、激光测温仪63和空气压缩机71电性连接。
52.根据本发明的一个可选实施例,还包括防火车壳9,防火车壳9贴合固定于车体1和车门2外侧壁上,从而使得该喷粉机器人具有良好的防火耐火性能,结实耐用,保证了其正常工作运转。
53.根据本发明的一个可选实施例,行走组件4包括行走驱动电机41、驱动轮42、导向轮43、支重轮44和行走履带45,行走驱动电机41、驱动轮42、导向轮43和支重轮44均利用连接件与车架3连接,行走驱动电机41设于驱动轮42一侧,并与驱动轮42传动连接,导向轮43与驱动轮42相对设置,支重轮44设于导向轮43和驱动轮42之间,行走履带45套设于驱动轮42、导向轮43和支重轮44外部,控制箱8与行走驱动电机41电性连接,用于控制行走驱动电机41,从而使得该喷粉机器人结构设计合理,传动结构稳定可靠,整体结构稳定性强,能够有效满足在森林地况下的巡检作业。
54.根据本发明的一个可选实施例,支重轮44为多个,且多个支重轮44均匀间隔排布在驱动轮42和导向轮43之间,从而进一步提升了该喷粉机器人的整体结构稳定性。
55.根据本发明的一个可选实施例,第一转动机构52包括第一转动电机521、主动齿轮522、连接轴523和从动齿轮524,第一转动电机521固定于车体1底部,且其输出端与主动齿轮522传动连接,连接轴523垂直固定于转台底板51底部,从动齿轮524套接固定于连接轴523外部,且从动齿轮524与主动齿轮522啮合连接,控制箱8与第一转动电机521电性连接,用于控制第一转动电机521,从而使得该喷粉机器人结构简单,设计合理,通过利用第一转动电机能够带动转台底板在水平方向上的转动,从而带动喷嘴在水平方向的转动,提高灭火效率。
56.根据本发明的一个可选实施例,支撑机构54包括第一支撑板541、第二支撑板542、支撑顶板、第一定位轴543和第二定位轴544,第一支撑板541和第二支撑板542分别设于转
台底板51顶端面的两端,并均与转台底板51垂直固定连接,干粉箱73位于第一支撑板541和第二支撑板542之间,第一定位轴543和第二定位轴544分别穿过对应的第一支撑板541侧壁和第二支撑板542侧壁,并利用转动轴环抵接在干粉箱73侧壁上,支撑顶板固定于第一支撑板541和第二支撑板542顶部,并与转台底板51平行布置,且喷嘴74固定于支撑顶板顶端面上,第一定位轴543一端固定有蜗轮545,从而使得该喷粉机器人整体结构紧凑性好,稳定性强。
57.根据本发明的一个可选实施例,第二转动机构53包括第二转动电机531、电机安装架532和蜗杆533,电机安装架532固定在第一支撑板541侧壁上,第二转动电机531固定在电机安装架532上,且其输出轴穿过电机安装架532侧壁与蜗杆533传动连接,蜗杆533与蜗轮545啮合连接,控制箱8与第二转动电机531电性连接,用于控制第二转动电机531,从而使得该喷粉机器人结构简单,设计合理,操作方便,通过利用第二转动电机能够带动转台底板进行俯仰运动,从而实现对喷嘴角度的调节,进一步提高灭火效率。
58.根据本发明的一个可选实施例,巡检组件6还包括触摸屏显示器64,触摸屏显示器64设于驾驶室内,且触摸屏显示器64与控制箱8电性连接,从而使得该喷粉机器人结构设计合理,功能丰富,智能化程度高,触摸屏显示器能够及时提示护林员采取灭火措施,且便于护林员操作控制箱进行应急处理。
59.根据本发明的一个可选实施例,驾驶室内还设有座椅10和方向盘11,座椅10和方向盘11相对布置,方向盘11与导向轮43线路连接,触摸显示屏设于方向盘11上方,从而使得该喷粉机器人结构设计合理,操作方便,有效降低了护林员的操作难度。
60.根据本发明的一个可选实施例,还包括供电组件12,供电组件12固定于车架3底部,且供电组件12与控制箱8、行走驱动电机41、第一转动电机521、第二转动电机531、红外摄像头61、导航雷达62、激光测温仪63和空气压缩机71和触摸屏显示器64电性连接,用于为控制箱8、行走驱动电机41、第一转动电机521、第二转动电机531、红外摄像头61、导航雷达62、激光测温仪63和空气压缩机71和触摸屏显示器64供电;具体地,供电组件12为锂电池,使得该喷粉机器人结构设计合理,功能完善,能够为喷粉机器人的正常工作运转提供持续稳定的电力支撑,且更换方便。
61.本发明的一种履带式智能森林火情巡检应急喷粉机器人,通过利用行走组件能够带动车体进行移动,通过利用雷达导航能够为车体移动提供正确的巡检路线,通过利用激光测温仪和红外摄像头能够准确检测周围环境温度,确认有火情后可将火情信号发送给控制箱,并由控制箱控制空气压缩机将高压空气通过传送管进入喷嘴,并产生负压将干粉箱内的干粉颗粒经由连接管吸入喷嘴,使干粉颗粒在高速气体射流的卷吸和携带下以一定速度从喷嘴的喷出端喷射出去以便进行灭火,通过利用第一转动机构能够带动转台底板及其上的喷嘴在水平方向上进行转动,通过利用第二转动机构能够带动转台底板、支撑机构及其上的喷嘴进行俯仰运动,从而实现对喷嘴角度的调节,提高灭火效率。该喷粉机器人不仅结构简单,设计合理,操作方便,而且智能化程度高,巡检能力强,能够准确及时地发现火情并迅速灭火,且灭火效率高,有效降低了护林员的人工劳动强度,具有良好的应用前景。
62.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不
必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
63.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

