1.本发明涉及机器人拧紧技术领域,具体为一种机械手对套筒自动换型机构。
背景技术:
2.发动机、变速箱装配时因柔性化的需求常使用机器人来拧紧设备螺栓,此时若因螺栓规格不同时则需要更换拧紧螺栓的套筒,目前传统机器人拧紧设备的套筒更换都是由人工来完成,不但浪费人力并且效率低下,随着客户产品多样化及高效可靠的要求,人工更换套筒已跟不上自动化的步伐,为此,我们提出一种机械手对套筒自动换型机构。
技术实现要素:
3.本发明的目的在于提供一种机械手对套筒自动换型机构,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种机械手对套筒自动换型机构,包括中轴、弹簧、滑套、钢球、止动套、驱动头、夹紧气缸和推拉气缸,所述中轴外表面的底部设置有止动套,中轴的外表面且位于止动套的上端套设有滑套,所述中轴的外表面且位于滑套的内侧设置有钢球,中轴的外表面且位于滑套的顶部套设有弹簧,所述中轴的底部设置有驱动头,且驱动头右侧的下端设置有夹紧气缸,同时,夹紧气缸的底部设置有推拉气缸。
5.优选的,所述钢球的数量为多个,且每两个相邻钢球之间的距离均相同。
6.优选的,所述弹簧的顶部与中轴外表面的顶部固定连接,且弹簧的底部与滑套的顶部固定连接。
7.优选的,所述滑套为斜楔结构,且中轴的底部与驱动头的顶部接触。
8.优选的,所述夹紧气缸和推拉气缸的型号相同。
9.与现有技术相比,本发明的有益效果如下:
10.本发明设置了中轴、弹簧、滑套、钢球、止动套、驱动头、夹紧气缸和推拉气缸,驱动头通过钢球与中轴定位,钢球被滑套内壁限制了横向的移动,此时钢球就会通过驱动头的凹槽将驱动头和中轴锁死成一个整体,这时就可以进行正常的拧紧动作,当需要更换套筒时,机器人带动拧紧机构插入到止动套中,此时止动套将推动滑套压缩弹簧,滑套上滑后,它的斜楔结构会解除钢球的横向移动,此时下方的夹紧气缸和推拉气缸就可以将驱动头与中轴分离,当需要更换新的套筒时,机器人插入到待更换的止动套中,同样的利用止动套压缩弹簧后将滑套上推一点,此时夹紧气缸和推拉气缸将需要的套筒顶进中轴上,机器人在往上退回时,弹簧推动滑套,再利用滑套内壁再次限位钢球,如此重复完成套筒的更换,是靠调节弹簧压缩量来控制摩擦片之间的摩擦力矩,这是很有必要的,因为我们可以根据计算或经验来设定弹簧的压紧力,从而控制预设摩擦力矩稍大于负载力矩,这样达到输送负载的同时,摩擦片与定位套之间也不会因为过大的压紧力而快速磨损,因此,它可作为一种可标准化、大批量生产的输送滚轮,在满足不同客户要求的同时还可节约大量成本。
附图说明
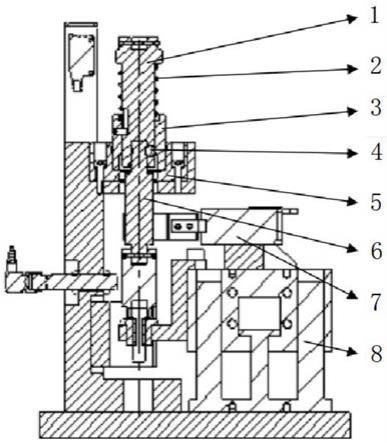
11.图1为本发明结构示意图;
12.图2为本发明中轴结构示意图。
13.图中:1中轴、2弹簧、3滑套、4钢球、5止动套、6驱动头、7夹紧气缸、8推拉气缸。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
16.本技术的中轴1、弹簧2、滑套3、钢球4、止动套5、驱动头6、夹紧气缸7和推拉气缸8部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
17.请参阅图1
‑
2,一种机械手对套筒自动换型机构,包括中轴1、弹簧2、滑套3、钢球4、止动套5、驱动头6、夹紧气缸7和推拉气缸8,中轴1外表面的底部设置有止动套5,中轴1的外表面且位于止动套5的上端套设有滑套3,中轴1的外表面且位于滑套3的内侧设置有钢球4,钢球4的数量为多个,且每两个相邻钢球4之间的距离均相同,中轴1的外表面且位于滑套3的顶部套设有弹簧2,弹簧2的顶部与中轴1外表面的顶部固定连接,且弹簧2的底部与滑套3的顶部固定连接,中轴1的底部设置有驱动头6,滑套3为斜楔结构,且中轴1的底部与驱动头6的顶部接触,且驱动头6右侧的下端设置有夹紧气缸7,同时,夹紧气缸7的底部设置有推拉气缸8,夹紧气缸7和推拉气缸8的型号相同,驱动头6通过钢球4与中轴1定位,钢球4被滑套3内壁限制了横向的移动,此时钢球4就会通过驱动头6的凹槽将驱动头6和中轴1锁死成一个整体,这时就可以进行正常的拧紧动作,当需要更换套筒时,机器人带动拧紧机构插入到止动套5中,此时止动套5将推动滑套3压缩弹簧2,滑套3上滑后,它的斜楔结构会解除钢球4的横向移动,此时下方的夹紧气缸7和推拉气缸8就可以将驱动头6与中轴1分离,当需要更换新的套筒时,机器人插入到待更换的止动套5中,同样的利用止动套5压缩弹簧2后将滑套3上推一点,此时夹紧气缸7和推拉气缸8将需要的套筒顶进中轴1上,机器人在往上退回时,弹簧2推动滑套3,再利用滑套3内壁再次限位钢球4,如此重复完成套筒的更换,是靠调节弹簧2压缩量来控制摩擦片之间的摩擦力矩,这是很有必要的,因为我们可以根据计算或经验来设定弹簧2的压紧力,从而控制预设摩擦力矩稍大于负载力矩,这样达到输送负载的同时,摩擦片与定位套之间也不会因为过大的压紧力而快速磨损,因此,它可作为一种可标准化、大批量生产的输送滚轮,在满足不同客户要求的同时还可节约大量成本。
18.使用时,设置了中轴1、弹簧2、滑套3、钢球4、止动套5、驱动头6、夹紧气缸7和推拉气缸8,驱动头6通过钢球4与中轴1定位,钢球4被滑套3内壁限制了横向的移动,此时钢球4
就会通过驱动头6的凹槽将驱动头6和中轴1锁死成一个整体,这时就可以进行正常的拧紧动作,当需要更换套筒时,机器人带动拧紧机构插入到止动套5中,此时止动套5将推动滑套3压缩弹簧2,滑套3上滑后,它的斜楔结构会解除钢球4的横向移动,此时下方的夹紧气缸7和推拉气缸8就可以将驱动头6与中轴1分离,当需要更换新的套筒时,机器人插入到待更换的止动套5中,同样的利用止动套5压缩弹簧2后将滑套3上推一点,此时夹紧气缸7和推拉气缸8将需要的套筒顶进中轴1上,机器人在往上退回时,弹簧2推动滑套3,再利用滑套3内壁再次限位钢球4,如此重复完成套筒的更换,是靠调节弹簧2压缩量来控制摩擦片之间的摩擦力矩,这是很有必要的,因为我们可以根据计算或经验来设定弹簧2的压紧力,从而控制预设摩擦力矩稍大于负载力矩,这样达到输送负载的同时,摩擦片与定位套之间也不会因为过大的压紧力而快速磨损,因此,它可作为一种可标准化、大批量生产的输送滚轮,在满足不同客户要求的同时还可节约大量成本。
19.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

