一种面向水下无人艇
‑
双机械臂作业系统的动力学耦合效应评价方法
技术领域
1.本发明属于水下机器人控制领域,更具体地,涉及一种面向水下无人艇
‑
双机械臂作业系统的动力学耦合效应评价方法。
背景技术:
2.海洋是人类资源宝库,约占地球表面总面积的71%,储存着约占全球97%的水量,蕴藏着丰富的石油天然气资源、矿产资源及生物资源,也是各国竞争的重要战略空间,因此,海洋作业装备发展逐渐为各国所重视。随着海洋开发与自主作业技术日益发展,多种先进水下作业装备应运而生,其中,水下无人艇
‑
双机械臂系统在海洋科考、海底大型生产系统自主运维、深海特种装备布放等水下作业任务中得到广泛应用。水下无人艇
‑
双机械臂系统在作业能力方面有着较多优点,例如抓取更稳定、负载能力更大、抓取方式更灵活等。然而,由于艇
‑
双机械臂间存在动力学耦合效应,双机械臂的运动会对水下无人艇母体造成耦合扰动,当水下无人艇母体与双机械臂尺度之比较小时,所造成的耦合扰动较大,将导致母体位姿控制稳定性降低,产生明显的位姿偏移,致使双机械臂无法精准完成目标抓取任务,甚至导致系统失稳,与目标物或周围环境发生碰撞,造成设备损坏及经济损失。因此,若水下无人艇
‑
双机械臂系统在设计上不合理导致无人艇与双机械臂之间耦合效应过大,将大幅增大控制难度。
3.目前,水下无人艇
‑
机械臂系统多采用配备小型机械臂的措施以解决无人艇与机械臂之间耦合互扰问题,该措施确保水下无人艇母体与机械臂尺度之比较大,从而机械臂运动对水下无人艇母体造成的动力学耦合扰动在一定程度上可以忽略不计。然而,小型机械臂作业空间局限性较大,间接降低了水下作业型机器人的作业能力;若配备大型机械臂,作业空间得到相应提升,但过大的机械臂可能导致水下无人艇
‑
机械臂系统失稳,控制难度陡增。综上所述,水下无人艇
‑
双机械臂系统设计上的一大关键要素是合理选择水下无人艇母体及作业型机械臂之间的尺度之比,在保证系统拥有良好操纵性的同时,降低机械臂作业空间的局限性。因此,需要一种合理量化该系统耦合效应的评价方法,基于该方法分析艇
‑
双机械臂尺度比与耦合效应之间的映射关系,进而可为艇
‑
双机械臂尺度比的优化设计提供理论支撑,以确保系统拥有良好的操纵性能及充足的作业空间。
技术实现要素:
4.本发明的目的在于提供一种面向水下无人艇
‑
双机械臂作业系统的动力学耦合效应评价方法,以评价并量化系统动力学耦合效应,为艇
‑
双机械臂尺度比优化设计提供理论依据,确保水下无人艇
‑
双机械臂系统的作业空间及动力学耦合效应的合理性,为水下无人艇
‑
双机械臂系统稳定、精准作业提供理论支撑。
5.为了实现上述目的,本发明采用的技术方案包括如下内容。
6.本发明提出一种面向水下无人艇
‑
双机械臂作业系统的动力学耦合效应评价方
法,其主要思想如下:首先,为量化并评价水下无人艇
‑
双机械臂作业系统耦合效应,提出一种复合动力学耦合因子;其次,基于该复合动力学耦合因子,设计了水下无人艇
‑
双机械臂系统耦合效应评价试验方法;再次,基于上述试验方法,针对水下无人艇
‑
双机械臂系统在不同艇
‑
双机械臂尺度比下进行水下无人艇
‑
双机械臂系统耦合效应评价试验;最后,基于上述试验结果,提取水下无人艇
‑
双机械臂系统耦合效应与艇
‑
双机械臂尺度比之间的映射关系,提出艇
‑
双机械臂尺度比优化设计方法,为水下无人艇
‑
双机械臂系统结构优化设计提供理论支撑。
7.所提出的复合动力学耦合因子定义如下:
8.假设水下无人艇
‑
双机械臂系统在双机械臂运动过程中,水下无人艇母体在不施加外部动力学控制条件下,无人艇位姿各自由度的动态响应为其中δx、δy、δz、δθ、δψ分别表示无人艇的纵荡、横荡、垂荡、纵摇、横摇及艏摇,从而定义其耦合动态响应为:
[0009][0010][0011]
式中,δ
linear
及δ
angular
表示水下无人艇母体平动及转动两方面的耦合动态响应,从而,设计平动耦合因子χ
linear
及转动耦合因子χ
angular
为:
[0012][0013][0014]
式中,l
m
表示机械臂总长度,表示从水下无人艇母体坐标系到机械臂基座坐标系的平移变换向量,c表示与机械臂关节构型相关的系数,系数c的定义式为:
[0015][0016]
式中,l表示水下无人艇母体坐标系原点到机械臂末端执行器的距离。由于构成封闭多边形,因此c的取值与机械臂关节构型有关,其取值范围为(0,1),进而定义水下无人艇
‑
双机械臂系统复合动力学耦合因子为:
[0017]
χ=χ
linear
χ
angular
[0018]
所提出的复合动力学耦合因子设计思想:水下无人艇
‑
双机械臂系统在双机械臂运动时,该系统动力学耦合效应对水下无人艇母体位姿产生耦合扰动,由于系统作业目标为控制双机械臂精准抓取水下目标物,因此该扰动引起的机械臂末端执行机构位姿波动程度是评价该系统动力学耦合效应的关键要素。设水下无人艇母体位置及姿态改变造成的机械臂末端执行机构位置变化分别为δ
m,l
及δ
m,a
,考虑l
m
可代表机械臂工作空间大小,则系统动力学耦合因子可定义为:
[0019][0020][0021]
对于平动耦合因子而言,水下无人艇母体位置变化等价映射至机械臂末端执行器位置变化,因此δ
m,l
=δ
linear
,可得平动耦合因子定义式:
[0022][0023]
对于转动耦合因子而言,水下无人艇母体姿态角变化与机械臂末端执行器位置变化映射关系如下:
[0024][0025]
由于:
[0026][0027]
因此,可得转动耦合因子定义式为:
[0028][0029]
在此基础上,设计水下无人艇
‑
双机械臂系统耦合效应评价试验。
[0030]
试验方式1:水下无人艇母体无外部动力学控制输入,即自身水下推进器不运作,控制机械臂从初始关节构型运动至目标关节构型其中n表示机械臂关节数,表示机械臂第j个关节的初始角度,表示机械臂第j个关节的目标角度(j=1,2,...,n)。试验时间t后记录水下无人艇母体纵荡、横荡、垂荡、纵摇、横摇及艏摇在试验过程中的最大值,得到耦合动态响应根据所提出的动力学耦合因子计算式求得水下无人艇
‑
双机械臂系统耦合动态响应量化评价结果。
[0031]
试验方式2:仅给予水下无人艇母体纵向(x方向)推进力,其他方向无外部动力学控制输入,使水下无人艇在无外部干扰时可保持在x方向上的匀速直线运动,控制机械臂从初始关节构型运动至目标关节构型试验时间t后记录水下无人艇母体横荡、垂荡、纵摇、横摇及艏摇在试验过程中的最大值,得到耦合动态响应其中δx取0,根据所提出的动力学耦合
因子计算式求得水下无人艇
‑
双机械臂系统耦合动态响应量化评价结果。
[0032]
基于所提出的水下无人艇
‑
双机械臂系统耦合效应评价试验方法,以不同艇
‑
双机械臂尺度比为变量进行仿真试验,求得不同艇
‑
双机械臂尺度比下对应的水下无人艇
‑
双机械臂系统动力学耦合效应量化评价结果,绘制艇
‑
双机械臂尺度比与耦合效应的映射关系曲线,根据结构设计要求所确定的最大许可艇
‑
双机械臂尺度比及最大许可耦合效应在该映射关系曲线图中划定优化区间,取该区间中值作为艇
‑
双机械臂尺度比优化设计点。
[0033]
本发明的有益效果在于:
[0034]
本发明设计了一种面向水下无人艇
‑
双机械臂作业系统的动力学耦合效应评价方法。该方法通过量化水下无人艇在机械臂耦合扰动下的耦合动态响应评价水下无人艇
‑
双机械臂系统耦合效应强弱。进而基于该方法可评价系统在不同艇
‑
双机械臂尺度比下的耦合效应,为尺度比优化设计提供理论依据。艇
‑
双机械臂尺度比优化设计的益处在于:经过优化设计的艇
‑
双机械臂尺度比在保证机械臂作业空间充足的同时,避免系统存在过大的耦合效应,使水下无人艇
‑
双机械臂系统的运动更稳定,提高系统安全性及操纵性。
[0035]
本发明提出了一种复合动力学耦合因子,该耦合因子充分考虑了水下无人艇在机械臂运动耦合扰动下位置及姿态的耦合动态响应,结合双机械臂工作空间,合理量化水下无人艇
‑
双机械臂系统耦合效应,为系统耦合效应评价及尺度比优化提供理论支撑。
附图说明
[0036]
图1为水下无人艇
‑
双机械臂作业系统示意图;
[0037]
图2为实施例中水下双机械臂结构示意图;
[0038]
图3为本发明所提出的耦合因子求解示意图;
[0039]
图4为水下双机械臂作业空间示意图;
[0040]
图5为两种尺度比下无人艇位姿变化曲线;
[0041]
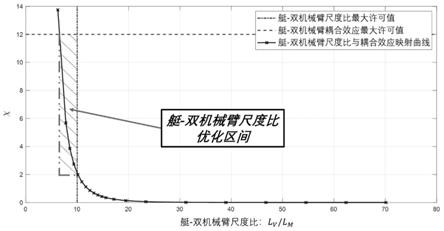
图6为艇
‑
双机械臂尺度比与系统耦合效应映射关系曲线。
具体实施方式
[0042]
为了更好的理解本发明,下面结合附图和实施例对本发明的技术方案作详细的描述。
[0043]
如图1所示为水下无人艇
‑
双机械臂作业系统示意图。该水下双机械臂具体参数如下表所示。
[0044]
表1双机械臂参数
[0045][0046]
如图2所示,可将该双机械臂划分为肩关节(肩部分)、大臂关节(大臂部分)、小臂关节(小臂部分)、手腕关节(腕部分)、爪关节(爪部分)五个部分。
[0047]
所述肩部分包括:肩关节电机
‑
115、底座
‑
135、垫板
‑
147、轴承盖
‑
145、传动轴1
‑
146、电机盖
‑
144、隔垫;垫板
‑
147一端与水下无人潜航器(搭载物)连接,另一端与底座
‑
135连接,轴承盖
‑
145、电机盖
‑
144安装在底座
‑
135两侧,肩关节电机
‑
115安装于底座
‑
135一侧,与传动轴1
‑
146通过电机轴连接,传递电机转动。
[0048]
所述大臂部分包括:大臂关节电机
‑
119、短臂
‑
134、轴承盖
‑
145、传动轴2
‑
149、电机盖
‑
144、大臂
‑
84、隔垫;短臂
‑
134与传动轴1
‑
146连接,大臂关节电机
‑
119和传动轴2
‑
149安装在短臂
‑
134和大臂
‑
84交界圆处,通过电机轴连接,轴承盖
‑
145和电机盖
‑
144安装在短臂
‑
134两侧,隔垫安装于轴承和大臂
‑
84之间。
[0049]
所述小臂部分包括:小臂关节电机
‑
126、小臂
‑
83、轴承盖
‑
145、传动轴3
‑
86、电机盖
‑
144、隔垫;小臂关节电机
‑
126和传动轴3
‑
86安装在小臂
‑
83与大臂
‑
84交界圆处,通过电机轴连接,轴承盖
‑
145和电机盖
‑
144安装在小臂
‑
83两侧,隔垫安装于轴承和小臂
‑
83之间。
[0050]
所述腕部分包括:腕关节电机
‑
79、轴套、法兰
‑
12,轴承座
‑
38、滑套
‑
12、传动盖
‑
34、小盖
‑
37、箱体
‑
16;腕关节电机
‑
79安装在小臂
‑
83内部,与法兰相连接;传动盖
‑
34与腕关节电机
‑
79轴相连,传递扭矩;传动轴与轴承座
‑
38相连,同时轴承座
‑
38与箱体
‑
16相连;使得电机转动能够带动箱体
‑
16及爪部
‑
1一并发生转动。
[0051]
所述爪部分包括:爪关节电机
‑
17、滑套
‑
12、t型丝杆
‑
33、法兰、拨块
‑
11、小拨块
‑
9、推杆
‑
8、导套、支架
‑
6、隔套、销轴
‑
3、连杆
‑
5、爪部
‑
1;t型丝杆
‑
33与电机轴相连接,传递扭矩;爪关节电机
‑
17带动t型丝杆
‑
33旋转,带动拨块
‑
11沿螺纹向上下运动;小拨块
‑
9固定在拨块
‑
11一侧凹口处,另一侧凸出部分卡在推杆
‑
8凹口处,使得拨块
‑
11能够带动推杆
‑
8沿轴向运动;增加滑套
‑
12对推杆
‑
8进行限位,使其只能在支架
‑
6内部沿轴向进行运动;销轴
‑
3安装在推杆
‑
8另一侧,沿支架
‑
6开孔进行上下运动,带动其上连杆
‑
5转动;连杆
‑
5一端与爪部
‑
1相连,另一端同爪部
‑
1一角一同连接在销轴
‑
3上,连杆
‑
5发生运动时,自然带动爪部
‑
1产生张开和闭合运动。
[0052]
如图3所示为耦合因子求解示意图。水下无人艇
‑
双机械臂系统在机械臂运动时,该系统动力学耦合效应对水下无人艇母体位姿产生耦合扰动,由于系统作业目标为控制机械臂精准抓取水下目标物,因此该扰动引起的机械臂末端执行机构位姿波动程度是评价该系统动力学耦合效应的关键要素。设水下无人艇母体位置及姿态改变造成的机械臂末端执行机构位置变化分别为δ
m,l
及δ
m,a
。如图4所示,考虑l
m
可代表机械臂工作空间大小,则系统动力学耦合因子可定义为:
[0053][0054][0055]
对于平动耦合因子而言,水下无人艇母体位置变化等价映射至机械臂末端执行器位置变化,因此δ
m,l
=δ
linear
,可得平动耦合因子定义式:
[0056][0057]
对于转动耦合因子而言,水下无人艇母体姿态角变化与机械臂末端执行器位置变
化映射关系如下:
[0058][0059]
式中,l表示水下无人艇母体坐标系原点到机械臂末端执行器的距离。系数c的定义式为:
[0060][0061]
由于构成封闭多边形,因此c的取值与机械臂关节构型有关,其取值范围为(0,1),因此,可得转动耦合因子定义式为:
[0062][0063]
本实施例采用权利要求5所提出的试验方法2进行耦合效应评价试验。首先,水下无人艇
‑
双机械臂系统以2.5kn的航速匀速前进,无人艇初始深度设置为10m,总试验时间持续100s。当试验进行到30s时,双机械臂开始运动,并在试验进行到60s时双机械臂到达目标关节构型,双机械臂动作相同,如下表所示:
[0064]
表2机械臂动作
[0065][0066]
无人艇初始长度取l
v
=8.534m,在此基础上改变无人艇尺度,分别进行仿真试验,得到以下试验结果:
[0067]
表3耦合效应试验结果
[0068][0069]
其中,部分试验中无人艇位姿变化细节如图5所示。
[0070]
该试验条件下,艇
‑
双机械臂尺度比与系统耦合效应映射关系曲线如图6所示。可看到,当艇
‑
双机械臂尺度比小于10时,系统耦合效应随艇
‑
双机械臂尺度比增大急剧减弱,当艇
‑
双机械臂尺度比大于10时,系统耦合效应随尺度比增大所减弱的幅度较小,当艇
‑
双机械臂尺度比大于20时,耦合影响几乎可忽略不计,但此时艇相对于双机械臂而言尺度过大,不利于双机械臂进行水下作业。在该实施例条件下,规定最大许可耦合效应为χ=12,最大许可艇
‑
双机械臂尺度比为10,则如图6所示,可划定艇
‑
双机械臂尺度比优化区间。
[0071]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

