1.本实用新型属于混凝土测试技术领域,尤其涉及一种升降台式潮汐模拟装置。
背景技术:
2.目前,干湿循环实验是模拟海洋潮汐区混凝土氯离子扩散的主要手段。现有技术的海水模拟检测设备中,通过调节模拟箱注入水量与排出水量的比例,实现控制模拟箱中液面高度的上升或下降,以模仿混凝土样本浸没于海水中,并随海面涨潮、退潮过程发生的腐蚀性变化。但上述方案通过管道及阀门配合进行流量控制,注入/排出模拟箱的液体为海水或人工海水,会使管道、阀门及水泵均受到严重的侵蚀,降低管道、阀门及水泵的使用寿命,在高频率的实验中设备损耗极大。
3.并且,在通过管道注入/排出海水时,受管道流量限制,模拟箱内的液面上升/下降的变化速率偏低,无法模拟海浪瞬间淹没混凝土样本又快速消退的效果。使得模拟箱中混凝土样本受检测环境与实际环境不符,造成检测信息误差较大的问题。
技术实现要素:
4.本实用新型的目的在于,在模拟箱中注入足够量的实验用海水后,无需高频率使用管道、阀门及水泵进行海水注入/排出改变液面高度来模拟潮汐效果,避免管道和阀门被海水侵蚀。通过升降台结构抬升/沉降混凝土样本改变混凝土样本浸入海水中的深度,以模拟潮汐环境对混凝土样本的浸泡效果,从而检测混凝土样本受侵蚀的数据。升降台结构的抬升/沉降速度可调,能够完美模拟风浪环境下混凝土样本被瞬间淹没或露出水面的效果,模拟效果更接近实际环境。
5.本实用新型是通过以下技术方案实现的:
6.一种升降台式潮汐模拟装置,包括盛装有海水的模拟箱和升降台;所述升降台包括固定于所述模拟箱上方的基座、设置于所述模拟箱内腔中用于承载混凝土样本的承托机构、以及两端分别连接基座与承托机构的伸缩机构;所述伸缩机构通过伸缩运动带动承托机构浸入海水或脱离海水。
7.通过上述方案,本实用新型至少得到以下技术效果:
8.模拟箱中预先存储海水,将待测的混凝土样本固定于承托机构中,承托机构在伸缩机构的带动下进行升降运动,使混凝土样本抬升脱离海水或沉降浸入海水中。通过伸缩机构的伸缩量控制混凝土样本浸入海水中的深度,以模拟潮汐环境下,涨潮、退潮对混凝土建筑的浸泡效果。通过控制伸缩机构的伸长或收缩的速度,来控制海水淹没混凝土样本的速度或混凝土样本脱离海水的速度,以模拟伴随有风浪时,海浪产生的液面快速上下浮动对混凝土产生的浸泡冲刷效果。
9.该模拟装置舍弃通过管道注入/排出海水控制模拟箱内液面高低变化的方式,避免了管道长时间受到海水浸泡而锈蚀的问题。同时解决了由于管道流量上限不足,使液面变动缓慢,无法模拟风浪环境下液面快速上下浮动效果的问题,能够更为逼真还原海洋环
境,减少该种控制变量检测方法中的变量,使检测结果更为精准。
10.优选的,所述伸缩机构包括安装于基座上的导轨、齿轮组件、以及滑动组件;所述齿轮组件包括安装于基座上的伺服电机和设置于伺服电机输出端的主齿轮;所述滑动组件包括与所述导轨滑动连接的滑竿和固定于所述滑竿表面且沿滑竿长度方向设置的齿条;所述主齿轮与齿条啮合连接,用于带动滑竿沿导轨滑动;所述滑竿的底端与承托机构连接。
11.导轨用于作为滑竿的支撑结构并限定滑竿的滑动方向,使滑竿在主齿轮的带动下沿导轨往复滑动,实现带动承托机构抬升或沉降的效果。
12.伺服电机提供主齿轮转动所需的动力源,且伺服电机的为双向交流电机,可正向转动或反向转动,带动主齿轮瞬时准转动或逆时针转动。
13.由于主齿轮与滑竿上的齿条啮合配合,伺服电机驱动主齿轮顺时针转动,滑竿沿导轨向上方运动,承托机构抬升;伺服电机驱动主齿轮逆时针转动,滑竿沿导轨向下方运动,承托机构沉降。或,伺服电机驱动主齿轮顺时针转动时,滑竿沿导轨向下方运动,承托机构沉降;伺服电机驱动主齿轮逆时针转动时,滑竿沿导轨向上方运动,承托机构抬升。或,当伺服电机停止运行时,主齿轮与齿条啮合起到限制滑竿移动的效果,将承托机构浸入海水中的深度固定。
14.优选的,所述齿轮组件还包括副齿轮;所述副齿轮轴接于基座且所述副齿轮与所述齿条啮合。
15.滑动组件用于带动承托机构上升或下降,承托机构上还放置有混凝土样本,使得滑动组件的载荷较大,仅通过主齿轮与滑竿的齿条相互啮合承担抬升/沉降所需的载荷量,会造成主齿轮与齿条之间严重挤压磨损,甚至发生变形或断齿。因此在主齿轮的基础上,增加副齿轮分担主齿轮的负载量。
16.优选的,所述主齿轮为齿数残缺的不完全齿轮;所述主齿轮的轮齿与齿条的凸齿啮合并与副齿轮脱离接触,用以推动滑竿上升/下降;所述主齿轮的轮齿与副齿轮的轮齿啮合并与齿条脱离接触,用以推动滑竿下降/上升。
17.所述主齿轮与副齿轮配合构成不完全齿轮机构,用以间歇性控制滑动组件的运动轨迹。主齿轮的轮齿不同时与齿条的凸齿和副齿轮的轮齿啮合,避免卡齿故障。
18.伺服电机保持单向转动,主齿轮的轮齿与齿条的凸齿啮合推动与齿条连接的滑竿沿导轨向上或向下单向滑动,滑竿带动承托机构上升或下降;此时主齿轮与副齿轮之间仅存在副齿轮的轮齿,主齿轮的齿根圆周表面光滑不与副齿轮接触;副齿轮在齿条运动的带动下从动转动。
19.伺服电机继续保持单向转动不变,主齿轮的轮齿与副齿轮的轮齿相互啮合推动副齿轮转动,副齿轮的作用等同于惰性齿轮,将主动齿轮输出的转动方向逆转反向并传输至齿条,使与齿条连接的滑竿沿导轨向下或向上单向滑动,滑竿带动承托机构下降或上升;此时主齿轮与齿条之间仅存在齿条的凸齿,主齿轮的齿根圆周表面光滑不与齿条接触。
20.综上所述,主齿轮转动一周实现一个承托机构升降的循环,仅需启动伺服电机或关闭伺服电机控制该装置的启动或停止,模拟潮汐的过程可全自动实现。
21.优选的,所述齿轮组件还包括安装于基座上的离合器;所述副齿轮轴毂连接于离合器的齿轮轴;所述离合器用于调节副齿轮的位置,使副齿轮与主齿轮啮合或与主齿轮脱离接触。
22.主齿轮与副齿轮有三种相对位置关系:
23.第一种关系为副齿轮与主齿轮不接触,则副齿轮作为滑竿的另一支撑点,通过两点固定一条直线的原理,主齿轮和副齿轮作为限定滑竿滑动方向的两个滚动支撑点存在。
24.第二种关系为副齿轮与主齿轮啮合且二者均与齿条啮合,由于啮合后副齿轮的转动方向与主齿轮的转动方向相反,二者施加于齿条上的作用力相互抵消,滑竿无法移动,实现定位效果。
25.第三种关系为副齿轮作为主齿轮与齿条之间的连接媒介,主齿轮、副齿轮和齿条依次啮合,副齿轮作为惰性齿轮用于改变主齿轮传递至齿条上的运行方向,实现不改变电机运转方向的情况下,通过副齿轮实现滑竿的反向运动效果。
26.本方案中的离合器为齿轮离合器;用于调节副齿轮的位置,以实现改变主动齿轮、副齿轮及齿条三者之间的配合关系。齿轮离合器的种类繁多,基本结构均包括有用于安装齿轮的齿轮轴和用于调节位置的齿轮组结构、伸缩结构或滑动结构等,能够实现调节副齿轮位置即可,在此不做赘述。
27.优选的,所述导轨的长度方向与水平面的夹角为α,0
°
<α<180
°
。
28.导轨的摆设角度会对承托机构的升降效率产生影响。导轨越接近90
°
的垂直于水平面状态时,滑动组件沿滑轨所运行的距离越接近于承托机构被抬升/沉降的高度。导轨越接近0
°
或180
°
的平行于水平状态时,滑动组件沿滑轨所运行的距离所能带动承托机构被抬升/沉降的高度越小。
29.由于该装置必须满足使承托机构载着混凝土样本在模拟箱液面中升降运动,因此导轨不可水平设置,因此α不可等于0
°
或180
°
。
30.优选的,所述承托机构为水平设置的承托板。
31.承托机构用于承载混凝土样本,为使混凝土样本能够最大限度地与模拟箱中的海水接触,还原混凝土结构浸泡在海水中的状态,应最大限度地减少承托机构与混凝土样本的接触面积。因此,采用承托板承托的方式或吊装的方式均可。然而,由于海水对混凝土样本浸泡腐蚀会使混凝土结构强度发生变化,需要尽量还原混凝土结构在海中的受力情况,吊装的方式会使混凝土样本受到向上的拉力,与实际环境中混凝土结构受到地面或海床的支撑力形式不相符,易造成检测误差。因此,承托机构最优方案为承托板结构。
32.优选的,所述承托板开设有若干减阻孔;和/或
33.所述承托板的顶面设置有防滑层。
34.承托板在抬升/沉降过程中,板面会拍击水面,水面对承托板施加强烈的反作用力,阻碍承托板的运动。为降低承托板运动所受的阻力,在承托板上开始设若干减阻孔。减阻孔可容受到挤压的海水穿过,破坏承托板拍击水面时产生的张力面以削弱水面对承托板施加的反作用力。从减少承托板运动过程中的功率损耗,同时减弱承托板在拍击水面受到反作用力时产生的震动效果。
35.为避免混凝土样本在承托板上滑动甚至滑落,导致实验数据受到影响,在承托板与混凝土样本接触的表面设置防滑层,通过增大混凝土样本与承托板之间的摩擦力避免混凝土样本滑动或滑落。
36.优选的,所述伸缩机构还包括伸缩气缸;所述伸缩气缸固定安装于基座,其伸缩端与承托机构连接。
37.伸缩机构还可以采用伸缩气缸的方案,伸缩气缸的缸体部分固定安装于基座,伸缩端与承托机构连接。通过伸缩气缸的伸缩运动,伸缩端带动承托机构在模拟箱中抬升/沉降。
38.优选的,所述模拟箱联通有注水管道和排水管道;两管道均安装有流量阀。
39.模拟箱安装注水管道和排水管道,便于模拟箱中海水的注入或排出。两管道上的流量阀用于控制管道的通断以及注入/排出海水的速度。
附图说明
40.图1为本实用新型在一实施例中提供的一种升降台式潮汐模拟装置主视结构示意图。
41.图2为本实用新型在一实施例中提供的一种升降台式潮汐模拟装置侧视结构示意图。
42.图3为本实用新型在一实施例中提供的一种升降台式潮汐模拟装置采用伸缩气缸方案的结构示意图。
43.图4为本实用新型在一实施例中提供的承托机构结构示意图。
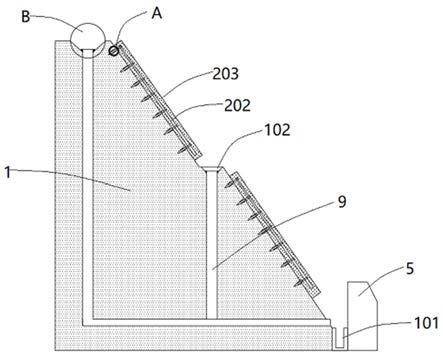
44.图5为本实用新型在一实施例中提供的模拟箱结构示意图。
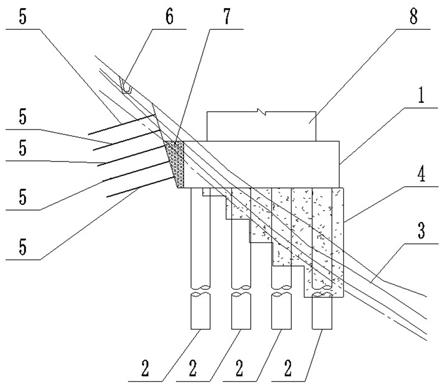
45.图6为本实用新型在一实施例中提供的一种升降台式潮汐模拟装置装配有不完全齿轮机构方案的主视结构示意图。
46.图例:
47.1模拟箱;2升降台;
48.11注水管道;12排水管道;13流量阀;
49.21基座;22承托机构;23伸缩机构;
50.221承托板;222减阻孔;223防滑层;
51.231导轨;232齿轮组件;233滑动组件;234伸缩气缸;
52.2321伺服电机;2322主齿轮;2323副齿轮;2324离合器;
53.2331滑竿;2332齿条。
具体实施方式
54.下面结合附图和实施例对本实用新型作进一步说明。
55.请参阅图1
‑
图6。
56.如图1和图2所示,一种升降台式潮汐模拟装置,包括盛装有海水的模拟箱1和升降台2;所述升降台2包括固定于所述模拟箱1上方的基座21、设置于所述模拟箱1内腔中用于承载混凝土样本的承托机构22、以及两端分别连接基座21与承托机构22的伸缩机构23;所述伸缩机构23通过伸缩运动带动承托机构22浸入海水或脱离海水。
57.通过上述方案,本实用新型至少得到以下技术效果:
58.模拟箱1中预先存储海水,将待测的混凝土样本固定于承托机构22中,承托机构22在伸缩机构23的带动下进行升降运动,使混凝土样本抬升脱离海水或沉降浸入海水中。通过伸缩机构23的伸缩量控制混凝土样本浸入海水中的深度,以模拟潮汐环境下,涨潮、退潮对混凝土建筑的浸泡效果。通过控制伸缩机构23的伸长或收缩的速度,来控制海水淹没混
凝土样本的速度或混凝土样本脱离海水的速度,以模拟伴随有风浪时,海浪产生的液面快速上下浮动对混凝土产生的浸泡冲刷效果。
59.该模拟装置舍弃通过管道注入/排出海水控制模拟箱1内液面高低变化的方式,避免了管道长时间受到海水浸泡而锈蚀的问题。同时解决了由于管道流量上限不足,使液面变动缓慢,无法模拟风浪环境下液面快速上下浮动效果的问题,能够更为逼真还原海洋环境,减少该种控制变量检测方法中的变量,使检测结果更为精准。
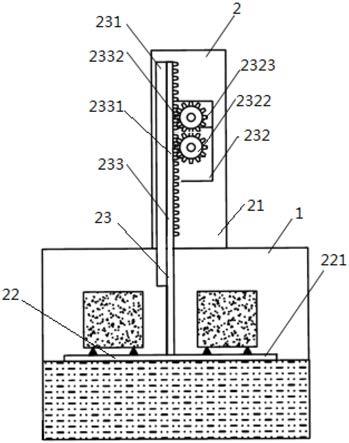
60.基于上述方案,如图1和图2所示,伸缩机构23用于带动承托机构22运动,使放置于承托机构22上的混凝土样本下降浸入模拟箱1内的海水中,或使混凝土样本上升脱离海水;为便于调节混凝土样本浸入海水中的深度和速度,使伸缩机构23的伸缩长度和伸缩位置均可控制,以模拟涨潮、落潮的环境,在一实施例中,所述伸缩机构23包括安装于基座21上的导轨231、齿轮组件232、以及滑动组件233;所述齿轮组件232包括安装于基座21上的伺服电机2321和设置于伺服电机2321输出端的主齿轮2322;所述滑动组件233包括与所述导轨231滑动连接的滑竿2331和固定于所述滑竿2331表面且沿滑竿2331长度方向设置的齿条2332;所述主齿轮2322与齿条2332啮合连接,用于带动滑竿2331沿导轨231滑动;所述滑竿2331的底端与承托机构22连接。
61.导轨231用于作为滑竿2331的支撑结构并限定滑竿2331的滑动方向,使滑竿2331在主齿轮2322的带动下沿导轨231往复滑动,实现带动承托机构22抬升或沉降的效果。
62.伺服电机2321提供主齿轮2322转动所需的动力源,且伺服电机2321的为双向交流电机,可正向转动或反向转动,带动主齿轮2322瞬时准转动或逆时针转动。
63.由于主齿轮2322与滑竿2331上的齿条2332啮合配合,伺服电机2321驱动主齿轮2322顺时针转动,滑竿2331沿导轨231向上方运动,承托机构22抬升;伺服电机2321驱动主齿轮2322逆时针转动,滑竿2331沿导轨231向下方运动,承托机构22沉降。或,伺服电机2321驱动主齿轮2322顺时针转动时,滑竿2331沿导轨231向下方运动,承托机构22沉降;伺服电机2321驱动主齿轮2322逆时针转动时,滑竿2331沿导轨231向上方运动,承托机构22抬升。或,当伺服电机2321停止运行时,主齿轮2322与齿条2332啮合起到限制滑竿2331移动的效果,将承托机构22浸入海水中的深度固定。
64.基于上述方案,如图1和图2所示,滑动组件233用于带动承托机构22上升或下降,承托机构22上还放置有混凝土样本,使得滑动组件233的载荷较大,仅通过主齿轮2322与滑竿2331的齿条2332相互啮合承担抬升/沉降所需的载荷量,会造成主齿轮2322与齿条2332之间严重挤压磨损,甚至发生变形或断齿。因此,在一实施例中,所述齿轮组件232还包括副齿轮2323;所述副齿轮2323轴接于基座21且所述副齿轮2323与所述齿条2332啮合。在主齿轮2322的基础上,增加副齿轮2323分担主齿轮2322的负载量。
65.基于上述方案,如图6所示,在不改变伺服电机2321输出的转动方向前提下,通过改进主齿轮2322结构并与副齿轮2323配合,实现全自动模拟潮汐的效果,在一实施例中,所述主齿轮2322为齿数残缺的不完全齿轮;所述主齿轮2322的轮齿与齿条2332的凸齿啮合并与副齿2323轮脱离接触,用以推动滑竿2331上升/下降;所述主齿轮2322的轮齿与副齿轮2323的轮齿啮合并与齿条脱离接触,用以推动滑竿2331下降/上升。
66.所述主齿轮2322与副齿轮2323配合构成不完全齿轮机构,用以间歇性控制滑动组件233的运动轨迹。主齿轮2322的轮齿不同时与齿条2332的凸齿和副齿轮2323的轮齿啮合,
避免卡齿故障。
67.伺服电机2321保持单向转动,主齿轮2322的轮齿与齿条2332的凸齿啮合推动与齿条2332连接的滑竿2331沿导轨231向上或向下单向滑动,滑竿2331带动承托机构22上升或下降;此时主齿轮2322与副齿轮2323之间仅存在副齿轮2323的轮齿,主齿轮2322的齿根圆周表面光滑不与副齿轮2323接触;副齿轮2323在齿条2332运动的带动下从动转动。
68.伺服电机2321继续保持单向转动不变,主齿轮2322的轮齿与副齿轮2323的轮齿相互啮合推动副齿轮2323转动,副齿轮2323的作用等同于惰性齿轮,将主动齿2322轮输出的转动方向逆转反向并传输至齿条2332,使与齿条2332连接的滑竿2331沿导轨231向下或向上单向滑动,滑竿2331带动承托机构22下降或上升;此时主齿轮2322与齿条2332之间仅存在齿条2332的凸齿,主齿轮2322的齿根圆周表面光滑不与齿条2332接触。
69.综上所述,主齿轮2322转动一周实现一个承托机构22升降的循环,仅需启动伺服电机2321或关闭伺服电机2321控制该装置的启动或停止,模拟潮汐的过程可全自动实现。
70.基于上述方案,如图1和图2所示,为使齿轮组件232与滑动组件233相互配合可实现伸缩滑动的效果,同时还能够在任意位置限定滑动组件233的位置,在一实施例中,所述齿轮组件232还包括安装于基座21上的离合器2324;所述副齿轮2323轴毂连接于离合器2324的齿轮轴;所述离合器2324用于调节副齿轮2323的位置,使副齿轮2323与主齿轮2322啮合或与主齿轮2322脱离接触。
71.主齿轮2322与副齿轮2323有三种相对位置关系:
72.第一种关系为副齿轮2323与主齿轮2322不接触,则副齿轮2323作为滑竿2331的另一支撑点,通过两点固定一条直线的原理,主齿轮2322和副齿轮2323作为限定滑竿2331滑动方向的两个滚动支撑点存在。
73.第二种关系为副齿轮2323与主齿轮2322啮合且二者均与齿条2332啮合,由于啮合后副齿轮2323的转动方向与主齿轮2322的转动方向相反,二者施加于齿条2332上的作用力相互抵消,滑竿2331无法移动,实现定位效果。
74.第三种关系为副齿轮2323作为主齿轮2322与齿条2332之间的连接媒介,主齿轮2322、副齿轮2323和齿条2332依次啮合,副齿轮2323作为惰性齿轮用于改变主齿轮2322传递至齿条2332上的运行方向,实现不改变电机运转方向的情况下,通过副齿轮2323实现滑竿2331的反向运动效果。
75.本方案中的离合器2324为齿轮离合器2324;用于调节副齿轮2323的位置,以实现改变主动齿轮、副齿轮2323及齿条2332三者之间的配合关系。齿轮离合器2324的种类繁多,其基本结构均包括有用于安装齿轮的齿轮轴和用于调节位置的齿轮组结构、伸缩结构或滑动结构等,能够实现调节副齿轮2323位置即可,在此不做赘述。
76.基于上述方案,如图1和图2所示,滑动组件233的伸缩方向受导轨231设置的方向限制,导轨231若水平设置则无法实现承托机构22随滑动组件233的滑动而升降的效果;因此,在一实施例中,所述导轨231的长度方向与水平面的夹角为α,0
°
<α<180
°
。
77.导轨231的摆设角度会对承托机构22的升降效率产生影响。导轨231越接近90
°
的垂直于水平面状态时,滑动组件233沿滑轨所运行的距离越接近于承托机构22被抬升/沉降的高度。导轨231越接近0
°
或180
°
的平行于水平状态时,滑动组件233沿滑轨所运行的距离所能带动承托机构22被抬升/沉降的高度越小。
78.由于该装置必须满足使承托机构22载着混凝土样本在模拟箱1液面中升降运动,因此导轨231不可水平设置,因此α不可等于0
°
或180
°
。
79.基于上述方案,如图1、图2、图3和图4所示,承托机构22用于承载混凝土样本,为使混凝土样本能够最大限度地与模拟箱1中的海水接触,还原混凝土结构浸泡在海水中的状态,应最大限度地减少承托机构22与混凝土样本的接触面积。因此,在一实施例中,所述承托机构22为水平设置的承托板221。
80.采用承托板221承托的方式或吊装的方式均可。然而,由于海水对混凝土样本浸泡腐蚀会使混凝土结构强度发生变化,需要尽量还原混凝土结构在海中的受力情况,吊装的方式会使混凝土样本受到向上的拉力,与实际环境中混凝土结构受到地面或海床的支撑力形式不相符,易造成检测误差。因此,承托机构22最优方案为承托板221结构。
81.基于上述方案,如图4所示,承托板221在抬升/沉降过程中,板面会拍击水面,水面对承托板221施加强烈的反作用力,阻碍承托板221的运动;为降低承托板221运动所受的阻力,在一实施例中,所述承托板221开设有若干减阻孔222。
82.在承托板221上开始设若干减阻孔222。减阻孔222可容受到挤压的海水穿过,破坏承托板221拍击水面时产生的张力面以削弱水面对承托板221施加的反作用力。从减少承托板221运动过程中的功率损耗,同时减弱承托板221在拍击水面受到反作用力时产生的震动效果。
83.基于上述方案,如图4所示,为避免混凝土样本在承托板221上滑动甚至滑落,导致实验数据受到影响,在一实施例中,所述承托板221的顶面设置有防滑层223。
84.在承托板221与混凝土样本接触的表面设置防滑层223,通过增大混凝土样本与承托板221之间的摩擦力避免混凝土样本滑动或滑落。
85.基于上述方案,如图3所示,还提出另一种伸缩机构23的方案,在一实施例中,所述伸缩机构23还包括伸缩气缸234;所述伸缩气缸234固定安装于基座21,其伸缩端与承托机构22连接。
86.伸缩机构23还可以采用伸缩气缸234的方案,伸缩气缸234的缸体部分固定安装于基座21,伸缩端与承托机构22连接。通过伸缩气缸234的伸缩运动,伸缩端带动承托机构22在模拟箱1中抬升/沉降。
87.基于上述方案,如图5所示,为便于模拟箱1的操作管理,实现快速注水和排水清理的效果;在一实施例中,所述模拟箱1联通有注水管道11和排水管道12;两管道均安装有流量阀13。
88.模拟箱1安装注水管道11和排水管道12,便于模拟箱1中海水的注入或排出。两管道上的流量阀13用于控制管道的通断以及注入/排出海水的速度。
89.本实用新型并不局限于上述实施方式,如果对本实用新型的各种改动或变型不脱离本实用新型的精神和范围,倘若这些改动和变型属于本实用新型的权利要求和等同技术范围之内,则本实用新型也意图包含这些改动和变动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。