技术特征:
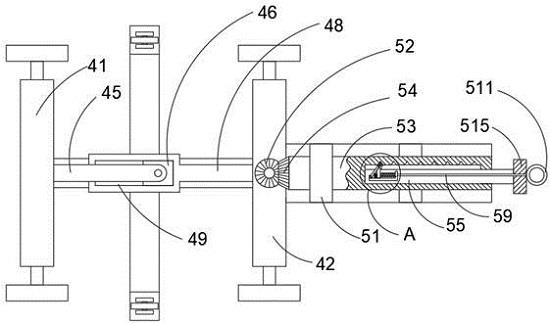
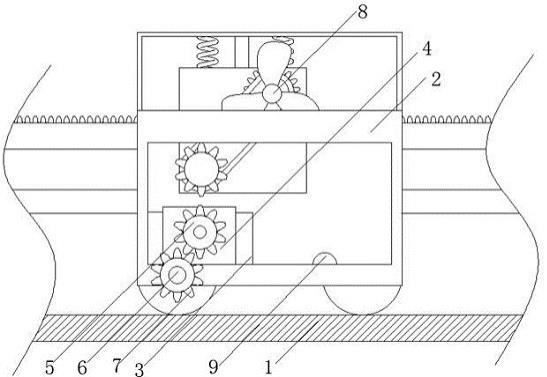
1.一种仓储货物自动化搬运装置,包括带座型横向支撑机构(1),其特征在于:所述带座型横向支撑机构(1)的顶部安装有用于操控的支撑型搬运手臂机构(2),所述支撑型搬运手臂机构(2)的一端连接有用于定位的定位型悬臂机构(3),所述支撑型搬运手臂机构(2)的一端通过定位型悬臂机构(3)连接有定位型货运推车机构(4),所述支撑型搬运手臂机构(2)包括中央控制系统、人机交互界面、机械臂控制模块、寻迹模块、超声波测距模块、摄像头模块、传感器模块以及无线通信模块,所述定位型悬臂机构(3)与定位型货运推车机构(4)包括寻迹模块终端、超声波测距模块终端、摄像头模块终端、传感器模块终端以及无线通信模块终端,所述人机交互界面连接中央控制系统,所述中央控制系统包括stm32核心控制模块,所述无线通信模块包括无线发射模块以及无线接受模块,所述定位型货运推车机构(4)上配置包含有无人车id和rf信道信息并通过无线发射模块发送至位于中央控制系统上的无线接收模块,中央控制系统通过设定程序控制位于无人车上的机械臂模块实现仓储货物的自动化搬运,其中,寻迹模块、超声波测距模块、摄像头模块用于将测定数据发送至中央控制系统进行分析,经分析后经无线通信模块达到定位型货运推车机构(4),并驱动定位型货运推车机构(4)将仓储货物搬运至临时仓库。2.根据权利要求1所述的一种仓储货物自动化搬运装置,其特征在于:所述带座型横向支撑机构(1)包括定位型支撑安装板(101),所述定位型支撑安装板(101)的底部安装有多个防滑型定位安装座(102),所述定位型支撑安装板(101)的顶部安装有多个限位型固定悬臂(103)。3.根据权利要求2所述的一种仓储货物自动化搬运装置,其特征在于:所述支撑型搬运手臂机构(2)包括第一多节段型操控手臂(21),所述第一多节段型操控手臂(21)的一端连接有第二多节段型操控手臂(22),所述第二多节段型操控手臂(22)的一端连接有第二多节段型操控手臂(23),所述第一多节段型操控手臂(21)与第二多节段型操控手臂(22)之间均通过驱动的方式连接有第一电控型调节关节(24),所述第二多节段型操控手臂(22)与第二多节段型操控手臂(23)之间均通过驱动的方式连接有第二电控型调节关节(25),所述第一多节段型操控手臂(21)、第二多节段型操控手臂(22)与第二多节段型操控手臂(23)之间均连接有多个呈空心管套状设置的预制型导线框架、(26),且预制型导线框架、(26)的外壁开设有一条贯穿的横槽,所述第二多节段型操控手臂(23)的一端安装有可操控性搬运抓手机构(27)。4.根据权利要求3所述的一种仓储货物自动化搬运装置,其特征在于:所述支撑型搬运手臂机构(2)由铝合金架构成,所述支撑型搬运手臂机构(2)的机械臂用过机械臂控制模块可抓取物料跟随系统移动,所述机械臂模块与摄像头模块相连,并受其控制,所述stm32核心控制模块块通过stm32f103vct6芯片来组成单片机的最小控制系统并提供相应接口,完成对整个搬运系统的控制与调度。5.根据权利要求4所述的一种仓储货物自动化搬运装置,其特征在于:所述定位型悬臂机构(3)包括第一折弯型定位手臂(31),所述第一折弯型定位手臂(31)的一侧安装有第一可调节式伸缩管段(32),所述第一可调节式伸缩管段(32)的一侧安装有第二可调节式伸缩管段(33),所述第二可调节式伸缩管段(33)的一端安装有折弯型衔接管段(34),所述折弯型衔接管段(34)的一端连接有第三可调节式伸缩管段(35),所述第三可调节式伸缩管段(35)的一端连接有弯钩型悬挂臂(36),所述弯钩型悬挂臂(36)远离第三可调节式伸缩管段
(35)的一端安装有限位型压力触感模块(37)。6.根据权利要求5所述的一种仓储货物自动化搬运装置,其特征在于:所述定位型货运推车机构(4)包括货运用推车框架(41),所述货运用推车框架(41)的底部安装有多个定位型万向脚轮(42),所述货运用推车框架(41)的外壁边缘安装有承托型支撑护边条(43),所述货运用推车框架(41)与承托型支撑护边条(43)之间安装有多个限位型支撑悬臂(44),所述定位型万向脚轮(42)与货运用推车框架(41)之间安装有可拆卸式连接座(45),所述货运用推车框架(41)的底部安装有多个悬置支撑框架(46)。7.根据权利要求6所述的一种仓储货物自动化搬运装置,其特征在于:所述摄像头模块采用openmv摄像头模块,openmv摄像头模块用于从众多不同颜色、不同形状的物料中,选取指定形状与颜色的物料;openmv摄像头模块采用openmvm7摄像头,该模块与stm32核心控制模块上的pe4、pe5接口连接;当openmv摄像头模块识别成功后,通过输出模块的高低电平反馈给stm32核心控制模块;所述openmv摄像头模块与超声波测距模块相配合,判断搬运系统与物料之间的距离与方位,并将数据传递至机械臂模块进行准确抓取。8.根据权利要求7所述的一种仓储货物自动化搬运装置,其特征在于:所述超声波测距模块采用hc
‑
sr04超声波测距模块,用于判断前方是否有障碍物,该模块与stm32核心控制模块上的pc12和pc13接口连接,其中pc13用于触发超声波检测,pc12用于计算回波时间,从而计算出与目标点间的距离。9.根据权利要求8所述的一种仓储货物自动化搬运装置,其特征在于:所述传感器与stm32核心控制模块上的pe6接口连接,用于判断搬运系统是否到达指定的分拣点或卸货点。
技术总结
本发明公开了一种仓储货物自动化搬运装置,具体涉及仓储领域,包括带座型横向支撑机构,带座型横向支撑机构的顶部安装有用于操控的支撑型搬运手臂机构,支撑型搬运手臂机构的一端连接有用于定位的定位型悬臂机构,支撑型搬运手臂机构的一端通过定位型悬臂机构连接有定位型货运推车机构,支撑型搬运手臂机构包括中央控制系统、人机交互界面、机械臂控制模块、寻迹模块、超声波测距模块、摄像头模块、传感器模块以及无线通信模块。本发明通过颜色识别算法、边缘检测算法、特征点形状匹配算法等图像处理技术,提高了摄像头对物料的检测、识别和筛选的准确度,使得本发明对物料快速、准确、便捷、稳定的搬运。稳定的搬运。稳定的搬运。
技术研发人员:李冬菊
受保护的技术使用者:李冬菊
技术研发日:2021.06.02
技术公布日:2021/10/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。