1.本技术涉及电器设备领域,特别涉及一种洗衣机脱水方法及洗衣机。
背景技术:
2.随着人们生活水平的逐渐提高,洗衣机已经成为每家每户不可缺少的电器,洗衣机的脱水功能也越来越受到用户重视。
3.洗衣机通常通过转动洗衣机内筒,以对洗衣机负载进行脱水,但是,在洗衣机脱水的过程中,通常会产生较大噪音,影响客户体验。
技术实现要素:
4.本技术的一个目的在于解决现有技术中的洗衣机脱水时噪音大问题。
5.为解决上述问题,本技术提供了一种洗衣机脱水方法,所述方法包括:测量洗衣机外筒在洗衣机脱水过程中振动产生的位移;基于所述位移,确定所述洗衣机中的负载在洗衣机内筒中的偏心位置;获取所述负载在所述内筒中的偏心量;基于所述偏心位置和所述偏心量,确定目标转速;控制所述内筒以所述目标转速进行转动,以对所述负载进行脱水。
6.在本技术的另一个方面,提供了一种洗衣机,包括:洗衣机本体,包括箱体,设置在所述箱体中的外筒,设置在所述外筒内的内筒,以及控制所述内筒转动的控制器,所述内筒的筒底与所述外筒的筒底相连接;振动位移传感器,设置在所述外筒上,连接所述控制器;所述控制器配置为:测量洗衣机外筒在洗衣机脱水过程中振动产生的位移;基于所述位移,确定所述洗衣机中的负载在洗衣机内筒中的偏心位置;获取所述负载在所述内筒中的偏心量;基于所述偏心位置和所述偏心量,确定目标转速;控制所述内筒以所述目标转速进行转动,以对所述负载进行脱水。
7.在本技术的一个实施例中,基于前述方案,所述控制器配置为:测量所述外筒沿着所述外筒的径向方向振动产生的径向位移;测量所述外筒沿着所述外筒的轴向方向振动产生的轴向位移;比较所述径向位移和所述轴向位移,得到第一比较结果;基于所述第一比较结果,确定所述偏心位置。
8.在本技术的一个实施例中,基于前述方案,所述控制器配置为:测量所述外筒沿着所述外筒的径向方向振动产生的最大径向位移,作为所述径向位移;测量在所述外筒的径向方向达到所述最大径向位移时,所述外筒沿着所述外筒的轴向方向发生的位移,作为所述轴向位移。
9.在本技术的一个实施例中,基于前述方案,所述控制器配置为:测量所述外筒沿着所述外筒的径向方向振动产生的最大径向位移,作为所述径向位移;测量所述外筒沿着所述外筒的轴向方向振动产生的最大轴向位移,作为所述轴向位移。
10.在本技术的一个实施例中,基于前述方案,所述控制器配置为:若所述第一比较结果为,所述径向位移大于所述轴向位移,则确定所述偏心位置为所述内筒靠近位移测量位置的一端;若所述第一比较结果为,所述径向位移与所述轴向位移相近,则确定所述偏心位
置为所述内筒的中部;若所述第一比较结果为,所述径向位移小于所述轴向位移,则确定所述偏心位置为所述内筒远离所述位移测量位置的另一端。
11.在本技术的一个实施例中,基于前述方案,所述控制器配置为:若所述第一比较结果为,所述径向位移与所述轴向位移的比值大于第一设定比值,则确定所述偏心位置为所述内筒靠近位移测量位置的一端;若所述第一比较结果为,所述径向位移与所述轴向位移的比值小于第二设定比值,则确定所述偏心位置为所述内筒远离所述位移测量位置的另一端,其中,所述第二设定比值小于所述第一设定比值;若所述第一比较结果为,所述径向位移与所述轴向位移的比值小于所述第一设定比值且大于所述第二设定比值,则确定所述偏心位置为所述内筒的中部。
12.在本技术的一个实施例中,基于前述方案,所述控制器配置为:若所述第一比较结果为,所述径向位移与所述轴向位移的差值大于第一设定差值,则确定所述偏心位置为为所述内筒靠近位移测量位置的一端;若所述第一比较结果为,所述径向位移与所述轴向位移的差值小于第二设定差值,则确定所述偏心位置为为所述内筒远离所述位移测量位置的另一端,其中,所述第二设定差值小于所述第一设定差值;若所述第一比较结果为,所述径向位移与所述轴向位移的差值大于所述第一设定差值且小于所述第二设定差值,则确定所述偏心位置为所述内筒的中部。
13.在本技术的一个实施例中,基于前述方案,所述位移包括所述外筒沿着所述外筒的径向方向振动产生的径向位移,以及所述外筒沿着所述外筒的轴向方向振动产生的轴向位移,其中,所述径向位移包括平行于地面的平行径向位移、以及垂直于地面的垂直径向位移,所述控制器配置为:比较所述平行径向位移、所述平行径向位移以及所述轴向位移,得到第二比较结果;基于所述第二比较结果,确定所述偏心位置。
14.在本技术的一个实施例中,基于前述方案,所述控制器配置为:若所述第二比较结果为,所述平行径向位移大于所述垂直径向位移、或所述平行径向位移大于所述轴向位移,则确定所述偏心位置为所述内筒靠近位移测量位置的一端;若所述第二比较结果为,所述平行径向位移小于所述垂直径向位移、或所述平行径向位移小于所述轴向位移,则确定所述偏心位置为所述内筒远离所述位移测量位置的另一端;若所述第二比较结果为,所述平行径向位移接近所述垂直径向位移、或所述平行径向位移接近所述轴向位移,则确定所述偏心位置为所述内筒的中部。
15.由上述技术方案可知,本技术至少具有如下优点和积极效果:
16.本技术中提出的一种洗衣机脱水方法,包括测量洗衣机外筒在洗衣机脱水过程中振动产生的位移;基于位移,确定洗衣机中的负载在洗衣机内筒中的偏心位置;获取负载在内筒中的偏心量;基于偏心位置和偏心量,确定目标转速;控制内筒以目标转速进行转动,以对负载进行脱水,以尽量减小洗衣机脱水过程中外筒的位移,从而减少外筒和洗衣机外壳的碰撞,以实现降低洗衣机脱水过程中产生的噪音。
附图说明
17.图1示意性示出了根据本技术的一个实施例的洗衣机结构示意图;
18.图2示意性示出了根据本技术的一个实施例的偏心位置示意图;
19.图3示意性示出了根据本技术的一个实施例的洗衣机脱水方法流程图;
20.图4示意性示出了根据本技术的一个实施例的滚筒洗衣机脱水方法流程图;
21.图5示意性示出了根据本技术的一个实施例的确定偏心位置的流程图;
22.图6示意性示出了根据本技术的一个实施例的确定偏心位置的流程图。
具体实施方式
23.体现本技术特征与优点的典型实施方式将在以下的说明中详细叙述。应理解的是本技术能够在不同的实施方式上具有各种的变化,其皆不脱离本技术的范围,且其中的说明及图示在本质上是当作说明之用,而非用以限制本技术。
24.在本技术的一个实施例中,提供了一种洗衣机,包括洗衣机本体,如图1所示,图1示意性示出了根据本技术的一个实施例的洗衣机结构示意图,洗衣机本体可以包括窗口1,门封2,外筒3,内筒4,箱体5,吊簧7,电机8和减振器9。窗口1安装在箱体5上,并与洗衣机外筒3通过门封2连接,门封2可以是橡胶材料;外筒3位于箱体5内部,外筒3通过吊簧7和减振器9与箱体5连接;内筒4位于外筒3内部,并通过传动机构与电机8连接,传动机构的传动轴连接内筒4的筒底圆心,并且传动机构的传动轴连接外筒3的筒底圆心,内筒4的轴和外筒3的轴在一条直线上;振动传感器6设置在外筒3上,振动传感器6与控制器连接。控制器包括洗衣机主控装置及电机控制装置,洗衣机主控装置通过电机控制装置驱动洗衣机电机旋转,同时,外筒3的振动位移可以反馈至洗衣机主控装置,主控装置根据本技术的洗衣机脱水方法控制洗衣机转速,从而降低洗衣机振动噪音。
25.在本技术的一个实施例中,振动传感器6设置在外筒3外侧壁,以防止振动传感器6影响内筒4转动。
26.在本技术的一个实施例中,传动机构可以是位于外筒后侧的轴承结构,传动机构也用于为内筒提供刚度支撑,发明人发现,这种类似悬臂梁的结构,导致在同样偏心量的情况下,偏心量在洗衣机外筒远离传动机构的开口端产生比外筒靠近传动机构的封闭端更大的力矩,导致同样偏心量在靠近开口端的偏心位置比靠近封闭端的偏心位置,振动噪音更显著,即噪音和偏心位置、偏心量均有关,因此,本技术提供了一种洗衣机脱水方法,根据洗衣机的偏心位置和偏心量来调节内筒转速,以降低洗衣机脱水时的噪音。
27.在本技术的一个实施例中,当偏心位置为靠近开口端时,可以确定此时的偏心位置为前偏心;当偏心位置为靠近封闭端时,可以确定此时的偏心位置为后偏心;偏心位置除了前偏心和后偏心,还可以包括位于内筒中部的中偏心,如图2所示,图2示意性示出了根据本技术的一个实施例的偏心位置示意图,可以将外筒沿着平行于地面的平行径向位移用y表示,将外筒垂直于地面的垂直径向位移用z表示,将轴向位移用x表示。
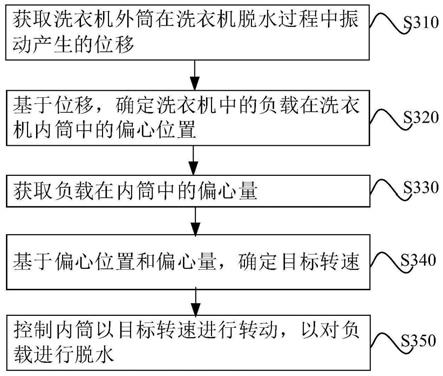
28.在本技术的一个实施例中,提供了一种洗衣机脱水方法如图3,图3示意性示出了根据本技术的一个实施例的洗衣机脱水方法流程图,洗衣机脱水方法的执行主体可以是洗衣机、洗衣机中的控制器、或洗衣机中的主控装置。
29.参照图3所示,该洗衣机脱水方法至少包括步骤s310至步骤s350,详细介绍如下:
30.在步骤s310中,测量洗衣机外筒在洗衣机脱水过程中振动产生的位移。
31.在本技术的一个实施例中,可以测量外筒沿着外筒的径向方向振动产生的径向位移;测量外筒沿着外筒的轴向方向振动产生的轴向位移。
32.在步骤s320中,基于位移,确定洗衣机中的负载在洗衣机内筒中的偏心位置。
33.在本技术的一个实施例中,可以比较径向位移和轴向位移,得到第一比较结果;基于第一比较结果,确定偏心位置,由于外筒的位移是内筒转动产生的,外筒在某个方向的位移能够体现内筒在某个方向的振动大小,因此,比较外筒在不同方向的位移,能够确定内筒的偏心位置。
34.在本技术的一个实施例中,若第一比较结果为,径向位移大于轴向位移,则可以确定偏心位置为内筒靠近位移测量位置的一端;若第一比较结果为,径向位移与轴向位移相近,则可以确定偏心位置为内筒的中部;若第一比较结果为,径向位移小于轴向位移,则可以确定偏心位置为内筒远离位移测量位置的另一端。
35.在该实施例中,当洗衣机脱水时,偏心位置内筒振动通常比其他位置更加剧烈,而振动剧烈时,由于传动机构的固定,外筒的径向振动通常大于轴向振动,因此,当位移测量位置处的径向位移大于轴向位移,则说明位移测量位置处靠近偏心位置,若位移测量位置靠近开口端,则可以确定偏心位置为前偏心;若位移测量位置靠近封闭端,则可以确定偏心位置为后偏心;若径向位移与轴向位移相近,则可以确定偏心位置为内筒中部;当位移测量位置处的径向位移小于轴向位移,则说明位移测量位置处远离偏心位置,若位移测量位置靠近开口端,则可以确定偏心位置为后偏心;若位移测量位置靠近封闭端,则可以确定偏心位置为前偏心。
36.在本技术的一个实施例中,若第一比较结果为,径向位移与轴向位移的比值大于第一设定比值,则确定偏心位置为内筒靠近位移测量位置的一端;若第一比较结果为,径向位移与轴向位移的比值小于第二设定比值,则确定偏心位置为内筒远离位移测量位置的另一端,其中,第二设定比值小于第一设定比;若第一比较结果为,径向位移与轴向位移的比值大于第一设定比值且小于第二设定比值,则确定偏心位置为内筒的中部。在该实施例中,第一设定比值与第二设定比值可以根据实际情况设定。
37.在本技术的一个实施例中,若第一比较结果为,径向位移与轴向位移的差值大于第一设定差值,则确定偏心位置为内筒靠近位移测量位置的一端;若第一比较结果为,径向位移与轴向位移的差值小于第二设定差值,则确定偏心位置为内筒远离位移测量位置的另一端,其中,第二设定差值小于第一设定差值;若第一比较结果为,径向位移与轴向位移的差值大于第一设定差值且小于第二设定差值,则确定偏心位置为内筒的中部。在该实施例中,第一设定差值与第二设定差值可以根据实际情况设定。
38.在本技术的一个实施例中,可以获取外筒在低转速区的位移,以确定外筒在低转速区的偏心位置,能够使内筒从确定偏心位置对应的较低转速后升高到目标转速即可,相比于从较高转速时确定偏心位置,内筒从低速升高到确定偏心位置对应的较高转速后再降低到目标转速的过程,简化了洗衣机的速度调节过程。
39.继续参照图3,在步骤s330中,获取负载在内筒中的偏心量。
40.在本技术的一个实施例中,可以根据洗衣机电机转速波动确定偏心量。可以是转速波动大,则偏心量大;转速波动小,则偏心量小。
41.在本技术的一个实施例中,可以根据外筒的位移确定偏心量。
42.在本技术的一个实施例中,可以在内筒以较低转速运行时负载的偏心量,当内筒提速时,偏心量基本不变,在较低转速时确定偏心量,能够使内筒从确定偏心量对应的较低转速后升高到目标转速即可,相比于从较高转速时确定偏心量,内筒从低速升高到确定偏
心量对应的较高转速后再降低到目标转速的过程,简化了洗衣机的速度调节过程。
43.在步骤s340中,基于偏心位置和偏心量,确定目标转速。
44.在本技术的一个实施例中,可以通过实验或经验,确定偏心位置、偏心量和目标转速对应关系,当获取偏心位置和偏心量后,通过查找对应关系,确定目标转速。以位移测量位置靠近内筒开口端为例,表1示意性示出了本技术一个不同转速设置对应不同位置的偏心量关系,当然,位移测量位置还可以设置在靠近内筒封闭端的位置。
45.表1不同转速设置对应不同位置的偏心量关系
[0046][0047]
在步骤s350中,控制内筒以目标转速进行转动,以对负载进行脱水。
[0048]
在图3的实施例中,通过测量洗衣机外筒在洗衣机脱水过程中振动产生的位移;基于位移,确定洗衣机中的负载在洗衣机内筒中的偏心位置;获取负载在内筒中的偏心量;基于偏心位置和偏心量,确定目标转速;控制内筒以目标转速进行转动,以对负载进行脱水,以尽量减小洗衣机脱水过程中外筒的位移,从而减少外筒和洗衣机外壳的碰撞,以实现降低洗衣机脱水过程中产生的噪音。
[0049]
在本技术的一个实施例中,在图3的步骤s310中,测量洗衣机外筒在洗衣机脱水过程中振动产生的位移的步骤中,可以测量外筒沿着外筒的径向方向振动产生的最大径向位移,作为径向位移;测量在外筒的径向方向达到最大径向位移时,外筒沿着外筒的轴向方向发生的位移,作为轴向位移,由于脱水过程中,径向位移通常大于轴向位移,因此根据最大径向位移确定的偏心位置通常是准确的偏心位置。
[0050]
在本技术的一个实施例中,在图3的步骤s310中,测量洗衣机外筒在洗衣机脱水过程中振动产生的位移的步骤中,可以测量外筒沿着外筒的径向方向振动产生的最大径向位移,作为径向位移;可以测量外筒沿着外筒的轴向方向振动产生的最大轴向位移,作为轴向位移,根据最大径向位移和最大轴向位移确定的偏心位置,更加准确。
[0051]
在本技术的一个实施例中,当洗衣机是滚动洗衣机时,径向位移可以包括平行于地面的平行径向位移,以及垂直于地面的垂直径向位移,在图3的步骤s320中,基于位移,确定洗衣机中的负载在洗衣机内筒中的偏心位置,可以包括:比较平行径向位移、平行径向位移以及轴向位移,得到第二比较结果;基于第二比较结果,确定偏心位置。
[0052]
在该实施例中,发明人发现,由于外筒上安装有吊簧和减振器,吊簧具有悬挂作用,减振器具有减小洗衣机外筒振动位移的作用,在滚筒洗衣机吊簧及减振器的作用下外筒在垂直于地面的径向方向的振动小于外筒在平行于地面的径向方向的振动,因此,在确定偏心位置时,将垂直径向位移与平行径向位移进行区分,能够使偏心位置的确定更加准
确。
[0053]
在本技术的一个实施例中,若第二比较结果为,平行径向位移大于垂直径向位移、或平行径向位移大于轴向位移,则确定偏心位置为内筒靠近位移测量位置的一端;若第二比较结果为,平行径向位移小于垂直径向位移、或平行径向位移小于轴向位移,则确定偏心位置为内筒远离位移测量位置的另一端;若第二比较结果为,平行径向位移接近垂直径向位移、或平行径向位移接近轴向位移,则确定偏心位置为内筒的中部。
[0054]
在该实施例中,参照上述记载,在洗衣机脱水过程中,偏心位置内筒振动通常比其他位置更加剧烈,而振动剧烈时,由于传动机构的固定和重力的作用,平行径向位移通常大于垂直径向位移或轴向位移,因此,当位移测量位置处的平行径向位移大于垂直径向位移或轴向位移,则说明位移测量位置处靠近偏心位置,若位移测量位置靠近开口端,则可以确定偏心位置为前偏心;若位移测量位置靠近封闭端,则可以确定偏心位置为后偏心;若径向位移与轴向位移相近,则可以确定偏心位置为内筒中部;当位移测量位置处的平行径向位移小于垂直径向位移或轴向位移,则说明位移测量位置处远离偏心位置,若位移测量位置靠近开口端,则可以确定偏心位置为后偏心;若位移测量位置靠近封闭端,则可以确定偏心位置为前偏心。
[0055]
在该实施例中,可以将平行径向位移用y表示,将垂直径向位移用z表示,将轴向位移用x表示,以位移测量位置靠近内筒开口端为例,x、y、z与偏心位置的关系可以如表2所示。
[0056]
表2 x、y、z与偏心位置的关系
[0057]
x、y、z数值关系偏心量位置判定y>x或y>z前偏心y<x或y<z后偏心y与x或z数值接近中偏心
[0058]
在本技术的一个实施例中,若第二比较结果为,若平行径向位移与垂直径向位移的比值大于第三设定比值,或平行径向位移与轴向位移的比值大于第四设定比值,则确定偏心位置为内筒靠近位移测量位置的一端;若平行径向位移与垂直径向位移的比值小于第五设定比值,或平行径向位移与轴向位移的比值小于第六设定比值,则确定偏心位置为内筒远离位移测量位置的另一端;若平行径向位移与垂直径向位移的比值大于第三设定比值且小于第五设定比值,或平行径向位移与轴向位移的比值大于第四设定比值且小于第六设定比值,则确定偏心位置为内筒的中部。在该实施例中,第三设定比值和第四设定比值可以相同,第五设定比值和第六设定比值可以相同,第三设定比值、第四设定比值、第五设定比值和第六设定比值可以根据实际情况设置。
[0059]
在该实施例中,x、y、z与偏心位置的关系可以如表3所示。表3中的第三设定比值和第四设定比值相同均为a,表3中的第五设定比值和第六设定比值相同均为b。
[0060]
表3 x、y、z与偏心位置的关系
[0061]
x、y、z比例关系偏心量位置判定y/x>a或y/z>a前偏心y/x<b或y/z<b后偏心b<y/x<a或b<y/z<a中偏心
[0062]
在本技术的一个实施例中,若第二比较结果为,若平行径向位移与垂直径向位移的差值大于第三设定差值,或平行径向位移与轴向位移的差值大于第四设定差值,则确定偏心位置为前偏心;若平行径向位移与垂直径向位移的差值小于第五设定差值,或平行径向位移与轴向位移的差值小于第六设定差值,则确定偏心位置为后偏心;若平行径向位移与垂直径向位移的差值大于第三设定差值且小于第五设定差值,或平行径向位移与轴向位移的差值大于第四设定差值且小于第六设定差值,则确定偏心位置为中偏心。在该实施例中,第三设定差值和第四设定差值可以相同,第五设定差值和第六设定差值可以相同,第三设定差值、第四设定差值、第五设定差值和第六设定差值可以根据实际情况设置。
[0063]
在该实施例中,以位移测量位置靠近内筒开口端为例,x、y、z与偏心位置的关系可以如表4所示。表4中的第三设定差值和第四设定差值相同均为c,表3中的第五设定差值和第六设定差值相同均为d。
[0064]
表4 x、y、z与偏心位置的关系
[0065]
x、y、z比例关系偏心量位置判定y
‑
x>c或y
‑
z>c前偏心y
‑
x<d或y
‑
z<d后偏心d<y
‑
x<c或d<y
‑
z<c中偏心
[0066]
在本技术的一个实施例中,可以测量外筒沿着外筒平行于地面的径向方向振动产生的最大平行径向位移,作为平行径向位移;测量在外筒平行于地面的径向方向达到最大平行径向位移时,外筒沿着外筒垂直于地面的径向方向振动产生的位移,作为垂直径向位移;测量在外筒平行于地面的径向方向达到最大平行径向位移时,外筒沿着外筒的轴向方向发生的位移,作为轴向位移,由于脱水过程中,平行径向位移通常大于垂直径向位移和轴向位移,因此根据最大平行径向位移确定的偏心位置通常是准确的偏心位置。
[0067]
在本技术的一个实施例中,可以测量外筒沿着外筒平行于地面的径向方向振动产生的最大平行径向位移,作为平行径向位移;可以测量外筒沿着外筒垂直于地面的径向方向振动产生的最大垂直径向位移,作为垂直径向位移;可以测量外筒沿着外筒轴向方向振动产生的最大轴径向位移,作为轴向位移,根据最大平行径向位移、最大垂直径向位移和最大轴向位移确定的偏心位置,更加准确。
[0068]
在本技术的一个实施例中,在执行本技术的洗衣机脱水方法之前,可以先对负载进行抖散动作,以避免负载打结导致确定的目标转速不准确。图4示意性示出了根据本技术的一个实施例的滚筒洗衣机脱水方法流程图,滚筒洗衣机脱水方法的执行主体可以是洗衣机、洗衣机中的控制器、或洗衣机中的主控装置,如图4所示,洗衣机脱水方法可以包括步骤s410至步骤s470,详细介绍如下:
[0069]
在步骤s410中,开始;
[0070]
在步骤s420中,滚筒洗衣机负载抖散;
[0071]
在步骤s430中,滚筒洗衣机负载偏心量检测;
[0072]
在步骤s440中,滚筒洗衣机负载偏心位置检测;
[0073]
在步骤s450中,根据滚筒洗衣机负载偏心量及偏心位置确定滚筒洗衣机脱水转速;
[0074]
在步骤s460中,根据脱水转速进行滚筒洗衣机脱水过程;
[0075]
在步骤s470中,结束。
[0076]
在本技术的一个实施例中,在图4的步骤在步骤s440中,滚筒洗衣机负载偏心位置检测可以如图5所示,图5示意性示出了根据本技术的一个实施例的确定偏心位置的流程图,其中,将平行径向位移用y表示,将垂直径向位移用z表示,将轴向位移用x表示,可以包括步骤s510至步骤s540,详细介绍如下:
[0077]
在步骤s510中,检测滚筒洗衣机实时转速;
[0078]
在步骤s520中,检测当前转速下滚筒洗衣机外筒在x、y、z三个方向上的振动位移;
[0079]
在步骤s530中,比较获得y方向的最大振动位移及其对应的x、z振动位移;
[0080]
在步骤s540中,按照表2、表3或表4规则获得负载偏心在洗衣机内筒中的位置。
[0081]
在图5的实施例中,通过实时检测洗衣机的振动位移,能够准确找到洗衣机外筒在y方向的最大振动位移。
[0082]
在本技术的一个实施例中,在图4的步骤在步骤s440中,滚筒洗衣机负载偏心位置检测可以如图6所示,图6示意性示出了根据本技术的一个实施例的确定偏心位置的流程图,可以包括步骤s610至步骤s640,详细介绍如下:
[0083]
在步骤s610中,检测滚筒洗衣机实时转速;
[0084]
在步骤s620中,检测当前转速下滚筒洗衣机外筒在x、y、z三个方向上的振动位移;
[0085]
在步骤s630中,比较获得x、y、z三个方向上的最大振动位移;
[0086]
在步骤s640中,按照表2、表3或表4规则获得负载偏心在洗衣机内筒中的位置。
[0087]
在图6的实施例中,通过实时检测洗衣机的振动位移,能够准确找到洗衣机外筒在x、y、z三个方向的最大振动位移。
[0088]
虽然已参照几个典型实施方式描述了本技术,但应当理解,所用的术语是说明和示例性、而非限制性的术语。由于本技术能够以多种形式具体实施而不脱离申请的精神或实质,所以应当理解,上述实施方式不限于任何前述的细节,而应在随附权利要求所限定的精神和范围内广泛地解释,因此落入权利要求或其等效范围内的全部变化和改型都应为随附权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。