1.本实用新型涉及一种负压吸附式爬壁机器人,属于机器人技术领域。
背景技术:
2.目前城市中的高层建筑越来越多,高层建筑能够大幅提升城市空间的利用率,同时高层建筑的清理保养问题也愈加突出。高层建筑的清理保养难度比较大,采用人工清理保养不仅耗费人力、物力,而且有一定的危险。与此同时,由于高层建筑大多采用玻璃幕墙,外层表面较为光顺且凸出建筑较少,这也为爬壁机器人的应用提供了机遇。此外,爬壁机器人还广泛应用于造船业当中的涂装、除锈等作业。目前造船业正推进“壳舾涂一体化”,造船业正在向智能化的方向发展,需要大量的工业机器人提高船舶制造和维修的工作效率,将会有更多的智能机器人应用到造船业当中。
3.目前,爬壁机器人的结构设计多种多样,按移动方式可分为车轮式、履带式和脚步式三类不同的吸附方式和移动方式的组合就构成了各式各样的爬壁机器人,例如履带式磁吸附爬壁机器人,轮式单吸盘爬壁机器人等。现有技术中的爬壁机器人大多结构复杂,运动过程冲击大,移动连贯性不好,吸附力小,承载小等缺陷。
技术实现要素:
4.针对现有技术中存在的上述缺陷,本实用新型提供了一种结构简单、移动连贯性好、承载力大的负压吸附式爬壁机器人。
5.本实用新型是通过如下技术方案来实现的:一种负压吸附式爬壁机器人,其特征是:包括运动机构、吸附装置,所述运动机构包括连接架和对称连接在所述连接架两端的两个链条传动装置,所述链条传动装置包括安装板、传动链条、主动链轮、从动链轮、链条支撑导向构件、电机,主动链轮和从动链轮分别安装在所述安装板的两端,所述电机与所述连接架固定连接并且其输出轴与所述主动链轮连接,所述传动链条连接在主动链轮和从动链轮之间,所述传动链条为带耳链条,所述链条支撑导向构件包括第一支撑导向构件和第二支撑导向构件,所述第一支撑导向构件为直板结构,所述第二支撑导向构件为弧形板结构,第一支撑导向构件固定连接在所述安装板的内侧边缘位置形成为平直导轨段,第二支撑导向构件连接在所述安装板的外侧边缘位置并且第二支撑导向构件的弧形结构朝向外侧形成为圆弧导轨段,传动链条通过第一支撑导向构件和第二支撑导向构件支撑并导向,所述吸附装置为多个,每个所述吸附装置包括真空吸盘、旋转升降机构、舵机、外壳,旋转升降机构和舵机设置在所述外壳内,真空吸盘设置在所述外壳外侧并与旋转升降机构的一端连接,旋转升降机构的另一端与舵机的输出端连接,所述吸附装置连接在传动链条的耳板上,并且所有所述吸附装置的真空吸盘均位于安装板的同一板面侧。
6.本实用新型中,运动机构中的链条传动装置在电机的驱动下驱动传动链条运动,并带动与传动链条连接在一起的吸附装置随之一起运动,通过控制不同的吸附装置的真空吸盘的吸附状态来实现机器人的不同的运动动作,从而实现机器人的前进、后退、转向等动
作。真空吸盘可通过舵机控制旋转升降机构的转动实现升降,从而可使得真空吸盘与壁面脱离或接触。
7.进一步的,所述旋转升降机构包括旋转轴和升降轴,升降轴的轴向端面上设置有带有斜向滑动面的第一凸块结构,旋转轴的轴向端面上设置有可与所述第一凸块结构上的斜向滑动面滑动配合的第二凸块结构,所述旋转轴和所述升降轴之间通过所述第二凸块结构和所述第一凸块结构可转动地配合连接,所述旋转轴与所述舵机的输出端连接,所述升降轴与所述真空吸盘连接,所述外壳内在所述升降轴处设置有复位弹簧。舵机带动旋转轴转动时,旋转轴上的第二凸块结构沿升降轴上的第一凸块结构的斜向滑动面滑动,将升降轴下压并带动真空吸盘下压,可使真空吸盘与吸附面接触。舵机带动旋转轴反向转动时,旋转轴复位,升降轴通过复位弹簧进行复位,真空吸盘脱离吸附面。
8.进一步的,为便于气体管路及电线的布置,所述安装板上设置有滑道,所述滑道内设置有滑块,所述滑块通过连杆机构与传动链条连接。气体管路及电线可集束后与滑块连接,传动链条转动时通过连杆机构带动滑块在滑道内移动,从而可避免气体管路、电线发生缠绕,保证电路及气路的正常工作。
9.本实用新型的有益效果是:本实用新型结构简单,可在竖直的墙面上爬行且可以自由转向,本实用新型通过链条的转动和吸附装置中真空吸盘的启闭的配合即可以完成相应的运动动作,可进行前进、后退、转向等动作。本实用新型采用链条传动带动真空吸盘运动,吸收了履带式车辆的运动特点,运动过程冲击小、运动流畅,移动连贯性好,移动速度快,且本实用新型采用链条传动,能保持准确的传动比,传动效率高,传动可靠,过载能力强,能在低速重载下较好工作,并可在高温环境和多尘环境中工作,成本相对也较低;本实用新型因具有多个真空吸盘,吸附力大,可以携带较为大型的设备,并且本实用新型采用舵机和旋转升降机构控制真空吸盘,与一般的仅凭吸盘的真空吸附相比,吸附效果好,可承载的设备重量更大。
附图说明
10.图1是本实用新型的结构示意图;
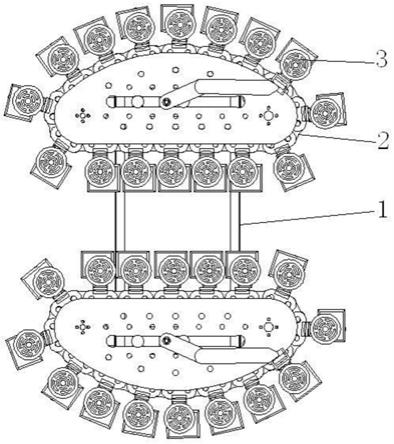
11.图2是图1的俯视示意图;
12.图3是图1的侧视示意图;
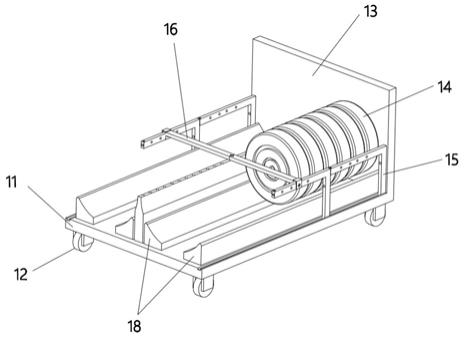
13.图4是本实用新型的立体图;
14.图5是本实用新型中连接架与运动机构的连接结构示意图;
15.图6是本实用新型中的链条传动装置的主视图;
16.图7是图6的后视图;
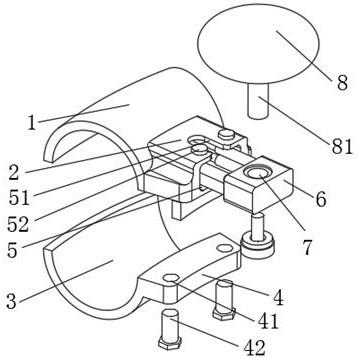
17.图8是本实用新型中的吸附装置的立体结构示意图;
18.图9是本实用新型中去掉外壳后的吸附装置的结构示意图;
19.图10是本实用新型中的吸附装置的主视图;
20.图11是图10的俯视图;
21.图12是图10的侧视图;
22.图13是图10中的a
‑
a剖视图;
23.图14是图10中的b
‑
b剖视图;
24.图15是本实用新型中的旋转轴的结构示意图;
25.图16是本实用新型中的升降轴的结构示意图;
26.图17是本实用新型中的吸附装置的工作示意图;
27.图中,1、连接架,2、链条传动装置,201、电机,202、传动链条,203、耳板,204、第二支撑导向构件,205、滑道,206、滑块,207、第一支撑导向构件,208、连杆机构,209、安装板,210、主动链轮,211、从动链轮,212、第一支撑导向构件,213、第二支撑导向构件,3、吸附装置,301、外壳,302、真空吸盘,303、舵机,304、电磁阀,305、旋转升降机构,3051、旋转轴,3052、第二凸块结构,3053、升降轴,3054、第一凸块结构,3055、复位弹簧,3056、第二凸块结构的斜向滑动面,3057、第一凸块结构的斜向滑动面,306、吸盘箍,307、气管。
具体实施方式
28.下面通过非限定性的实施例并结合附图对本实用新型作进一步的说明:
29.如附图所示,一种负压吸附式爬壁机器人,包括运动机构、吸附装置3。所述运动机构包括连接架1和对称连接在所述连接架1两端的两个链条传动装置2,连接架1为两根横梁结构,横梁的两端分别连接有连接板与链条传动装置2连接。两个链条传动装置2结构相同,并对称设置。所述链条传动装置2包括安装板209、传动链条202、主动链轮210、从动链轮211、链条支撑导向构件、电机201,主动链轮210和从动链轮211分别安装在所述安装板209的两端,传动链条202连接在主动链轮210和从动链轮211之间形成链条传动机构,所述传动链条202为带耳链条,传动链条202的链节上连接有耳板203。所述电机201与所述连接架1固定连接并且电机201的输出轴与所述主动链轮210连接。所述链条支撑导向构件包括第一支撑导向构件207和第二支撑导向构件213,所述第一支撑导向构件207为直板结构,所述第二支撑导向构件213为弧形板结构,第一支撑导向构件207固定连接在所述安装板209的内侧边缘位置形成为平直导轨段,第二支撑导向构件213连接在所述安装板209的外侧边缘位置并且第二支撑导向构件213的弧形结构朝向外侧形成为圆弧导轨段,传动链条202通过第一支撑导向构件207和第二支撑导向构件213支撑并导向。所述吸附装置3为多个,每个所述吸附装置3包括真空吸盘302、旋转升降机构305、舵机303、外壳301,旋转升降机构305和舵机303设置在所述外壳301内,真空吸盘302设置在所述外壳301外侧并与旋转升降机构305的一端连接,旋转升降机构305的另一端与舵机303的输出端连接,真空吸盘302为现有技术,真空吸盘302可与真空发生装置连接,通过在气管307上设置电磁阀304进行抽真空控制。所述吸附装置3通过外壳301连接在传动链条202的耳板203上,真空吸盘302的安装方向为:真空吸盘的轴线与主动链轮和从动链轮的轴线平行,并且所有所述吸附装置3的真空吸盘302均位于安装板209的同一板面侧。
30.本实用新型中的旋转升降机构可采用现有技术中的旋转升降机构,本实施例中,所述旋转升降机构305包括旋转轴3051和升降轴3053,升降轴3053的轴向端面上设置有3个带有斜向滑动面3057的第一凸块结构3054,旋转轴3051的轴向端面上设置有可与所述第一凸块结构3054上的斜向滑动面3057滑动配合的第二凸块结构3052,第二凸块结构3052上设有斜向滑动面3056,所述旋转轴3051和所述升降轴3053之间通过所述第二凸块结构3052和所述第一凸块结构3054可转动地配合连接,所述旋转轴3051与所述舵机303的输出端连接,所述升降轴3053与所述真空吸盘302的吸盘箍螺纹连接,所述外壳301内在所述升降轴3053
处设置有复位弹簧3055。舵机303带动旋转轴3051转动时,旋转轴3051上的第二凸块结构3052沿升降轴3053上的第一凸块结构3054的斜向滑动面滑动,将升降轴3053下压并带动真空吸盘302下压,可使真空吸盘302与吸附面接触。舵机303带动旋转轴3051反向转动时,旋转轴3051复位,升降轴3053通过复位弹簧3055进行复位,真空吸盘302脱离吸附面。舵机303为现有技术,可自市场采购。
31.为防止气管及电线等在机器人运动时发生缠绕,本实施例中,在所述安装板209上设置有滑道205,所述滑道205内滑动设置有滑块206,所述滑块206通过连杆机构208与传动链条202连接。气体管路及电线可集束后与滑块206连接,传动链条202转动时通过连杆机构208带动滑块206在滑道205内移动,从而可避免气体管路、电线发生缠绕,保证电路及气路的正常工作。
32.本实用新型通过电控装置可实现前进、倒退及转向动作。本实用新型采用的电控装置为现有技术。
33.本实用新型工作时,真空吸盘与真空发生装置连接,通过真空发生装置的启动和关闭来控制真空吸盘302的真空度,通过舵机303来控制真空吸盘302与壁面的贴合或脱离,通过链条传动装置2带动吸附装置的依次传递。吸附装置的启闭和链条传送的相互配合,由此实现机器人的前进、倒退与转向等动作。
34.以机器人的一侧的运动机构为例对本实用新型的工作原理进行说明:机器人在执行前进和后退的运动过程时,圆弧导轨段上的吸附装置3不进行工作,仅平直导轨段上的吸附装置3处于工作状态,即在机器人前进或后退时,圆弧导轨段上的吸附装置3的真空吸盘302始终悬空于壁面,平直导轨段上的吸附装置3的真空吸盘302与壁面吸附。伴随着传动链条202的传送,进入平直导轨段的吸附装置3逐个开启,在进入平直导轨段后吸附装置3的真空吸盘302在舵机303的作用下下压吸附于壁面上,伴随着传动链条202的进一步转动,位于平直导轨段出口侧的吸附装置3关闭,其真空吸盘302抬起脱离壁面,随后吸附装置3进入圆弧导轨段,在圆弧导轨段吸附装置3随传动链条202移动但是并不进行吸附工作,真空吸盘302与壁面之间悬空有间隙。传动链条202上的吸附装置3依次被移动到平直导轨段执行吸附动作,机器人两侧的运动机构同时协调运动工作,便可以实现机器人的前进。
35.机器人的后退动作,其原理与前进动作一致,只是传动链条的转动方向相反,并且吸附装置进入和离开机器人平直导轨段的入口和出口与前进时相反,其余的运动原理一致。
36.机器人的转向移动:当机器人需要完成转向动作时,机器人首先停止传动链条202的传动动作,随后所有的吸附装置3的真空吸盘302全部下压执行吸附动作,随后关闭机器人平滑导轨段上的吸附装置3,使该部分吸附装置3与壁面之间悬空产生间隙,随后传动链条202开始工作,吸附装置3在导轨上开始被传送。吸附装置3被传送至圆弧导轨段的入口处完成下压动作,在离开圆弧导轨段时执行抬起关闭吸附的动作,该过程中两侧的传动链条202的运动方向一致,机器人实现转向。在机器人完成转向之后,机器人调整姿态,再次使所有的吸附装置3下压,之后调整到前进和后退模式中,执行下一步的运动。
37.本实用新型的吸附装置的吸附力大,机器人的负载能力较大,可以胜任不同类型的垂直壁面作业,可根据实际需要,携带射流清洗装置、涂料喷涂装置或垂直避免清洗装置等不同类型的外挂设备。
38.本实施例中的其他部分均为现有技术,在此不再赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。