1.本发明属于机械传动技术领域,尤其是涉及机器人增力助力机构。
背景技术:
2.采用液压、气压和弹簧缸作为机械装置驱动的助力十分普遍,在关节型机器人上也经常采用,并且有时是一种必备手段。基本形式通常为助力缸尾端铰接在基座上,其缸杆直接与机器人臂铰接。这种方式存在明显缺点:第一,由于重力作用,机器人臂并不是每个姿态下都需要助力,基本上只有处于水平及接近水平姿态下需要,而其它情况下,尤其是机器人臂处于竖直或接近竖直姿态时,过大的助力反而需要消耗相反的主驱动力来抵消它,此时助力会起到阻力作用;第二,在无需助力的工作姿态变化时,助力缸仍然在进行往复伸缩运动,增加磨损。
3.因此,需要发明一种只在主动力不能满足需求时才提供助力、不需要时与机器人臂分离的限定工作范围的助力机构,它将对机器人性能提升起到巨大作用。
技术实现要素:
4.为克服上述缺点,本发明提供一种可限定助力范围的机器人臂助力机构,合理输出助力,减少机器人臂部分姿态下的助力缸空耗磨损。
5.本发明的机器人助力机构,在机器人臂关节或者其驱动装置等需要受助力驱动件的旋转中心轴线上,同轴铰接设置一个摆动体,两者可以绕中心轴线相对旋转摆动,摆动体上铰接有助力缸,助力缸的设置与常规技术相同。在受助力驱动件上设置有阻挡摆动体转动的凸台或凹台,或在摆动体上设置有阻挡机器人受助力驱动件转动的凸台或凹台。即,机器人受助力驱动件与摆动体上分别设有相互交错的凹凸部位和接触面,两接触面可以分离,当两构件相对旋转到机器人臂需要助力的一定摆角位置,两者的接触面相互接触,从而可以开始传递动力。
6.工作中,摆动体仅在机器人臂需要助力的摆角范围内摆动。机器人臂处于水平或接近水平姿态时,需要比较大的助力,机器人受助力驱动件和摆动体的接触面相互接触,助力缸推动与之铰接的摆动体绕机器人受助力驱动件旋转中心线旋转摆动,将助动缸的推拉力转化为旋转助动力矩,通过机器人受助力驱动件和摆动体的接触面将助动力矩传递到机器人臂上。当机器人臂远远偏离水平姿态,接近竖直姿态无需助力时,机器人受助力驱动件和摆动体的接触面分离,脱离助动。
7.这样的助力机构,既在必要时起到了有效的助动作用,又避免了无需助动时助力的反作用,还由于非助力姿态无需助力缸动作,大大减小了助力缸行程和空耗磨损。这种机构简洁高效,可有效提升机器人的负载能力,还可应用于其它需要助力的类似机械装置。
8.上述的机器人受助力驱动件可以是机器人臂或向机器人臂传力的驱动装置。
9.上述的摆动体可以是臂状的摆动臂,摆动臂一端铰接在机器人受助力驱动件的旋转中心轴线上,另一端与助力缸动力输出端铰接。
10.上述的摆动体还可以是圆盘状的摆动盘,摆盘和机器人受助力驱动件上分别设置有相互交错对应的凸台,凸台可以是一个或多个沿周向分布的,圆盘的端面上还设有与助力缸铰接的轴。
11.上述两相互交错对应的的凸台接触面,也可以分别是凸台和凹槽组成的组合。
12.另外,摆盘虽然和机器人受助力驱动件为同轴关系,但其自身旋转轴支撑结构可以是独立的。
13.助力缸可以是液压缸、气缸和弹簧缸等动力源,输出可以是推力,也可以是拉力。
附图说明
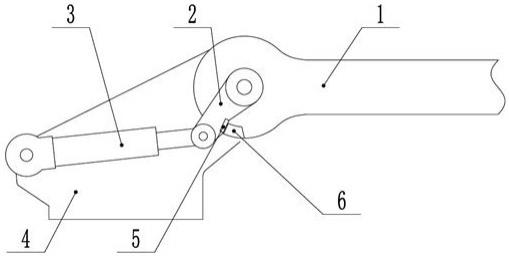
14.附图1是本发明的助力机构参与工作时的结构示意简图。
15.附图2是本发明的助力机构脱离工作时的结构示意简图。
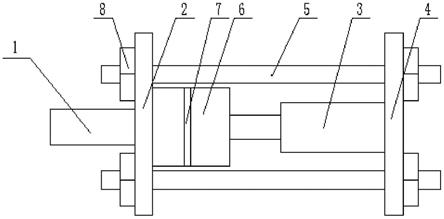
16.附图3是本发明的另一种结构示意简图。
17.附图4是本发明的再一种结构示意简图。
具体实施方式
18.下面结合附图对本发明作进一步详细说明。
19.实施例1。
20.如图1所示,在机器人臂(1)关节的旋转中心,铰接设置一个摆动臂(2),机器人臂(1)和摆动臂(2)可绕关节中心相对基座(4)旋转摆动,摆动臂(2)的另一端与一个推力助力缸(3)动力输出端铰接,助力缸(3)的尾端铰接在基座(4)上,摆动臂(2)的旋转摆动幅度受助力缸行程或外部限位限制,摆角范围小于机器人臂摆动角度。在机器人臂(1)上设置有凸台(6),在摆动臂(2)上相对位置设置有另一个凸台(5)。
21.当机器人臂旋转到需要助力的摆角范围内,即机器人臂处于水平或接近水平姿态时,机器人臂(1)和摆动臂(2)的两个凸台(5)、(6)接触面可以相互接触,助力缸(3)推动摆动臂(2)旋转摆动,将助力缸(3)的直线推力转化为旋转助动力矩,通过机器人臂和摆动体凸台(5)、(6)的接触面将助动力矩传递到机器人臂(1)上。如图2所示,当机器人臂远远偏离水平姿态,向竖直姿态靠近无需助力时,机器人臂上的凸台(5)随机器人臂摆动,脱离助力摆动臂(2)的工作范围,机器人臂和摆动体的凸台接触面分离,脱离助动。
22.这样的助力机构,既在必要时起到了有效的助动作用,又避免了无需助动时助力的反作用,还由于非助力姿态无需助力缸动作,大大减小了助力缸行程和空耗磨损。
23.实施例2。
24.如图3所示,在机器人臂(1)关节的旋转中心,铰接设置一个与其同轴的圆形摆动盘(7),摆动盘(7)的外缘与助力缸(3)动力输出端铰接,摆动盘(7)在助力缸(3)驱动下可绕轴心作有限角度的周向摆动,摆角范围小于机器人臂摆动角度。摆动盘(7)上设置有两个沿圆盘周向分布的凹槽(8)和(9),在机器人臂(1)上设置有两个与摆动盘凹槽对应的凸台(10)和(11)。当机器人臂旋转到需要助力的摆角范围内,即机器人臂处于水平或接近水平姿态时,机器人臂的凸台(10)、(11)和摆动盘凹槽(8)、(9)的一边分别可以相互接触,助力缸(3)推动摆动盘(7)旋转摆动,将助力缸的直线推力转化为旋转助动力矩,通过机器人臂凸台(10)、(11)和摆动盘凹槽(8)、(9)的接触面将助动力矩传递到机器人臂(1)上。当机器
人臂远远偏离水平姿态,向竖直姿态靠近无需助力时,机器人臂上的凸台随机器人臂摆动,脱离助力摆动臂的工作范围,机器人臂凸台和摆动盘凹槽的接触面分离,脱离助动。
25.实施例3。
26.如图4所示,本实施例的其他结构与实施例1相同,不同之处在于:机器人臂(1)上还设置固定有机器人臂驱动板(12),其凸台(6)设置在机器人臂驱动板(12)上,机器人臂的主驱动力通过驱动臂带动机器人臂摆动;摆动臂(2)和机器人关节铰接的一端与驱动板旋转中心同轴。
27.以上对本发明所提供的机器人助力机构进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
技术特征:
1.一种机器人助力机构,其特征在于,在机器人受助力驱动件的旋转中心轴线上同轴铰接设置一个摆动体,机器人受助力驱动件与摆动体上分别设有相互交错的凹凸部位和接触面,两接触面可以分离,当两构件相对旋转到机器人臂需要助力的一定摆角位置,两者的接触面相互接触,摆动体上铰接有助力缸。2.根据权利要求1所述的机器人助力机构,其特征还在于,所述的摆动体为圆盘状,圆盘的端面上设有与助力缸铰接的轴。3.根据权利要求1所述的机器人助力机构,其特征还在于,所述的摆动体为臂状,臂的一端与助力缸铰接。4.根据权利要求1所述的机器人助力机构,其特征还在于,所述的受助力驱动件为机器人臂。5.根据权利要求1所述的机器人助力机构,其特征还在于,所述的受助力驱动件为向机器人臂传力的驱动装置。
技术总结
一种机器人助力机构,在机器人受助力驱动件的旋转中心上铰接一个摆动体,两者上分别设有相互交错的凹凸部位和接触面,两接触面可以分离,当两构件相对旋转到机器人臂需要助力的一定摆角位置,两者的接触面相互接触,摆动体与助力缸铰接。这样的助力机构,既在必要时起到了有效的助动作用,又避免了无需助动时助力的反作用,还由于非助力姿态无需助力缸动作,大大减小了助力缸行程和空耗磨损。大大减小了助力缸行程和空耗磨损。大大减小了助力缸行程和空耗磨损。
技术研发人员:姜楠 行晓峰 程瑞星 胡文魁 崔晓东 李舸艄 马书严 范红兵
受保护的技术使用者:河南欧帕工业机器人有限公司
技术研发日:2021.04.12
技术公布日:2021/10/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。