1.本技术涉及焊接设备领域,尤其涉及一种自动焊管机。
背景技术:
2.展示道具生产过程中对方管的棱角要求很高,展示道具制作厂用的方管都是开槽折弯然后焊接加工制成。待焊管的横截面图如图1所示,在对该待焊管进行加工时需要将缝隙焊接。现今的展示道具制作厂,对于方管的焊接都是采用手工焊接的方式,这对工人的技术等级要求较高。而且,在焊接的过程中,人工焊接时间长,成本高,大批量焊接时,劳动强度过高,焊接效率低。
技术实现要素:
3.为了降低焊接时的人工成本、提高焊接效率,本技术提供一种自动焊管机。
4.本技术提供的自动焊管机采用如下的技术方案。
5.一种自动焊管机,包括待焊管输送装置和焊接机,所述待焊管输送装置用于驱动待焊管沿其所在直线方向移动至所述焊接机的焊枪焊接处。
6.通过采用上述技术方案,本技术的自动焊管机,通过待焊管输送装置将待焊管输送至焊枪焊接处进行自动焊接,无需工人操作,可以大大节省人工成本、提高焊接效率。
7.优选的,所述待焊管输送装置包括工作台、第一定位机构、第二定位机构和驱动电机,所述第一定位机构、第二定位机构和驱动电机均固定设置于工作台上,且第一定位机构和第二定位机构沿待焊管移动方向设置。
8.所述第一定位机构包括固定在工作台的工作面上的第一安装架和第一转动滚筒组,第一转动滚筒组包括两个上下间隔设置的第一转动滚筒,两个第一转动滚筒均通过轴转动设置在第一安装架上,两个第一转动滚筒的转动轴线平行,且两个第一转动滚筒的转动轴线所在的共同平面与工作面垂直,两个第一转动滚筒之间形成供待焊管通过的第一间隙,第一定位机构设置有至少两个,各第一定位机构沿待焊管移动方向间隔设置,各第一定位机构的第一转动滚筒的转动轴线相互平行。
9.所述第二定位机构包括固定在工作台的工作面上的第二安装架和第二转动滚筒组,第二转动滚筒组包括两个间隔设置的第二转动滚筒,两个第二转动滚筒均通过轴转动设置在第二安装架上,两个第二转动滚筒的转动轴线平行,且两个第二转动滚筒的转动轴线所在的共同平面与两个第一转动滚筒的转动轴线所在的共同平面平行,两个第二转动滚筒之间形成供待焊管通过的第二间隙,第二定位机构设置有至少两个,各第二定位机构沿待焊管移动方向间隔设置。
10.所述驱动电机的驱动轴与第一转动滚筒或第二转动滚筒的轴传动连接。
11.通过采用上述技术方案,可以很好的实现对待焊管移动时进行限位,避免其在移动时发生偏离,影响焊接精度。
12.优选的,所述第一定位机构的两个第一转动滚筒中位于上方的第一转动滚筒转动
设置在其轴上,位于下方的第一转动滚筒固定设置在其轴上,驱动电机的驱动轴与至少一个下方的第一转动滚筒的轴传动连接。
13.通过采用上述技术方案,可以更好地驱动待焊管的移动。
14.优选的,所述第一安装架包括间隔设置的两个固定在工作面上的第一支腿、固定连接在两个第一支腿的上端的第一顶板,第一转动滚筒的轴设置在两第一支腿之间,第一顶板上对应第一转动滚筒的轴的两端的位置设置有沿垂直于所述工作面方向延伸的第一螺纹孔,第一螺纹孔内旋拧设置有第一螺杆,位于上方的第一转动滚筒的轴上设置有供第一螺杆的杆部穿过的通孔,第一螺杆的杆部的端部还旋拧设置有第一挡止块,第一挡止块的上端面与第一转动滚筒的轴的下部挡止配合,两个第一支腿上还对应设置有沿上下方向延伸的第一导向滑槽,各第一转动滚筒的轴的两端均位于第一导向滑槽内且与第一导向滑槽导向配合,位于下方的第一转动滚筒的轴通过轴承设置在第一支腿上,所述轴承固定在第一支腿上。
15.通过采用上述技术方案,可以调节两个第一转动滚筒之间的间隙大小。
16.优选的,所述第二安装架包括间隔设置的两个第二支腿、固定连接在两个第二支腿的上端的第二顶板和固定连接在两个第二支腿的下端的第二底板,第二底板固定在工作面上,第二转动滚筒的轴设置在第二顶板和第二底板之间,所述第二定位机构的两个第二转动滚筒均转动设置在其轴上,至少一个第二支腿上对应第二转动滚筒的轴的两端的位置设置有第二穿孔,第二穿孔内设置有丝杠,靠近丝杠的第二转动滚筒的轴上设置有与第二穿孔对应的第二螺纹孔,丝杠的一端固定设置有旋拧部,丝杠上靠近旋拧部的位置还固定设置有第二挡止块,第二挡止块与旋拧部之间的丝杠的杆部为与第二穿孔转动配合的光杆,且光杆的长度等于第二穿孔的深度,丝杠的从第二穿孔穿出的杆部设置有与第二螺纹孔配合的外螺纹并且旋拧进第二螺纹孔内,第二顶板和第二底板上对应设置有第二导向滑槽,第二转动滚筒的轴的两端分别位于两个第二导向滑槽内,且第二转动滚筒的轴的两端与第二导向滑槽导向配合。
17.通过采用上述技术方案,可以调节两个第二转动滚筒之间的间隙大小。
18.优选的,所述工作面上还固定设置有可调节卡紧机构,可调节卡紧机构位于待焊管的移动路径上,可调节卡紧机构包括上夹件、下夹件、左夹件、右夹件和驱动组件,上夹件、下夹件、左夹件和右夹件之间围成供待焊管通过的调节通道,驱动组件至少与上夹件、下夹件、左夹件、右夹件中的一个传动连接,以改变调节通道的大小。
19.通过采用上述技术方案,可以将待焊管夹紧成所需焊接形状,从而更好地进行焊接。
20.优选的,所述驱动组件包括上驱动件、下驱动件、左驱动件和右驱动件,上驱动件、下驱动件、左驱动件和右驱动件均为电动推杆,上驱动件、下驱动件、左驱动件和右驱动件的伸缩杆分别与上夹件、下夹件、左夹件、右夹件固定连接。
21.通过采用上述技术方案,可以实现对待焊管四个面上的挤压调节。
22.优选的,所述可调节卡紧机构上还固定设置有焊枪支撑件,焊枪支撑件为鹅颈管,所述焊枪固定设置在鹅颈管上,所述焊枪焊接处位于所述调节通道的出口处。
23.通过采用上述技术方案,可以灵活地对焊枪的位置进行调节。
附图说明
24.图1是背景技术中的待焊管的横截面结构示意图;
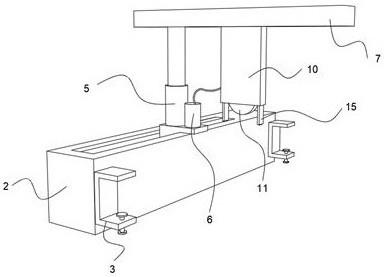
25.图2是本技术实施例的自动焊管机的整体结构示意图;
26.图3是图2中的第一定位机构的主视图;
27.图4是图2中的第一定位机构的左视图;
28.图5是图2中的第二定位机构的主视图;
29.图6是图2中的第二定位机构的左视图;
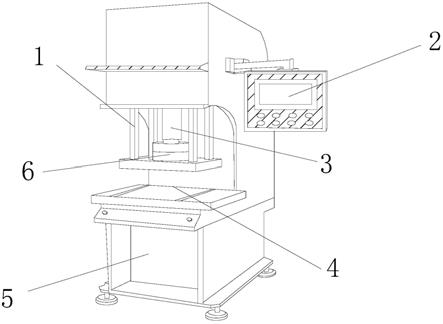
30.图7是图2中的可调节卡紧机构的左视图。
31.附图标记说明:1、工作台;2、第一定位机构;21、第一支腿;22、第一顶板;23、第一底板;24、第一导向滑槽;25、第一转动滚筒;26、第一间隙;27、第一螺杆;28、第一挡止块;3、第二定位机构;31、第二转动滚筒;32、第二间隙;33、第二支腿;34、第二顶板;35、第二底板;36、丝杠;37、旋拧部;38、第二挡止块;39、第二导向滑槽;4、驱动电机;41、链条;5、可调节卡紧机构;51、外壳体;52、上夹件;521、上驱动件;53、下夹件;531、下驱动件;54、左夹件;541、左驱动件;55、右夹件;551、右驱动件;56、调节通道;6、焊枪支撑件;7、待焊管。
具体实施方式
32.以下结合附图对本技术作进一步详细说明。
33.参照图2,本技术实施例公开了一种自动焊管机,包括待焊管输送装置和焊接机(图中未示出),待焊管输送装置用于驱动待焊管7沿其所在直线方向移动至焊接机的焊枪焊接处。待焊管输送装置包括工作台1、第一定位机构2、第二定位机构3、驱动电机4和可调节卡紧机构5。第一定位机构2、第二定位机构3、驱动电机4和可调节卡紧机构5均固定设置于工作台1上,且第一定位机构2、第二定位机构3和可调节卡紧机构5沿待焊管7移动方向间隔设置。
34.参照图3和图4,第一定位机构2包括固定在工作台1的工作面上的第一安装架和第一转动滚筒组。第一安装架包括间隔设置的两个第一支腿21、固定连接在两个第一支腿21的上端的第一顶板22和固定连接在两个第一支腿21的下端的第一底板23,第一底板23固定在工作面上。两个第一支腿21上对应设置有沿上下方向延伸的第一导向滑槽24。第一转动滚筒组包括两个上下间隔设置的第一转动滚筒25,第一转动滚筒25为硬质橡胶滚筒。位于上方的第一转动滚筒25转动设置在其轴上,位于下方的第一转动滚筒25固定设置在其轴上。两个第一转动滚筒25的转动轴线平行,且两个第一转动滚筒25的转动轴线所在的共同平面与工作面垂直,两个第一转动滚筒25之间形成供待焊管7通过的第一间隙26。第一转动滚筒组的两个第一转动滚筒25的轴的两端均位于第一导向滑槽24内且与第一导向滑槽24导向配合,位于下方的第一转动滚筒25的轴通过轴承设置在第一支腿21上。第一顶板22上对应上方的第一转动滚筒25的轴的两端的位置设置有沿垂直于工作面方向延伸的第一螺纹孔,第一螺纹孔内旋拧设置有第一螺杆27,位于上方的第一转动滚筒25的轴上设置有供第一螺杆27的杆部穿过的通孔,第一螺杆27的杆部的端部还旋拧设置有第一挡止块28,第一挡止块28的上端面与第一转动滚筒25的轴的下部挡止配合。位于上方的第一转动滚筒25通过第一螺杆27吊装在第一安装架上。第一定位机构2设置有四个,各第一定位机构2沿待焊管7移动方向间隔设置,且各第一定位机构2的第一转动滚筒25的转动轴线相互平行。驱
动电机4的驱动轴与两个下方的第一转动滚筒25的轴通过齿轮和链条41传动连接,第一转动滚筒25转动驱动置于其上的待焊管7移动。使用时,通过旋拧第一螺杆27,第一螺杆27上下移动带动上方的第一转动滚筒25向上移动,进而调节第一间隙26的大小使其适应待焊管7的尺寸。
35.参照图5和图6,第二定位机构3包括固定在工作台1的工作面上的第二安装架和第二转动滚筒组。第二转动滚筒组包括两个间隔设置的第二转动滚筒31,第二转动滚筒31为硬质橡胶滚筒。两个第二转动滚筒31均通过轴转动设置在第二安装架上。两个第二转动滚筒31的转动轴线平行,且两个第二转动滚筒31的转动轴线所在的共同平面与两个第一转动滚筒25的转动轴线所在的共同平面平行,两个第二转动滚筒31之间形成供待焊管7通过的第二间隙32。第二安装架包括间隔设置的两个第二支腿33、固定连接在两个第二支腿33的上端的第二顶板34和固定连接在两个第二支腿33的下端的第二底板35,第二底板35固定在工作面上。第二转动滚筒31的轴设置在第二顶板34和第二底板35之间,第二定位机构3的两个第二转动滚筒31均转动设置在其轴上。其中一个第二支腿33上对应第二转动滚筒31的轴的两端的位置设置有第二穿孔,第二穿孔内设置有丝杠36,靠近丝杠36的第二转动滚筒31的轴上设置有与第二穿孔对应的第二螺纹孔。丝杠36的一端固定设置有旋拧部37,丝杠36上靠近旋拧部37的位置还固定设置有第二挡止块38,第二挡止块38与旋拧部37之间的丝杠36的杆部为与第二穿孔转动配合的光杆,且光杆的长度等于第二穿孔的深度,丝杠36的从第二穿孔穿出的杆部设置有与第二螺纹孔配合的外螺纹并且旋拧进第二螺纹孔内。第二顶板34和第二底板35上对应设置有第二导向滑槽39,第二转动滚筒31的轴的两端分别位于两个第二导向滑槽39内,且第二转动滚筒31的轴的两端与第二导向滑槽39导向配合。第二定位机构3设置有两个,两个第二定位机构3沿待焊管7移动方向间隔设置。使用时,通过旋拧丝杠36的旋拧部37,丝杠36转动驱动丝杠36上的第二转动滚筒31靠近或远离旋拧部37,进而调节第二间隙32的大小使其适应待焊管7的尺寸。
36.参照图7,可调节卡紧机构5位于待焊管7的移动路径上,可调节卡紧机构5包括外壳体51、设置于外壳体51内的驱动组件以及金属材料制成的滚筒状的上夹件52、下夹件53、左夹件54和右夹件55。上夹件52、下夹件53、左夹件54和右夹件55之间围成供待焊管7通过的调节通道56。驱动组件包括上驱动件521、下驱动件531、左驱动件541和右驱动件551,上驱动件521、下驱动件531、左驱动件541和右驱动件551均为电动推杆,上驱动件521、下驱动件531、左驱动件541和右驱动件551的伸缩杆分别与上夹件52、下夹件53、左夹件54、右夹件55固定连接。各驱动件驱动各夹件移动,以改变调节通道56的大小,从而更好的挤压待焊管7使其保持所需的形状,进而方便焊接。外壳体51的外表面上还固定设置有焊枪支撑件6,焊枪支撑件6为鹅颈管,焊枪固定设置在鹅颈管上,焊枪焊接处位于调节通道56的出口处。鹅颈管的设置可以灵活地对焊枪的位置进行调节,方便使用。
37.本技术实施例的实施原理为:本技术的自动焊管机在使用时,将待焊管7置于第一间隙26和第二间隙32中,驱动电机4驱动下方的第一转动滚筒25转动,从而驱动待焊管7移动进入到调节通道56内,调节通道56对待焊管7进行挤压固形使其保持所需焊接形状,然后待焊管7从调节通道56内出来继续移动,待焊管7移动时经过焊枪焊接处,焊枪对其进行焊接。
38.本技术的自动焊管机通过待焊管输送装置将待焊管7输送至焊枪焊接处进行自动
焊接,无需工人操作,可以大大节省人工成本、提高焊接效率;而且第一定位机构2、第二定位机构3和可调节卡紧机构5能够对待焊管7进行移动时的限位及将待焊管7夹紧成所需焊接形状,提高焊接精度;另外,采用鹅颈管固定焊枪能够灵活地对焊枪的位置进行调节,方便使用。
39.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。