1.本实用新型涉及涂胶机器人领域,具体来说,涉及一种涂胶枪可多角度灵活使用的涂胶机器人。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.现有的涂胶机器人使用时,工位上的零件装夹完后,涂胶作业,需将机器人涂胶枪头紧贴在零件上进行涂胶,由于枪头是卡槽式,角度单一,在机器人运转过程中经常发生枪头碰撞到零件,导致枪头报废或者因角度限制无法涂胶,在现状的生产前提下,更换新枪头的数量较频繁,使用的成本也随之上升。
技术实现要素:
4.针对相关技术中的问题,本实用新型提出一种涂胶枪可多角度灵活使用的涂胶机器人,以克服现有相关技术所存在的上述技术问题。
5.为此,本实用新型采用的具体技术方案如下:
6.一种涂胶枪可多角度灵活使用的涂胶机器人,包括底座,底座的顶端设置有涂胶机器人本体,底座的内部设置有若干组升降机构,涂胶机器人本体的顶端一侧设置有涂胶枪安装架,涂胶枪安装架的底端设置有涂胶枪组件,涂胶枪组件的下方设置有支撑架,支撑架底端设置有支撑脚,支撑架的顶端设置有工作台,升降机构包括设置在底座内部顶端的电缸,电缸的底端设置有方形板一,方形板一的底端设置有方形板二,方形板二的底端设置有方形板三,方形板三的顶部两端分别设置有圆杆,圆杆的顶端依次贯穿方形板二及方形板一并延伸至方形板一的上方,电缸的输出轴与方形板二连接,方形板三的顶端且与圆杆所在位置相垂直的两侧分别设置有两组连接座,方形板二的两侧且在连接座的上方分别设置有两组交叉设置的连杆一,两组连杆一的顶端分别设置有连杆二,且连杆二的顶端与方形板一的侧边连接,两组连杆一的底端分别设置有连杆三,且连杆三的底端与连接座连接。
7.进一步的,为了在生产的过程中可实现涂胶枪头的多角度灵活使用,且降低涂胶枪头的更换频率,进而可以降低质量异常,降低投入成本,提升生产效率,提高生产品质,减少人力补胶,降低操作者的劳动强度,涂胶枪组件包括设置在涂胶枪安装架底端的枪头,枪头的顶端与涂胶枪安装架之间设置有调节螺母;枪头的底端沿竖直向下的方位向侧边延伸。
8.进一步的,为了能够将工件固定住,进而可以更加稳定的对工件进行涂胶,可提高涂胶的质量稳定性,工作台包括设置在支撑架顶端的外框架,外框架的内部相互垂直设置有滑槽一及滑槽二,滑槽一的两端分别设置有滑块一,滑槽二的两端分别设置有滑块二,滑
块一与外框架的内部侧壁之间设置有若干组弹簧一,滑块二与外框架的内部侧壁之间设置有若干组弹簧二;弹簧一及弹簧二靠近外框架的中心位置的一端分别设置有倒角。
9.本实用新型的有益效果为:
10.(1)本实用新型通过将涂胶机器人枪头改为螺母固定式,从而在生产的过程中可实现涂胶枪头的多角度灵活使用,且降低涂胶枪头的更换频率,进而可以降低质量异常,降低投入成本,提升生产效率,提高生产品质,减少人力补胶,降低操作者的劳动强度。
11.(2)通过设置升降机构,从而能够使涂胶机器人本体上下移动,进而可以根据具体的工作环境升降涂胶机器人本体,进而可以使本设备适应更多的工作环境,提高使用的灵活性,且通过将涂胶机器人本体升起,方便叉车等搬运机器搬运本设备。
附图说明
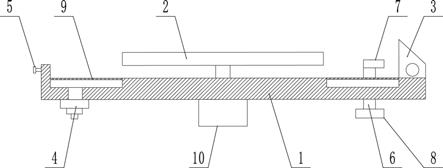
12.图1是根据本实用新型实施例的一种涂胶枪可多角度灵活使用的涂胶机器人的结构示意图;
13.图2是图1中a处的局部放大图;
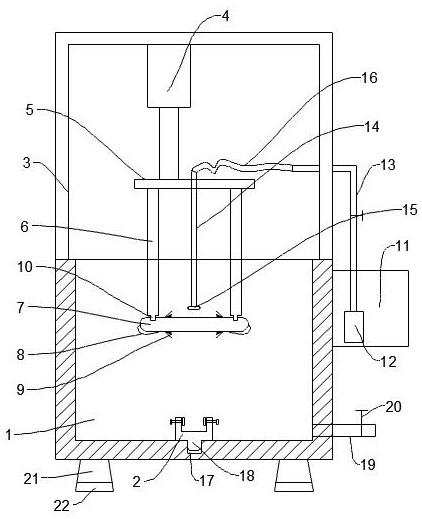
14.图3是根据本实用新型实施例的一种涂胶枪可多角度灵活使用的涂胶机器人的升降机构的结构示意图;
15.图4是根据本实用新型实施例的一种涂胶枪可多角度灵活使用的涂胶机器人的工作台的结构示意图;
16.图5是根据本实用新型实施例的一种涂胶枪可多角度灵活使用的涂胶机器人的滑块一的结构示意图。
17.图中:
18.1、底座;2、涂胶机器人本体;3、升降机构;301、电缸;302、方形板一;303、方形板二;304、方形板三;305、圆杆;306、连接座;307、连杆一;308、连杆二;309、连杆三;4、涂胶枪安装架;5、涂胶枪组件;501、枪头;502、调节螺母;6、支撑架;7、支撑脚;8、工作台;801、外框架;802、滑槽一;803、滑槽二;804、滑块一;805、滑块二;806、弹簧一;807、弹簧二。
具体实施方式
19.现结合附图和具体实施方式对本实用新型进一步说明,如图1
‑
5所示,根据本实用新型实施例的涂胶枪可多角度灵活使用的涂胶机器人,包括底座1,底座1的顶端设置有涂胶机器人本体2,底座1的内部设置有若干组升降机构3,涂胶机器人本体2的顶端一侧设置有涂胶枪安装架4,涂胶枪安装架4的底端设置有涂胶枪组件5,涂胶枪组件5的下方设置有支撑架6,支撑架6底端设置有支撑脚7,支撑架6的顶端设置有工作台8。
20.借助于上述方案,本实用新型在生产的过程中可实现涂胶枪头的多角度灵活使用,且降低涂胶枪头的更换频率。
21.在一个实施例中,对于上述升降机构3来说,通过升降机构3包括设置在底座1内部顶端的电缸301,电缸301的底端设置有方形板一302,方形板一302的底端设置有方形板二303,方形板二303的底端设置有方形板三304,方形板三304的顶部两端分别设置有圆杆305,圆杆305的顶端依次贯穿方形板二303及方形板一302并延伸至方形板一302的上方,电缸301的输出轴与方形板二303连接,方形板三304的顶端且与圆杆305所在位置相垂直的两
侧分别设置有两组连接座306,方形板二303的两侧且在连接座306的上方分别设置有两组交叉设置的连杆一307,两组连杆一307的顶端分别设置有连杆二308,且连杆二308的顶端与方形板一302的侧边连接,两组连杆一307的底端分别设置有连杆三309,且连杆三309的底端与连接座306连接,从而能够使涂胶机器人本体2上下移动,进而可以根据具体的工作环境升降涂胶机器人本体2,进而可以使本设备适应更多的工作环境,提高使用的灵活性,且通过将涂胶机器人本体2升起,方便叉车等搬运机器搬运本设备。
22.在一个实施例中,对于上述涂胶枪组件5来说,通过涂胶枪组件5包括设置在涂胶枪安装架4底端的枪头501,枪头501的顶端与涂胶枪安装架4之间设置有调节螺母502;枪头501的底端沿竖直向下的方位向侧边延伸,从而在生产的过程中可实现涂胶枪头的多角度灵活使用,且降低涂胶枪头的更换频率,进而可以降低质量异常,降低投入成本,提升生产效率,提高生产品质,减少人力补胶,降低操作者的劳动强度。
23.在一个实施例中,对于上述工作台8来说,通过工作台8包括设置在支撑架6顶端的外框架801,外框架801的内部相互垂直设置有滑槽一802及滑槽二803,滑槽一802的两端分别设置有滑块一804,滑槽二803的两端分别设置有滑块二805,滑块一804与外框架801的内部侧壁之间设置有若干组弹簧一806,滑块二805与外框架801的内部侧壁之间设置有若干组弹簧二807;弹簧一806及弹簧二807靠近外框架801的中心位置的一端分别设置有倒角,从而能够将工件固定住,进而可以更加稳定的对工件进行涂胶,可提高涂胶的质量稳定性。
24.为了方便理解本实用新型的上述技术方案,以下就本实用新型在实际过程中的工作原理或者操作方式进行详细说明。
25.在实际应用时,根据工件的涂胶要求算好枪头501的弯度及长度,枪头501通过调节螺母502固定,将工件放入外框架801中,滑块一804借助弹簧一806的弹力及滑块二805借助弹簧二807的弹力,将工件固定住。通过涂胶机器人本体2对工件进行涂胶。在需要对涂胶机器人本体2进行升降时,启动电缸301,电缸301通过输出轴带动方形板二303移动,方形板二303使得连杆一307转动,连杆一307使得连杆二308及连杆三309转动,从而使得方形板三304上下移动,进而方形板三304使得涂胶机器人本体2上下移动,且使得电缸301的行程增加一倍。
26.综上所述,借助于本实用新型的上述技术方案,通过将涂胶机器人枪头改为螺母固定式,从而在生产的过程中可实现涂胶枪头的多角度灵活使用,且降低涂胶枪头的更换频率,进而可以降低质量异常,降低投入成本,提升生产效率,提高生产品质,减少人力补胶,降低操作者的劳动强度。通过设置升降机构3,从而能够使涂胶机器人本体2上下移动,进而可以根据具体的工作环境升降涂胶机器人本体2,进而可以使本设备适应更多的工作环境,提高使用的灵活性,且通过将涂胶机器人本体2升起,方便叉车等搬运机器搬运本设备。
27.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。