1.本实用新型涉及自动控制装置领域,尤其涉及一种车辆自动驾驶的控制装置。
背景技术:
2.现在很多的景区都是使用电动车载乘客进行游玩,但是电动车都是需要配一名司机进行驾驶,每辆车都要配一名司机,会浪费大量的劳动力,从而增加了景区的费用支出。随着自动驾驶技术的发展,自动驾驶技术的安全性也正在逐步提高,针对自动驾驶过程中行人出现在行驶路径上的工况,车辆正常情况下都会采取制动的措施来避免碰撞的发生。现有的自动驾驶车辆的研究很多都是在汽车类的自动驾驶,而且现在的自动驾驶都是需要建设大量的基站进行与车辆通信,但是假设基站需要花费的费用较高,很多领域无法实际推广,因此,需要设计一种不需要基站通信就可以实现自动驾驶的电动车装置。
技术实现要素:
3.本实用新型的目的在于提供一种车辆自动驾驶的控制装置,解决现有景区观光游览车都是需要配司机进行行驶,需要花费大量的人力物力的技术问题。
4.一种车辆自动驾驶的控制装置,包括加速器、电池组、牵引电机、车架、激光雷达、转向系统、车载控制器、车轮、制动器和角度传感器,所述车轮设置在车架的底部,所述牵引电机设置在车轮的转轴上,并带动车轮转动,所述加速器设置在车架前端的底部,所述车载控制器经加速器与牵引电机连接,所述电池组设置在车架的中部位置,并经加速器与牵引电机连接供电,所述转向系统设置在前端的车轮上,所述车载控制器与转向系统连接,所述制动器设置在车架底部,与车载控制器连接,制动车轮,所述角度传感器设置在转向系统的转向杆的前端,所述激光雷达设置在车架的前端,所述角度传感器和激光雷达均与车载控制器连接。
5.进一步地,所述车架上还设置有超声波传感器组,所述超声波传感器组设置在车架的后端。
6.进一步地,所述超声波传感器组包括固定杆和超声波传感器阵列,所述固定杆设置为弧形杆,超声波传感器阵列的超声波传感器等弧度设置在弧形杆上,所述超声波传感器阵列与车载控制器连接。
7.进一步地,所述车架上还设置有摄像头,所述摄像头设置在车架的前端,并设置有竖直固定杆,竖直固定杆竖直固定在车架的前端,所述摄像头固定在竖直固定杆上。
8.进一步地,所述车架与车轮之间设置有叠层弓字钢,所述叠层弓字钢的底部与车轮的转动赶转动连接,所述叠层弓字钢的顶部与车架的底部焊接固定。
9.进一步地,所述激光雷达包括前端弧形杆和激光雷达阵列,所述前端弧形杆设置在车架的前端,且弧形凸向正前方,所述激光雷达阵列等间距设置在前端弧形杆上,所述激光雷达阵列与车载控制器连接。
10.本实用新型采用了上述技术方案,本实用新型具有以下技术效果:
11.本实用新型低成本,依靠机载摄像头、激光雷达、超声波传感器完成自动行驶、自动转向的功能,无需建设定位基站,可节省大量成本,高适应性,车对行驶环境的依赖不强,在没有高速网络、配套道路定位基站的环境中可以正常使用,适用于各种小区、公园、机场、车站、旅游区的专用道路,高可靠性,车利用多种传感器感知环境,行驶速度低,安全可靠。
附图说明
12.图1为本实用新型俯视图。
13.图2为本实用新型侧视图。
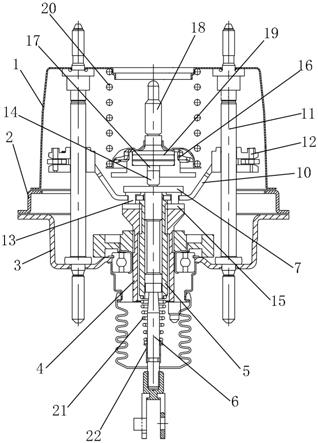
14.图3为本实用新型立体图。
15.图中标号:1
‑
加速器;2
‑
电池组;3
‑
超声波传感器组;4
‑
牵引电机;5
‑
车架;6
‑
激光雷达;7
‑
摄像头;8
‑
转向系统;9
‑
车载控制器;10
‑
叠层弓字钢;11
‑
车轮;12
‑
制动器;13
‑
角度传感器。
具体实施方式
16.为使本实用新型的目的、技术方案及优点更加清楚明白,举出优选实施例,对本实用新型进一步详细说明。然而,需要说明的是,说明书中列出的许多细节仅仅是为了使读者对本实用新型的一个或多个方面有一个透彻的理解,即便没有这些特定的细节也可以实现本实用新型的这些方面。
17.一种车辆自动驾驶的控制装置,如图1
‑
3所示,包括加速器1、电池组2、牵引电机4、车架5、激光雷达6、转向系统8、车载控制器9、车轮11、制动器12和角度传感器13。所述车轮11设置在车架5的底部,所述牵引电机4设置在车轮11的转轴上,并带动车轮转动,所述加速器1设置在车架5前端的底部,所述车载控制器9经加速器1与牵引电机4连接,所述电池组2设置在车架5的中部位置,并经加速器1与牵引电机4连接供电,所述转向系统(8)设置在前端的车轮11上,所述车载控制器9与转向系统8连接,所述制动器12设置在车架5底部,与车载控制器9连接,制动车轮11,所述角度传感器13设置在转向系统8的转向杆的前端,所述激光雷达6设置在车架5的前端,所述角度传感器13和激光雷达6均与车载控制器9连接。
18.车架5采用铝合金材料支撑,如图1
‑
3所示的图为实验车模型,在实际生产时,车架5的长度和宽度根据需要相应变大,根据需要载客量进行变大。转向系统8为现有转向电子控制装置,制动器12控制转向系统8转动方向盘,车载控制器9根据车速和前方的障碍物及时的控制制动器12刹车处理。制动器12为现有的电子自动器。角度传感器13主要是检测转向系统8转向的角度,然后把检测的数据传给车载控制器9,让车载控制器9调控转向系统8的转动的角度。
19.载控制器9采用现有的stm32f103c8t6开发板最小系统单片机核心板模块,对其它部件进行控制,
20.本实用新型实施例中,所述车架5上还设置有超声波传感器组3,所述超声波传感器组3设置在车架5的后端。超声波传感器组3主要是为了检测后面障碍物与车位的距离,然后把障碍物的距离传给车载控制器9,车载控制器9降低车速或者发出提示声音,避免后面的车或者人等与车相撞。所述超声波传感器组3包括固定杆和超声波传感器阵列,所述固定杆设置为弧形杆,超声波传感器阵列的超声波传感器等弧度设置在弧形杆上,所述超声波
传感器阵列与车载控制器9连接。方向盘、转向助力器和角度传感器等构成现有的转向系统。
21.本实用新型实施例中,所述车架5上还设置有摄像头7,所述摄像头7设置在车架5的前端,并设置有竖直固定杆,竖直固定杆竖直固定在车架5的前端,所述摄像头7固定在竖直固定杆上。摄像头7使用现有的轮廓算法检测前面的人或者障碍物等,如果检测的轮廓与人相似时,可以检测人脸,然后自动按喇叭等。这些控制均是由车载控制器9完成的。
22.本实用新型实施例中,所述车架5与车轮11之间设置有叠层弓字钢10,所述叠层弓字钢10的底部与车轮11的转动赶转动连接,所述叠层弓字钢10的顶部与车架5的底部焊接固定。叠层弓字钢10是为了增加车轮与车架5之间的高度,从而可以增高车辆,使得用户体验感更好。
23.本实用新型实施例中,所述激光雷达6包括前端弧形杆和激光雷达阵列,所述前端弧形杆设置在车架5的前端,且弧形凸向正前方,所述激光雷达阵列等间距设置在前端弧形杆上,所述激光雷达阵列与车载控制器9连接。激光雷达6主要是检测前端障碍,然后给车载控制器9判别控制的方向和车的速度等。车可以搭载游客游览景区。游客选择好景点后,无人驾驶服务车自动规划路线将游客带到景点,增加讲解装置还能够给游客做景点讲解,变身游客的私人导游。
24.系统启动后,车载传感器构成的智能感知系统检测车辆周围状况及车辆自身状况,如果车辆存在故障或障碍系统无法进入辅助驾驶需要等待故障排除;若车辆状况良好则自动进入辅助驾驶模式,汽车启动上路行驶,行驶过程中智能感知系统实时监测道路环境状况,当遇到障碍物或突发状况时由控制电脑板判断路况后自动刹车或绕行。系统也支持手动驾驶,在辅助驾驶过程中若人为转动方向盘可关闭无人驾驶模。
25.该车还可以用于承担为处于隔离地带或危险区域的人们提供运送生活物资、救援物资的工作。避免工作人员进入危险区域、减轻工作人员的工作量,为在隔离区的人员提供生活便利。
26.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。