1.本技术涉及交通信号灯控制技术领域,尤其涉及一种交通信号灯系统、控制方法、装置、介质及程序产品。
背景技术:
2.随着城市化进程的推进,交通拥堵问题愈发凸显。而交通拥堵情况往往与时间有关,例如,城市主干道在上下班高峰时段拥堵情况严重、高速路入口附近道路在节假日期间拥堵情况严重等。
3.目前,解决交通拥堵问题的方式是在拥堵时段的拥堵路段安排交警人员管理交通秩序、疏通拥堵,或者是通过拓宽拥堵路段道路、铺设并行道路等方式来减小拥堵路段的通行压力。
4.然而,通过交警人员管理来解决交通拥堵的方式,需要投入大量人力,会造成人力资源的浪费;而通过道路拓宽或新建等方式解决交通拥堵问题,会造成非拥堵时段下道路资源的浪费。
技术实现要素:
5.本技术提供一种交通信号灯系统、控制方法、装置、介质及程序产品,用以解决现有的解决交通拥堵的方式存在的浪费人力资源、浪费非拥堵时段下的道路资源的问题。
6.第一方面,本技术提供一种交通信号灯系统,包括至少一个交通信号灯装置,每个所述交通信号灯装置包括支架组件、信号灯组件、无线通信组件、控制器和雷达监测组件;
7.所述支架组件包括固定杆体和移动支架,所述信号灯组件包括至少一个信号灯单元,所述信号灯单元设置在所述固定杆体的面向所在路口的移动对象移动方向的侧面;
8.所述移动支架的第一端铰接所述固定杆体的侧方,且所述移动支架的第二端可相对所述固定杆体旋转至展开位置或者折叠位置,所述雷达监测组件设置于所述移动支架上;
9.所述信号灯单元、所述雷达监测组件、所述无线通信组件均与所述控制器电连接;
10.所述控制器用于:
11.根据所述雷达监测组件在监测区域内发射的雷达信号,获取落入所述交通信号灯装置各监测子区域内的移动对象的数量;各所述监测子区域的中心均为交通信号灯装置所在位置、且均位于所述监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过所述交通信号灯装置所在路口的移动对象的目标数量;
12.向交通控制平台发送所述各监测子区域内的移动对象的数量;
13.接收所述交通控制平台基于所述各监测子区域内的移动对象的数量,返回的信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间;
14.根据所述信号灯控制指令所指示的红绿灯切换时间,控制所述信号灯单元所显示的交通信号灯的颜色。
15.可选地,当所述信号灯单元为两个时,两个所述信号灯单元分别对应设置在所述固定杆体的分别面向所述路口的不同移动对象移动方向的相对两侧面;
16.可选地,所述信号灯单元为两个,所述固定杆体具有第一安装面和相对设置的两个第二安装面,所述第一安装面和所述第二安装面均位于所述固定杆体侧方,且所述第一安装面位于两个所述第二安装面之间;
17.两个所述信号灯单元分别设置于不同的所述第二安装面上,所述移动支架设置于所述第一安装面上。
18.可选地,所述第一安装面上开设有沿竖直方向延伸的避让槽,所述移动支架的第一端通过水平转轴铰接于所述固定杆体的顶部,所述移动支架的第二端位于所述折叠位置时,所述移动支架收容于所述避让槽内。
19.可选地,所述移动支架的第二端旋转至所述展开位置时,所述移动支架处于水平位置。
20.可选地,所述第二安装面的中部具有安装槽,所述安装槽由所述固定杆体的顶部沿竖直方向延伸至所述固定杆体的底部,所述信号灯单元嵌设在所述安装槽内,且所述信号灯单元的形状与所述安装槽的形状相匹配。
21.可选地,所述信号灯单元为灯条,所述灯条的表面和所述第二安装面齐平。
22.可选地,所述支架组件的底部设置有固定组件或移动组件。
23.可选地,所述交通信号灯装置的数量为至少两个,不同所述交通信号灯装置之间相互拼接并具有不同的朝向,以面向所述路口的不同方向。
24.可选地,所述移动交通信号灯装置为至少三个,至少三个所述交通信号灯装置呈中心对称排列并相互拼接。
25.可选地,所述固定杆体的侧方设置有用于和其它所述交通信号灯装置配合连接的卡扣。
26.第二方面,本技术提供一种交通信号灯控制方法,所述方法应用于交通信号灯装置,所述方法包括:
27.根据雷达监测组件在监测区域内发射的雷达信号,获取落入所述交通信号灯装置各监测子区域内的移动对象的数量;各所述监测子区域的中心均为交通信号灯装置所在位置、且均位于所述监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过所述交通信号灯装置所在路口的移动对象的目标数量;
28.向交通控制平台发送所述各监测子区域内的移动对象的数量;
29.接收所述交通控制平台基于所述各监测子区域内的移动对象的数量,返回的信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间;
30.根据所述信号灯控制指令所指示的红绿灯切换时间,控制所述交通信号灯装置所显示的交通信号灯的颜色。
31.可选地,所述根据所述雷达监测组件在监测区域内发射的雷达信号,获取落入所述交通信号灯装置各监测子区域内的移动对象的数量,包括:
32.利用所述雷达监测组件在监测区域内发射的雷达信号,获取所述监测区域内的移动对象的移动数据;
33.根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的
移动对象的数量。
34.可选地,所述根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量,包括:
35.根据所述移动对象的移动数据,确定所述移动数据是否满足预设事件;
36.若满足所述预设事件,则根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量;
37.所述预设事件为下述任一项:
38.所述移动对象的移动数据表征所述移动对象与所述交通信号灯装置的第一距离小于或等于预设阈值;
39.所述移动对象的移动数据表征所述第一距离大于或等于第二预设阈值;其中,所述第二预设阈值大于所述预设阈值;
40.所述移动对象的移动数据表征所述第一距离大于第二距离;其中,所述第二距离为所述移动对象与目标路径上所述交通信号灯装置相邻的交通信号灯装置的距离。
41.可选地,所述根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量,包括:
42.根据所述移动对象的移动数据,获取所述移动对象的位置和移动参数;所述移动参数包括:移动方向和/或移动速度;
43.根据所述移动对象的位置和移动参数,以及,各监测子区域的距离门限值,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量;其中,所述距离门限值为各监测子区域至所述交通信号灯装置的最大距离。
44.可选地,所述根据所述移动对象的位置和移动参数,以及,各监测子区域的距离门限值,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量,包括:
45.根据所述移动对象的位置和移动参数,以及,各监测子区域的距离门限值,确定落入所述交通信号灯装置各监测子区域内的移动对象的初始数量;
46.利用预训练的第一校准模型,对根据落入所述交通信号灯装置各监测子区域内的移动对象的初始数量进行校准,得到落入所述交通信号灯装置各监测子区域内的移动对象的数量;其中,所述第一校准模型为利用样本移动对象的位置、移动参数得到的各监测子区域内的移动对象的样本初始数量,以及,各监测子区域内的移动对象的样本实际数量进行训练得到的。
47.可选地,所述根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量之前,还包括:
48.根据所述雷达监测组件的探测距离、探测速度、所述交通信号灯的红绿灯切换时间,确定交通信号灯装置所包括的监测子区域的数量,以及,各所述监测子区域的大小。
49.第三方面,本技术提供一种交通信号灯控制方法,所述方法应用于交通控制平台,所述方法包括:
50.接收来自目标路径上的多个交通信号灯装置的各监测子区域内的移动对象的数量;所述交通信号灯装置的各所述监测子区域的中心均为所述交通信号灯装置所在位置、且均位于所述交通信号灯装置的监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过各所述交通信号灯装置所在路口的移动对象的目标数量;
51.根据所述多个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述多个交通信号灯装置形成交通绿波带时,各所述多个交通信号灯装置的交通信号灯的红绿灯切换时间;
52.根据各所述交通信号灯装置的交通信号灯的红绿灯切换时间,向各所述交通信号灯装置发送信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间。
53.可选地,所述根据所述多个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述多个交通信号灯装置形成交通绿波带时,各所述多个交通信号灯装置的交通信号灯的红绿灯切换时间,包括:
54.根据所述多个交通信号灯装置的第一个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述第一个交通信号灯装置的红绿灯切换时间;
55.根据所述第一个交通信号灯装置的红绿灯切换时间,以及,其他交通信号灯装置的各监测子区域内的移动对象的数量,确定所述其他交通信号灯装置的红绿灯切换时间,以使所述多个交通信号灯装置形成交通绿波带。
56.可选地,所述根据所述第一个交通信号灯装置的红绿灯切换时间,以及,其他交通信号灯装置的各监测子区域内的移动对象的数量,确定所述其他交通信号灯装置的红绿灯切换时间,包括:
57.根据所述第一个交通信号灯装置的红绿灯切换时间、所述第一个交通信号灯装置与所述其他交通信号灯装置之间的距离,以及,移动对象的移动速度,确定所述其他交通信号灯装置的红绿灯切换时间中从红灯切换至绿灯的第一时间;
58.根据所述其他交通信号灯装置的各监测子区域内的移动对象的数量,确定所述其他交通信号灯装置的绿灯持续时长;
59.将所述第一时间和所述绿灯持续时长相加,得到所述其他交通信号灯装置的红绿灯切换时间中从绿灯切换至红灯的第二时间。
60.可选地,所述根据所述其他交通信号灯装置的各监测子区域内的移动对象的数量,确定所述其他交通信号灯装置的绿灯持续时长,包括:
61.若所述其他交通信号灯装置的各监测子区域内的移动对象的数量小于或等于预设数量,则将所述预设持续时长作为所述其他交通信号灯装置的绿灯持续时长;
62.或者,
63.若所述其他交通信号灯装置的各监测子区域内的移动对象的数量大于预设数量,则根据其他交通信号灯装置的各监测子区域内的移动对象的数量,获取延长时长;其中,所述延长时长与所述各监测子区域内的移动对象的数量正相关;
64.若所述延长时长小于预设最大时长,则将所述延长时长与预设持续时长相加,得到所述其他交通信号灯装置的绿灯持续时长;或者,若所述延长时长大于或等于所述预设最大时长,则将所述预设最大时长与所述预设持续时长相加,得到所述其他交通信号灯装置的绿灯持续时长。
65.第四方面,本技术提供一种交通信号灯控制装置,所述控制装置应用于交通信号灯装置,所述控制装置包括:
66.获取模块,用于根据雷达监测组件在监测区域内发射的雷达信号,获取落入所述
交通信号灯装置各监测子区域内的移动对象的数量;各所述监测子区域的中心均为交通信号灯装置所在位置、且均位于所述监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过所述交通信号灯装置所在路口的移动对象的目标数量;
67.发送模块,用于向交通控制平台发送所述各监测子区域内的移动对象的数量;
68.接收模块,用于接收所述交通控制平台基于所述各监测子区域内的移动对象的数量,返回的信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间;
69.控制模块,用于根据所述信号灯控制指令所指示的红绿灯切换时间,控制所述交通信号灯装置所显示的交通信号灯的颜色。
70.第五方面,本技术提供一种交通信号灯控制装置,所述装置应用于交通控制平台,所述装置包括:
71.接收模块,用于接收来自目标路径上的多个交通信号灯装置的各监测子区域内的移动对象的数量;所述交通信号灯装置的各所述监测子区域的中心均为所述交通信号灯装置所在位置、且均位于所述交通信号灯装置的监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过各所述交通信号灯装置所在路口的移动对象的目标数量;
72.确定模块,用于根据所述多个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述多个交通信号灯装置形成交通绿波带时,各所述多个交通信号灯装置的交通信号灯的红绿灯切换时间;
73.发送模块,用于根据各所述交通信号灯装置的交通信号灯的红绿灯切换时间,向各所述交通信号灯装置发送信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间。
74.第六方面,本技术提供一种电子设备,所述电子设备包括:至少一个处理器和存储器;
75.所述存储器存储计算机执行指令;
76.所述至少一个处理器执行所述存储器存储的计算机执行指令,使得所述电子设备执行第二方面或第三方面中任一项所述的方法。
77.第七方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现第二方面或第三方面中任一项所述的方法。
78.第八方面,本技术提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现第二方面或第三方面中任一项所述的方法。
79.本技术提供的交通信号灯系统、控制方法、装置、介质及程序产品,能够根据所述雷达监测组件在监测区域内发射的雷达信号,获取落入所述交通信号灯装置各监测子区域内的移动对象的数量,然后基于该数量确定各装置的红绿灯切换时间,并按照确定的红绿灯切换时间控制各交通信号灯装置的交通信号灯的颜色,从而实现随移动对象的数量灵活调整各交通信号灯装置的红绿灯切换时间,实现交通绿波带,缓解道路交通拥堵问题。
附图说明
80.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施
例,并与说明书一起用于解释本技术的原理。
81.图1是本技术实施例提供的一种交通信号灯系统的结构示意图;
82.图2(a)是本技术实施例提供的第一种交通信号灯装置的结构示意图;
83.图2(b)是本技术实施例提供的第二种交通信号灯装置的结构示意图;
84.图2(c)是本技术实施例提供的第三种交通信号灯装置的结构示意图;
85.图2(d)是本技术实施例提供的第四种交通信号灯装置的结构示意图;
86.图2(e)是本技术实施例提供的一种交通信号灯装置的固定组件的结构示意图;
87.图3(a)是本技术实施例提供的第一种交通信号灯装置的应用场景示意图;
88.图3(b)是本技术实施例提供的第二种交通信号灯装置的应用场景示意图;
89.图3(c)是本技术实施例提供的第三种交通信号灯装置的应用场景示意图;
90.图4是本技术实施例提供的一种交通信号灯控制方法的流程示意图;
91.图5是本技术实施例提供的一种交通信号灯装置的监测子区域设置示意图;
92.图6是本技术实施例提供的一种交通信号灯装置形成的交通绿波带示意图;
93.图7是本技术实施例提供的一种交通信号灯控制装置的结构示意图;
94.图8是本技术实施例提供的另一种交通信号灯控制装置的结构示意图;
95.图9是本技术实施例提供的一种电子设备的结构示意图。
96.附图标记说明:
97.100
‑
交通信号灯装置;10
‑
支架组件;11
‑
固定杆体;111
‑
第一安装面;112
‑
第二安装面;113
‑
安装槽;12
‑
移动支架;20
‑
信号灯组件;21
‑
信号灯单元;30
‑
无线通信组件;40
‑
控制器;50
‑
雷达监测组件;60
‑
交通控制平台;70
‑
固定组件;80
‑
移动组件。
98.通过上述附图,已示出本技术明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本技术构思的范围,而是通过参考特定实施例为本领域技术人员说明本技术的概念。
具体实施方式
99.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
100.首先对本技术所涉及的名词进行解释:
101.交通绿波带:是指根据判断移动对象即将使用的交通信号灯,灵活地调整目标路径上各路口交通信号灯的红绿灯切换时间,并使各路口绿灯的亮灯时长适应性地延长或缩短,从而使移动对象在到达该目标路径上的各个路口时都能遇上绿灯,无需等待既可直接通行的交通现象。
102.其中,移动对象包括了车辆和行人等交通参与者。
103.红绿灯切换时间:是指交通信号灯切换为红灯、和切换为绿灯的时间点。通过调整红绿灯切换时间,可以调整绿灯的亮灯时长和红灯的亮灯时长。
104.应理解,本技术提供的交通信号灯控制方法也可以应用于调整信号灯的黄灯切换时间和黄灯的亮灯时长。示例性地,本技术实施例是以交通信号灯的黄灯的亮灯时长固定,
通过调整红绿灯切换时间,实现交通绿波带为例进行说明的。
105.在本技术实施例中,可以将黄灯的亮灯时长加到绿灯的亮灯时长中,从而将黄灯理解为绿灯即将结束时的特殊阶段。下述实施例中所述的将交通信号灯装置从绿灯切换至红灯的时间,可以理解为将该装置从黄灯切换至红灯的时间。
106.交通道路,尤其是城市中的交通道路,面临着越来越突出的交通拥堵问题。目前,解决交通拥堵问题的方式是在拥堵时段的拥堵路段安排交警人员管理交通秩序、疏通拥堵,或者是通过拓宽拥堵路段道路、铺设并行道路等方式来减小拥堵路段的通行压力。
107.区别于现有技术的方案,本技术提供了一种应用于交通信号灯装置的交通信号灯控制方法。该方法能够根据雷达监测组件在监测区域内发射的雷达信号,获取落入交通信号灯装置各监测子区域内的移动对象的数量,然后基于该数量灵活调整各装置的红绿灯切换时间,从而使各交通信号灯装置的交通信号灯形成交通绿波带,缓解道路交通拥堵问题。该方法通过灵活调整交通信号灯装置的红绿灯切换时间即可缓解道路交通拥堵问题,无需交警人员参与,也无需扩建道路,从而节省了人力资源和道路资源。
108.下面以具体地实施例对本技术的技术方案以及本技术的技术方案如何解决上述技术问题进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。下面将结合附图,对本技术的实施例进行描述。
109.图1是本技术实施例提供的一种交通信号灯系统的结构示意图。如图1所示,本技术的交通信号灯系统中的每个交通信号灯装置100可以包括:支架组件10、移动组件80、信号灯组件20、无线通信组件30、控制器40和雷达监测组件50;
110.所述支架组件10包括固定杆体11和移动支架12,所述信号灯组件20包括两个信号灯单元21,所述信号灯单元21设置在所述固定杆体11的面向所述路口的移动对象移动方向的侧面;可选地,当信号灯单元21为两个时,两个所述信号灯单元21分别对应设置在所述固定杆体11的分别面向所述路口的不同移动对象移动方向的相对两侧面;
111.所述移动支架12的第一端铰接所述固定杆体11的侧方,且所述移动支架12的第二端可相对所述固定杆体11旋转至展开位置或者折叠位置,所述雷达监测组件50设置于所述移动支架12上;
112.所述信号灯单元21、所述雷达监测组件50、所述无线通信组件30均与所述控制器40电连接;
113.所述控制器40用于:根据所述雷达监测组件50在监测区域内发射的雷达信号,获取落入所述交通信号灯装置100各监测子区域内的移动对象的数量;各所述监测子区域的中心均为交通信号灯装置100所在位置、且均位于所述监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过所述交通信号灯装置100所在路口的移动对象的目标数量;
114.向交通控制平台60发送所述各监测子区域内的移动对象的数量;
115.接收所述交通控制平台60基于所述各监测子区域内的移动对象的数量,返回的信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置100的红绿灯切换时间;
116.根据所述信号灯控制指令所指示的红绿灯切换时间,控制所述信号灯单元21所显示的交通信号灯的颜色。
117.应理解,图1是以无线通信组件30和雷达监测组件50均设置在移动支架12上为例
进行说明的,但是本技术不限制无线通信组件30和雷达监测组件50设置在交通信号灯装置100上的具体位置,交通信号灯装置100上任一能够实现与控制器40电连接的位置都可以设置无线通信组件30和雷达监测组件50。
118.并且,无线通信组件30和雷达监测组件50既可以设置在交通信号灯装置100的同一组件上,也可以分开设置于不同组件上。例如,可以将无线通信组件30设置在安装槽113内;可以将雷达监测组件50设置在移动支架12上。
119.另外,图1是以控制器40设置在交通信号灯装置100外部为例进行说明的,本技术提供的控制器40也可以是设置在交通信号灯装置100的内部。
120.上述方案中,一方面,交通信号灯装置100的移动支架12一端与固定杆体11的侧方铰接,另一端可以绕固定杆体11旋转至展开位置或者折叠位置,使得移动支架12可以根据需求展开或折叠。当需要对该交通信号灯装置100进行搬运或挪动时,可以将移动支架12折叠靠拢至固定杆体11侧方,节省运输空间。当需要移动支架12上的无线通信组件30和/或雷达监测组件50工作时,只需将移动支架12抬高至展开位置即可。
121.由于当前的交通信号灯装置都是固定在地面上、不可移动的,交通信号灯装置的支架和信号灯之间也是固定连接的。当遇到道路临时施工、某路段封路等特殊情况,需要暂时挪开交通信号灯装置时,固定在地面上的交通信号灯装置不利于拆卸和搬运操作。而本技术提供的交通信号灯装置100还能够折叠收拢移动支架12,针对岔口数量不同的多种路口,多个交通信号灯装置能够实现适应性地拼接和拆卸,更便于拆卸和搬运操作。
122.示例性地,上述移动支架12的展开或折叠动作,可以是用户手动进行的,也可以是用户通过操作移动支架12展开或折叠的控制开关实现的,该控制开关可以设置在交通信号灯装置100上任一位置。上述移动支架12的展开或折叠动作,还可以是控制器40基于用户输入的展开或折叠的预设时间点,在相应的预设时间点自动控制移动支架12的展开或折叠。或者,上述移动支架12的展开或折叠动作,还可以是控制器40在接收到来自交通控制平台60的展开或折叠移动支架12的控制指令后,自动控制移动支架12的展开或折叠。
123.另一方面,信号灯单元21、雷达监测组件50、无线通信组件30均与控制器40电连接,使得控制器40可以实时获取到雷达监测组件50采集的监测区域内的移动对象的移动数据,并根据该移动数据确定落入各监测子区域内的移动对象的数量。控制器40还可以通过无线通信组件30将该数量发送给交通控制平台60。交通控制平台60可以根据上报的移动对象的数量,计算得到各个交通信号灯装置100形成交通绿波带时,各个交通信号灯装置100的红绿灯切换时间,并生成信号灯控制指令。交通控制平台60还可以通过交通信号灯装置100的无线通信组件30,将生成的信号灯控制指令分发给各个控制器40。控制器40在接收信号灯控制指令后,可以根据该信号灯控制指令,控制信号灯单元21显示该信号灯控制指令所指示的颜色。
124.关于控制器40是具体如何将各监测子区域内的移动对象的数量发送给交通控制平台60,以及交通控制平台60是如何基于该数量计算得到各个交通信号灯装置100的红绿灯切换时间的,可以参见后续的方法实施例。
125.示例性地,所述信号灯单元21为两个,所述固定杆体11具有第一安装面111和相对设置的两个第二安装面112,所述第一安装面111和所述第二安装面112均位于所述固定杆体11侧方,且所述第一安装面111位于两个所述第二安装面112之间;两个所述信号灯单元
21分别设置于不同的所述第二安装面112上,所述移动支架12设置于所述第一安装面111上。
126.应理解,当信号灯单元21为两个时,两个信号灯单元21显示的颜色可以相同,也可以不同。此外,两个信号灯单元21也可以一个显示,一个不显示,即,只使用其中一个信号灯单元21。具体使用一个还是两个信号灯单元21,可以根据需求确定。例如,当单个交通信号灯装置100设置在路口侧方,用于为行人提供交通信号灯指示信息时,可以只使用一个信号灯单元21。
127.将两个信号灯单元21分别设置于不同的第二安装面112上,使得交通信号灯装置100可以双面显示信号灯颜色,增大了其空间利用率。同时,双面设置的信号灯单元21也可以使交通信号灯装置100在拼接组成不同结构时不受安装方向的限制,更便于拼接组装。
128.其中,不同结构是指,至少两个交通信号灯装置100拼接成的、适应不同岔口数量路口的使用需求的各种结构。例如,图2(a)、图2(b)、图2(c)、图2(d)中所示的结构。
129.示例性地,当所述信号灯单元21为一个时,所述固定杆体11具有第一安装面111和第二安装面112,所述第一安装面111和所述第二安装面112均位于所述固定杆体11侧方,且所述第一安装面111与所述第二安装面112相邻;所述信号灯单元21设置于所述第二安装面112上,所述移动支架12设置于所述第一安装面111上。
130.示例性地,所述第一安装面111上开设有沿竖直方向延伸的避让槽,所述移动支架12的第一端通过水平转轴铰接于所述固定杆体11的顶部。所述移动支架12的第二端位于所述折叠位置时,所述移动支架12收容于所述避让槽内,移动支架12的第二端位于折叠位置时交通信号灯装置100的结构示意图可以参见图2(a)。
131.示例性地,所述移动支架12的第二端旋转至所述展开位置时,所述移动支架12可以处于水平位置,移动支架12旋转展开至水平位置时交通信号灯装置100的结构示意图可以参见图1。或者,移动支架12的第二端旋转至所述展开位置时,所述移动支架12也可以处于其他满足用户需求的位置。
132.示例性地,移动支架12的第二端旋转至所述展开位置时,移动支架12的第二端还可以以移动支架12的第一端为中心,在移动支架12的展开位置所处的平面上移动。
133.将移动支架12通过水平转轴铰接于固定杆体11的顶部,可以保证移动支架12相对固定杆体11转动至展开位置后,不会遮挡地面上用户的视野。设置避让槽,可以保证移动支架12处于折叠位置时,不会凸出于第一安装面111上,从而使移动支架12不易受到磕碰损坏,更好地适应搬运场景的需要。
134.在本技术实施例中,所述第二安装面112的中部具有安装槽113,所述安装槽113由所述固定杆体11的顶部沿竖直方向延伸至所述固定杆体的底部,所述信号灯单元21嵌设在所述安装槽113内,且所述信号灯单元21的形状与所述安装槽113的形状相匹配。所述信号灯单元21为灯条,所述灯条的表面和所述第二安装面112齐平,便于保护灯条不受磕碰。
135.需要说明的是,信号灯单元21的形状与安装槽113的形状相匹配,指的是信号灯单元21安装在该安装槽113内后,不会滑落。而信号灯单元21的长度并不一定与该安装槽113的长度相等。例如,信号灯单元21的长度可以是该安装槽113的长度的一半,此时信号灯单元21可以安装在该安装槽113上半段。本技术对此不加限制。
136.示例性地,当其中一个信号灯单元21不使用时,可以从安装槽113内取下该信号灯
单元21,再选用一块与安装槽113的形状相匹配的防护板,嵌设在安装槽113内。或者,还可以从安装槽113内取下该信号灯单元21后,让安装槽113裸露在外。
137.在第二安装面112的中部设置安装槽113,再将信号灯单元21嵌设在安装槽113中,第二安装面112上灯条的两边就会空余两个不显示交通信号灯颜色的过渡面,这两个过渡面可以将两个信号灯单元21区隔开,防止交通信号灯串色,从而防止用户误判交通信号灯的颜色。
138.其中,交通信号灯串色是指,用户从不同角度观察交通信号灯装置100的交通信号灯颜色时,同时看到交通信号灯装置100的两个信号灯单元21所显示的两个颜色。
139.示例性地,所述支架组件10的底部设置有移动组件80,所述移动组件80可以用于将所述交通信号灯装置100可移动的设置在所述路口的中心。或者,所述支架组件10的底部还可以设置有如图2(e)所示的固定组件70,该固定组件70可以用于将所述交通信号灯装置100固定于路口侧方。
140.应理解,固定组件70或移动组件80可以固定连接在支架组件10的底部,例如,焊接连接(以固定杆体11、固定组件70和移动组件80均选用金属材料制成为例)。或者,固定组件70或移动组件80也可以可拆卸地连接在支架组件10的底部,例如,螺纹连接。
141.示例性地,以固定杆体11选用金属材料制成为例,固定组件70可以是一个如图2(e)所示的焊接在固定杆体11下端的法兰盘和与法兰盘上孔眼数量一致的螺栓,当固定组件70由上述两部分组成时,可以配合一个焊接在地面下的预埋地脚螺栓上的法兰盘实现与地面的固定连接。
142.继续以固定杆体11选用金属材料制成为例,如图1所示,移动组件80可以是一个焊接有一组滚轮的法兰盘。示例性地,该滚轮可以是带锁扣的万向轮,当按下万向轮上的锁扣时,可以锁住该滚轮。
143.设置固定组件70或移动组件80,提供两种交通信号灯装置100与地面的连接方式,增大了交通信号灯装置100设置的灵活性。
144.示例性地,所述交通信号灯装置100的数量为至少两个,不同所述交通信号灯装置100之间相互拼接并具有不同的朝向,以面向所述路口的不同方向。
145.例如,当交通信号灯装置100的数量为两个时,可以使两个交通信号灯装置100间成90度拼接为如图2(b)中所示的结构。示例性地,当交通信号灯系统的结构为如图2(b)中所示的结构时,该交通信号灯系统可以应用于如图3(a)中所示的两岔口、如图3(b)中所示的三岔口以及如图3(c)中所示的四岔口的路口侧方。
146.可选地,如图2(c)、图2(d)所示,在本技术实施例中,所述交通信号灯装置100为至少三个时,至少三个所述交通信号灯装置100呈中心对称排列并相互拼接。
147.示例性地,当交通信号灯系统的结构为如图2(c)所示的结构时,可以应用于如图3(b)中所示的三岔口路口中心。当交通信号灯系统的结构为如图2(d)所示的结构时,可以应用于如图3(c)中所示的四岔口路口中心。
148.示例性地,所述固定杆体11的侧方设置有用于和其它所述交通信号灯装置100配合连接的卡扣。
149.例如,可以在交通信号灯装置100上与第一安装面111相对的侧面上并排设置一对子母卡扣,该对子母卡扣的底部与交通信号灯装置100转动连接(例如,铰接)。当两个交通
信号灯装置100需要进行拼接时,将两对子母卡扣对准后卡紧,就能实现拼接。
150.应理解,为保证多个交通信号灯装置100能够顺利地组合成适应不同岔口数量的路口的交通信号灯系统,各个交通信号灯装置100上的卡扣应设置于同一高度。本技术不限制卡扣的种类,能够满足两个以上交通信号灯装置100的拼接需求的卡扣类型都可以用于本技术提供的交通信号灯装置100。
151.本技术实施例提供的交通信号灯装置100,可以折叠收拢移动支架12,针对不同路口可以适应性地拼接成各种结构,还可以双面显示信号灯颜色并且防止串色。该装置具有更高的灵活性,更便于搬运。
152.下面基于图1所示的交通信号灯控制系统,对本技术提供的交通信号灯控制方法进行说明。
153.应理解,虽然本技术方法实施例是以图1所示的交通信号灯装置结构为例进行说明的,但是本技术提供的交通信号灯控制方法并不以此结构为限。任一能够获取移动对象的移动数据、确定落入交通信号灯装置各监测子区域内的移动对象的数量并与交通控制平台通信的装置,均能够适用于本技术提供的交通信号灯控制方法。
154.图4是本技术实施例提供的一种交通信号灯控制方法的流程示意图。如图4所示,本技术该方法可以包括:
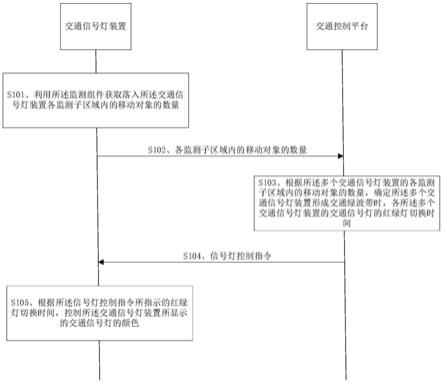
155.s101,交通信号灯装置根据所述雷达监测组件在监测区域内发射的雷达信号,获取落入所述交通信号灯装置各监测子区域内的移动对象的数量。
156.其中,移动对象是指行人、车辆等道路交通的参与者。
157.示例性地,该雷达监测组价可以是毫米波雷达监测组件,例如阵列优化后的多进多出(multiple input multiple output,mimo)毫米波雷达监测组件。
158.作为第一种可能的实现方式,交通信号灯装置可以先利用移动对象反射回监测组件的雷达信号,采集监测区域内的移动对象的移动数据,再根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量。
159.其中,移动数据是指,移动对象至雷达监测组件的距离(即移动对象至交通信号灯装置的距离)、移动对象的方位角等可以用于获取移动对象的移动速度、移动方向的数据。
160.示例性地,交通信号灯装置可以利用雷达监测组件发射的雷达信号,进行波达方向(direction of arrival,doa)估计,获取该组件的监测范围内的移动对象的移动数据。
161.关于如何进行doa估计以获取移动对象至雷达监测组件的距离、移动对象的方位角等数据,可以参见现有技术,在此不再赘述。
162.示例性地,在该实现方式下,雷达监测组件可以周期性地对移动对象进行监测。例如,雷达监测组件可以以480ms为周期进行监测。为保证监测结果的准确性,在不考虑雷达监测组件的信令传输负荷的情况下,可以缩短该的检测周期。
163.作为第二种可能的实现方式,交通信号灯装置可以先利用移动对象上报的雷达信号监测结果,获取该组件的监测范围内的各移动对象与交通信号灯装置之间的距离,再根据该距离,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量。
164.示例性地,处于雷达监测组件监测范围内的移动对象可以监测到该雷达监测组件的雷达信号强度,并将该雷达信号强度信息上报给控制器。控制器可以基于所有移动对象上报的雷达信号强度信息,计算出各个移动对象与交通信号灯装置之间的距离。示例性地,
控制器可以根据样本移动对象在交通信号灯装置的雷达监测组件监测范围内的不同位置,以及对应位置的雷达信号强度信息,得到移动对象至交通信号灯装置的距离和雷达信号强度之间的经验关系,再通过该经验关系来计算各个移动对象与交通信号灯装置之间的距离。
165.在该实现方式下,通过移动对象向控制器上报雷达信号强度信息的方式获取各个移动对象与交通信号灯装置之间的距离,雷达监测组件不需要周期性地采集监测区域内的移动对象的移动数据,减轻了雷达监测组件的信令传输负荷。
166.在利用所述雷达监测组件在监测区域内发射的雷达信号,获取所述监测区域内的移动对象的移动数据之后,交通信号灯装置可以根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量。
167.其中,各所述监测子区域的中心均为交通信号灯装置所在位置、且均位于所述监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过所述交通信号灯装置所在路口的移动对象的目标数量。
168.示例性地,控制器可以根据所述雷达监测组件的探测距离、探测速度、所述交通信号灯的红绿灯切换时间,确定交通信号灯装置所包括的监测子区域的数量,以及,各所述监测子区域的大小。示例性地,雷达监测组件的探测距离越远、交通信号灯的红绿灯切换时间越长,则交通信号灯装置所包括的监测子区域的数量可以越少,各监测子区域的大小也可以越大。其中,雷达监测组件的探测速度指的是其能够监测到的移动对象的最大移动速度。
169.示例性地,当雷达监测组件的探测距离为l(单位为米)、探测速度为v(单位为米/秒)、交通信号灯的红灯亮10s后切换为绿灯、绿灯亮10s后切换为红灯时,控制器可以设置交通信号灯装置所包括的监测子区域为如图5所示的三个,分别为第一监测子区域、第二监测子区域和第三监测子区域。
170.第一监测子区域半径r1=v
×
floor(l/v);第二监测子区域半径r2=v
×
1/2floor(l/v);第三监测子区域半径r3=v
×
1/4floor(l/v)。
171.其中,v表示移动对象在该交通信号灯装置的雷达监测组件的探测距离范围内移动的平均速度,v的值可以根据样本移动对象的移动数据获得;l/v表示雷达监测组件能够监测到的、移动对象从雷达监测组件探测范围的最远处到达该交通信号灯装置的最短时间;floor(l/v)表示将该最短时间向下取整。应理解,上述公式是以第二监测子区域半径系数为1/2、第三监测子区域半径系数为1/4进行的示例性说明,具体实现时,第二监测子区域半径系数和第三监测子区域半径系数可以根据雷达监测组件的探测距离、探测速度、交通信号灯的红绿灯切换时间等做出相应调整。
172.应理解,图5是以各监测子区域均为圆形区域为例进行说明的,但是本技术中不限制各监测子区域的形状,交通信号灯装置可以根据其需要监测的移动对象与其自身的相对位置确定该形状。
173.示例性地,控制器可以根据所述移动对象的移动数据,获取所述移动对象的位置和移动参数。
174.其中,移动参数包括:移动方向和/或移动速度。
175.示例性地,控制器可以基于雷达监测组件测量得到的移动对象至雷达监测组件的距离,获得移动对象的位置;控制器可以基于雷达监测组件测量得到的移动对象至雷达监
测组件的距离在一定时间段内的变化值,获得移动对象的移动速度;控制器可以基于雷达监测组件测量得到的移动对象的方位角,获得移动对象的移动方向。
176.示例性地,控制器在获取到移动对象的位置和移动参数后,可以根据所述移动对象的位置和移动参数,以及,各监测子区域的距离门限值,确定落入所述交通信号灯装置各监测子区域内的移动对象的初始数量。
177.其中,所述距离门限值可以为各监测子区域至所述交通信号灯装置的最大距离,或者,也可以是小于各监测子区域至所述交通信号灯装置的最大距离的任一值。
178.示例性地,以交通信号灯装置包括三个监测子区域,且第一监测子区域、第二监测子区域和第三监测子区域是以交通信号灯装置为圆心、半径分别为250m、150m和50m的圆形区域为例,该距离门限值也可以分为第一距离门限值、第二距离门限值和第三距离门限值,且第一距离门限值为250m、第二距离门限值为150m、第三距离门限值为50m。
179.作为一种可能的实现方式,控制器可以根据所述移动对象的移动数据,确定所述移动数据是否满足预设事件。若满足所述预设事件,则根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的初始数量。
180.示例性地,上述预设事件可以为下述任一项:
181.事件1:所述移动对象的移动数据表征所述移动对象与所述交通信号灯装置的第一距离小于或等于预设阈值;
182.事件2:所述移动对象的移动数据表征所述第一距离大于或等于第二预设阈值;其中,所述第二预设阈值大于所述预设阈值;
183.事件3:所述移动对象的移动数据表征所述第一距离大于第二距离;其中,所述第二距离为所述移动对象与目标路径上所述交通信号灯装置相邻的交通信号灯装置的距离。
184.以该交通信号灯装置作为移动对象在该目标路径上遇到的第一个交通信号灯装置为例,事件1可以说明:移动对象已经开始使用目标路径上与该交通信号灯装置相邻的下一个交通信号灯装置;事件2可以说明移动对象即将离开该交通信号灯装置;事件3可以说明移动对象已经离开该交通信号灯装置,并即将到达与该交通信号灯装置相邻的下一个交通信号灯装置。
185.示例性地,在获取到落入所述交通信号灯装置各监测子区域内的移动对象的初始数量后,控制器还可以利用预训练的第一校准模型,对根据落入所述交通信号灯装置各监测子区域内的移动对象的初始数量进行校准,得到落入所述交通信号灯装置各监测子区域内的移动对象的数量。
186.其中,所述第一校准模型为利用样本移动对象的位置、移动参数得到的各监测子区域内的移动对象的样本初始数量,以及,各监测子区域内的移动对象的样本实际数量进行训练得到的。
187.例如,第一校准模型可以是采用遗传算法优化的三层bp神经网络,利用各监测子区域内的移动对象的样本初始数量和移动对象的样本实际数量作为训练数据,进行神经网络训练后得到的。
188.示例性地,三层bp神经网络中的隐含层神经网络传递函数可以采用s型正切函数tansig函数;输出层神经网络传递函数可以采用s型对数函数logsig函数。训练函数trainlm函数可以利用列文伯格
‑
马夸尔特(levenberg
‑
marquardt,lm)算法,适应度函数可
以采用排序的适应度分配函数ranking函数。选择算子可以采用随机遍历抽样(stochastic universal sampling,sus),交叉算子可以采用单点交叉算子,变异算子可以采用随机方法。
189.s102,交通信号灯装置向交通控制平台发送所述各监测子区域内的移动对象的数量。
190.相应地,交通控制平台接收该各监测子区域内的移动对象的数量。
191.同时,交通控制平台还接收来自目标路径上的其他所有交通信号灯装置的各监测子区域内的移动对象的数量。其中,目标路径是指形成交通绿波带的交通路径。
192.示例性地,交通信号灯装置的控制器可以通过无线通信组件向交通控制平台发送所述各监测子区域内的移动对象的数量。
193.s103,交通控制平台根据所述多个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述多个交通信号灯装置形成交通绿波带时,各所述多个交通信号灯装置的交通信号灯的红绿灯切换时间。
194.示例性地,交通控制平台可以先根据所述多个交通信号灯装置的第一个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述第一个交通信号灯装置的红绿灯切换时间。
195.例如,当第一个交通信号灯装置的各监测子区域内的移动对象的数量小于或等于预设阈值时,说明该第一个交通信号灯装置无需延长绿灯的亮灯时长,则可以设置将预设的红绿灯切换时间作为该第一个交通信号灯装置的红绿灯切换时间。或者,当第一个交通信号灯装置的各监测子区域内的移动对象的数量大于预设阈值时,说明需要延长该第一个交通信号灯装置的绿灯的亮灯时长。在这种情况下,如果第一个交通信号灯装置的当前信号灯颜色为红色,则可以控制该第一个交通信号灯装置提前切换为绿灯;如果第一个交通信号灯装置的当前信号灯颜色为绿色,则可以控制该第一个交通信号灯装置延长绿灯的亮灯时间。
196.示例性地,在确定第一个交通信号灯装置的红绿灯切换时间之后,交通控制平台可以根据所述第一个交通信号灯装置的红绿灯切换时间、所述第一个交通信号灯装置与所述其他交通信号灯装置之间的距离,以及,移动对象的移动速度,确定所述其他交通信号灯装置的红绿灯切换时间中从红灯切换至绿灯的第一时间。
197.例如,第一个交通信号灯装置从红灯切换至绿灯的时间为t11,从绿灯切换至红灯的时间为t12,则其他交通信号灯装置从红灯切换至绿灯的第一时间t
n1
=t
11
l
n
/v
n
。
198.其中,n表示目标路径上的任一交通信号灯装置,n为大于1的整数;l
n
表示第一个交通信号灯装置任一交通信号灯装置之间的距离;v
n
表示用户在第一个交通信号灯装置和任一交通信号灯装置之间的最大移动速度。v
n
可以根据道路限速确定,也可以根据该用户在第一个交通信号灯装置和任一交通信号灯装置之间的样本移动速度确定。
199.示例性地,交通控制平台还可以根据所述其他交通信号灯装置的各监测子区域内的移动对象的数量,确定所述其他交通信号灯装置的绿灯持续时长,将所述第一时间和所述绿灯持续时长相加,得到所述其他交通信号灯装置的红绿灯切换时间中从绿灯切换至红灯的第二时间t
n2
。
200.一种情况下,若所述任一其他交通信号灯装置的各监测子区域内的移动对象的数
量n
n
大于该任一其他交通信号灯装置的预设数量n
nm
,说明有大量用户即将使用该任一其他交通信号灯装置,而该任一其他交通信号灯装置的绿灯的预设持续时长t
n0
不足以放行所有用户,需要延长该交通信号灯装置的绿灯持续时长。交通控制平台则可以根据其他交通信号灯装置的各监测子区域内的移动对象的数量,获取信号灯时长攀升倍数m,再通过信号灯时长攀升步长ds获取到该任一其他交通信号灯装置的延长时长t
ne
=m
×
ds。
201.其中,攀升倍数m与各监测子区域内的移动对象的数量正相关;信号灯时长攀升步长ds可以是用户自定义设置的,也可以是利用神经网络训练后得到的。
202.示例性地,若该任一其他交通信号灯装置的延长时长t
ne
小于该任一其他交通信号灯装置的预设最大时长t
nm
,则将所述延长时长t
ne
与预设持续时长t
n0
相加,得到该任一其他交通信号灯装置的绿灯持续时长t
n
=t
n0
t
ne
。
203.或者,若所述延长时长t
ne
大于或等于所述预设最大时长t
nm
,则将所述预设最大时长t
nm
与预设持续时长t0相加,得到所述其他交通信号灯装置的绿灯持续时长t
n
=t
n0
t
nm
。
204.另一种情况下,若所述其他交通信号灯装置的各监测子区域内的移动对象的数量n
n
小于或等于预设数量n
nm
,则将所述预设持续时长t
n0
作为所述其他交通信号灯装置的绿灯持续时长t
n
,即t
n
=t
n0
。
205.示例性地,交通控制平台可以根据其他交通信号灯装置的绿灯持续时长t,得到该交通信号灯装置的红绿灯切换时间中从绿灯切换至红灯的第二时间t
n2
=t
n1
t
n
。
206.s104,交通控制平台根据各所述交通信号灯装置的交通信号灯的红绿灯切换时间,向各所述交通信号灯装置发送信号灯控制指令。
207.相应地,交通信号灯装置接收所述交通控制平台基于所述各监测子区域内的移动对象的数量,返回的信号灯控制指令。
208.其中,所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间。
209.示例性地,交通信号灯装置的控制器可以通过无线通信组件接收交通控制平台发送的信号灯控制指令,并获取到该指令所指示的红绿灯切换时间。
210.s105,交通信号灯装置根据所述信号灯控制指令所指示的红绿灯切换时间,控制所述交通信号灯装置所显示的交通信号灯的颜色。
211.例如,当信号灯控制指令指示交通信号灯装置在5s后切换为绿灯、绿灯亮灯时长为20s,控制器在接收到该指令并获取到以上信息后,可以控制交通信号灯装置所显示的交通信号灯的颜色按照以上信息变化。
212.示例性地,如图6所示,采用上述交通信号灯控制方法设置各交通信号灯装置的红绿灯切换时间后,可以使得移动对象到达目标路径(例如,目标路径a)上的每一个交通信号灯装置时都遇上绿灯,无需等待即可通行。
213.本技术实施例提供的交通信号灯控制方法,能够根据雷达监测组件在监测区域内发射的雷达信号,获取落入交通信号灯装置各监测子区域内的移动对象的数量,然后基于该数量确定各装置的红绿灯切换时间,并按照确定的红绿灯切换时间控制各交通信号灯装置的交通信号灯的颜色。该装置能够随移动对象的数量灵活调整各交通信号灯装置的红绿灯切换时间,从而实现交通绿波带,缓解道路交通拥堵问题。
214.图7是本技术实施例提供的一种交通信号灯控制装置的结构示意图。如图7所示,该装置包括:获取模块41、发送模块42、接收模块43和控制模块44。其中:
215.获取模块41,用于根据所述雷达监测组件在监测区域内发射的雷达信号,获取落入所述交通信号灯装置各监测子区域内的移动对象的数量;各所述监测子区域的中心均为交通信号灯装置所在位置、且均位于所述监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过所述交通信号灯装置所在路口的移动对象的目标数量;
216.发送模块42,用于向交通控制平台发送所述各监测子区域内的移动对象的数量;
217.接收模块43,用于接收所述交通控制平台基于所述各监测子区域内的移动对象的数量,返回的信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间;
218.控制模块44,用于根据所述信号灯控制指令所指示的红绿灯切换时间,控制所述交通信号灯装置所显示的交通信号灯的颜色。
219.可选地,所述获取模块41,具体用于:利用所述雷达监测组件在监测区域内发射的雷达信号,获取所述监测区域内的移动对象的移动数据;根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量。
220.可选地,所述获取模块41,具体用于:根据所述移动对象的移动数据,确定所述移动数据是否满足预设事件;若满足所述预设事件,则根据所述移动对象的移动数据,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量;所述预设事件为下述任一项:
221.所述移动对象的移动数据表征所述移动对象与所述交通信号灯装置的第一距离小于或等于预设阈值;
222.所述移动对象的移动数据表征所述第一距离大于或等于第二预设阈值;其中,所述第二预设阈值大于所述预设阈值;
223.所述移动对象的移动数据表征所述第一距离大于第二距离;其中,所述第二距离为所述移动对象与目标路径上所述交通信号灯装置相邻的交通信号灯装置的距离。
224.可选地,所述获取模块41,具体用于:根据所述移动对象的移动数据,获取所述移动对象的位置和移动参数;所述移动参数包括:移动方向和/或移动速度;根据所述移动对象的位置和移动参数,以及,各监测子区域的距离门限值,确定落入所述交通信号灯装置各监测子区域内的移动对象的数量;其中,所述距离门限值为各监测子区域至所述交通信号灯装置的最大距离。
225.可选地,所述获取模块41,具体用于:根据所述移动对象的位置和移动参数,以及,各监测子区域的距离门限值,确定落入所述交通信号灯装置各监测子区域内的移动对象的初始数量;利用预训练的第一校准模型,对根据落入所述交通信号灯装置各监测子区域内的移动对象的初始数量进行校准,得到落入所述交通信号灯装置各监测子区域内的移动对象的数量;其中,所述第一校准模型为利用样本移动对象的位置、移动参数得到的各监测子区域内的移动对象的样本初始数量,以及,各监测子区域内的移动对象的样本实际数量进行训练得到的。
226.本技术提供的交通信号灯控制装置,用于执行前述交通信号灯控制方法实施例中交通信号灯装置的动作,其实现原理与技术效果类似,对此不再赘述。
227.图8是本技术实施例提供的另一种交通信号灯控制装置的结构示意图。
228.如图8所示,该装置包括:接收模块31、确定模块32和发送模块33。其中:
229.接收模块31,用于接收来自目标路径上的多个交通信号灯装置的各监测子区域内
的移动对象的数量;所述交通信号灯装置的各所述监测子区域的中心均为所述交通信号灯装置所在位置、且均位于所述交通信号灯装置的监测区域内;所述各监测子区域内的移动对象的数量用于表征即将通过各所述交通信号灯装置所在路口的移动对象的目标数量;
230.确定模块32,用于根据所述多个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述多个交通信号灯装置形成交通绿波带时,各所述多个交通信号灯装置的交通信号灯的红绿灯切换时间;
231.发送模块33,用于根据各所述交通信号灯装置的交通信号灯的红绿灯切换时间,向各所述交通信号灯装置发送信号灯控制指令;所述信号灯控制指令用于指示所述交通信号灯装置的红绿灯切换时间。
232.可选地,所述确定模块32,具体用于:
233.根据所述多个交通信号灯装置的第一个交通信号灯装置的各监测子区域内的移动对象的数量,确定所述第一个交通信号灯装置的红绿灯切换时间;
234.根据所述第一个交通信号灯装置的红绿灯切换时间,以及,其他交通信号灯装置的各监测子区域内的移动对象的数量,确定所述其他交通信号灯装置的红绿灯切换时间,以使所述多个交通信号灯装置形成交通绿波带。
235.可选地,所述确定模块32,具体用于:
236.根据所述第一个交通信号灯装置的红绿灯切换时间、所述第一个交通信号灯装置与所述其他交通信号灯装置之间的距离,以及,移动对象的移动速度,确定所述其他交通信号灯装置的红绿灯切换时间中从红灯切换至绿灯的第一时间;
237.根据所述其他交通信号灯装置的各监测子区域内的移动对象的数量,确定所述其他交通信号灯装置的绿灯持续时长;
238.将所述第一时间和所述绿灯持续时长相加,得到所述其他交通信号灯装置的红绿灯切换时间中从绿灯切换至红灯的第二时间。
239.可选地,所述确定模块32,具体用于:若所述其他交通信号灯装置的各监测子区域内的移动对象的数量小于或等于预设数量,则将所述预设持续时长作为所述其他交通信号灯装置的绿灯持续时长;
240.或者,若所述其他交通信号灯装置的各监测子区域内的移动对象的数量大于预设数量,则根据其他交通信号灯装置的各监测子区域内的移动对象的数量,获取延长时长;其中,所述延长时长与所述各监测子区域内的移动对象的数量正相关;若所述延长时长小于预设最大时长,则将所述延长时长与预设持续时长相加,得到所述其他交通信号灯装置的绿灯持续时长;或者,若所述延长时长大于或等于所述预设最大时长,则将所述预设最大时长与所述预设持续时长相加,得到所述其他交通信号灯装置的绿灯持续时长。
241.本技术提供的交通信号灯控制装置,用于执行前述交通信号灯控制方法实施例中交通控制平台的动作,其实现原理与技术效果类似,对此不再赘述。
242.图9是本技术实施例提供的一种电子设备的结构示意图。如图9所示,该电子设备400可以包括:至少一个处理器401和存储器402。
243.存储器402,用于存放程序。具体地,程序可以包括程序代码,程序代码包括计算机操作指令。
244.存储器402可能包含高速随机存取存储器(random access memory,ram),也可能
还包括非易失性存储器(non
‑
volatile memory),例如至少一个磁盘存储器。
245.处理器401用于执行存储器402存储的计算机执行指令,以实现前述方法实施例所描述的交通信号灯控制方法。该电子设备例如可以是前述所说的交通信号灯装置,或者交通控制平台。当电子设备为交通信号灯装置的时候,其还可以包括前述所描述的其他部件,例如图1所示的结构,对此不再赘述。
246.其中,处理器401可能是一个中央处理器(central processing unit,cpu),或者是特定集成电路(application specific integrated circuit,asic),或者是被配置成实施本技术实施例的一个或多个集成电路。
247.可选地,该电子设备400还可以包括通信接口403。在具体实现上,如果通信接口403、存储器402和处理器401独立实现,则通信接口403、存储器402和处理器401可以通过总线相互连接并完成相互间的通信。总线可以是工业标准体系结构(industry standard architecture,isa)总线、外部设备互连(peripheral component,pci)总线或扩展工业标准体系结构(extended industry standard architecture,eisa)总线等。总线可以分为地址总线、数据总线、控制总线等,但并不表示仅有一根总线或一种类型的总线。
248.可选地,在具体实现上,如果通信接口403、存储器402和处理器401集成在一块芯片上实现,则通信接口403、存储器402和处理器401可以通过内部接口完成通信。
249.本技术还提供了一种计算机可读存储介质,该计算机可读存储介质可以包括:u盘、移动硬盘、只读存储器(read
‑
only memory,rom)、ram存储器、磁盘或者光盘等各种可以存储程序代码的介质,具体的,该计算机可读存储介质中存储有程序指令,程序指令用于上述实施例中的方法。
250.本技术还提供一种程序产品,该程序产品包括执行指令,该执行指令存储在可读存储介质中。电子设备的至少一个处理器可以从可读存储介质读取该执行指令,至少一个处理器执行该执行指令使得电子设备实施上述的各种实施方式提供的交通信号灯控制方法。
251.最后应说明的是:以上各实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述各实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。