1.本发明涉及修整装置。
背景技术:
2.在一边使工件旋转一边通过磨石进行研磨的磨床中,为了使磨石的形状毁坏复原而进行磨石的修整。修整一般在达到预先设定的工件的研磨数量时进行。磨石的形状毁坏取决于工件的研磨数量,但为了不制造不合格的工件,而设定为具有富余的研磨数量。因此,成为使磨石的寿命降低的重要因素,为此实现工件的品质的稳定化的同时,希望磨石的长寿命化。
3.在日本特开平10
‑
000556号公报中,记载了取得磨床的振动中的磨石的旋转频率的整数倍的特定频率,根据该振动的振幅进行修整时期、修整优劣的判定。另外,在日本特开2000
‑
263437号公报中,记载了若对磨石进行旋转驱动的马达的电流值超过阈值,则判定为磨石的锋利度变差,进行磨石的修饰。
技术实现要素:
4.本发明提供能够通过与以往不同的手法实现工件的稳定化的同时实现磨石的长寿命化的修整装置。
5.修整装置具备:检测器,其作为表示具有中心轴的工件的表面状态的评价值,检测表示上述工件在轴向上的表面性状的表面性状评价值、以及多个轴向位置处的有关外径的外径评价值中的至少一个评价值;计算部,其基于与由上述检测器检测出的上述工件的上述表面状态相对应的上述至少一个评价值,计算在构成为研磨上述工件的磨石上从基准表面状态起算的形状毁坏程度;判定部,其基于上述形状毁坏程度,判定可否执行上述磨石的修整以及可否变更上述修整的条件的至少一方;以及执行部,其基于上述判定部的判定结果执行上述磨石的上述修整。
6.作为表示工件的表面状态的评价值,使用表面性状评价值、外径评价值的至少一个评价值。该评价值表示工件本身的表面状态。而且,磨石的表面状态被转印于工件的表面,因此该评价值表示磨石的表面状态。
7.因此,计算部使用间接表示磨石的表面状态的该评价值,计算磨石的形状毁坏程度。之后,基于计算出的形状毁坏程度,判定部判定可否执行修整、可否变更修整的条件的至少一个。因此,通过基于使用工件的表面状态间接进行了评价的磨石的形状毁坏程度执行修整,能够实现工件的品质的稳定化、磨石的长寿命化。
附图说明
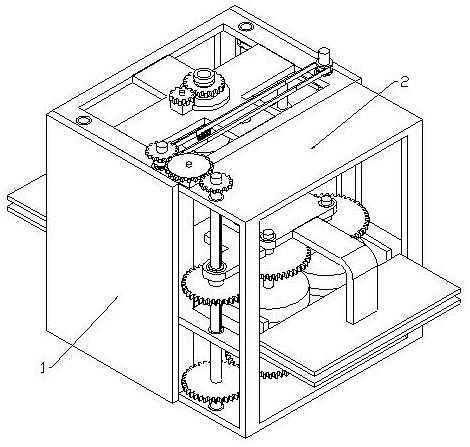
8.图1是表示磨床的一个例子的俯视图。
9.图2是修整装置的功能框图。
10.图3是表示在判定部以及执行部的第一例处理中,磨石状态等级相对于工件w的研
磨数量的推移的图。
11.图4是表示判定部的第一例处理的流程图。
12.图5是表示在判定部以及执行部的第二例处理中,磨石状态等级相对于工件w的研磨数量的推移的图。
13.图6是表示判定部的第二例处理的流程图。
14.图7是表示在判定部以及执行部的第三例处理中,磨石状态等级相对于工件w的研磨数量的推移的图。
15.图8是表示判定部的第三例处理的流程图。
16.图9是表示工件的图。
17.图10是表示第一表面性状评价值的计算所使用的多个周向颤动数据的图。
18.图11是表示面状粗糙度数据的图。
19.图12是表示第一表面性状评价值的计算所使用的多个轴向位置处的颤动量的图。
20.图13是表示外径评价值的计算所使用的外径数据的图。
21.图14是表示第三表面性状评价值的计算所使用的修正面状粗糙度数据的图。
22.图15是表示第三表面性状评价值的计算所使用的多个线状表面性状的图。
具体实施方式
23.(1.修整装置的概要)
24.修整装置是关于搭载于磨床的磨石的修整的装置。修整装置可以为组装于磨床的装置,也可以为与磨床不同的装置。在本例中,举出了修整装置组装于磨床的例子。
25.(2.磨床10的例子)
26.参照图1对应用修整装置的磨床10的一个例子进行说明。磨床10是用于研磨工件w的机床,具有使工件w与磨石16进行相对移动的结构。工件w具有中心轴,一边使工件w绕中心轴旋转,一边使磨石16与工件w接触由此研磨工件w。
27.磨床10能够应用圆筒磨床、凸轮磨床等各种结构的磨床。在本例中,对于磨床10举出磨石座横动式圆筒磨床为例。但是,磨床10还能够应用工作台横动式。另外,虽对于磨床10举出研磨工件w的外周面的结构为例,但还能够应用研磨工件w的内周面的结构。
28.磨床10主要具备机座11、主轴座12、尾座13、横动底座14、磨石座15、磨石16、尺寸确定装置17、磨石修正装置18以及冷却液装置19。并且,磨床10具备检测器21和控制装置22。图中,z轴方向是与工件w的中心轴向一致的方向,x轴方向是与z轴正交的方向,y轴方向是与x轴方向以及z轴方向正交的方向。
29.机座11固定于设置面上。主轴座12在机座11的上表面上设置于x轴方向的近前侧(图1的下侧)且z轴方向的一端侧(图1的左侧)。主轴座12将工件w支承为能够绕z轴旋转。工件w通过设置于主轴座12的马达12a的驱动而绕工件w的中心轴旋转。尾座13在机座11的上表面上设置于在z轴方向上与主轴座12对置的位置,即,x轴方向的近前侧(图1的下侧)且z轴方向的另一端侧(图1的右侧)。即,主轴座12以及尾座13将工件w的两端支承为能够使工件w旋转。应予说明,在磨床10为研磨工件w的内周面的结构的情况下,工件w仅被主轴座12支承。
30.横动底座14以能够沿z轴方向移动的方式设置于机座11的上表面。横动底座14通
过设置于机座11的马达14a的驱动而移动。磨石座15以能够沿x轴方向移动的方式设置于横动底座14的上表面。磨石座15通过设置于横动底座14的马达15a的驱动而移动。
31.磨石16是研磨工件w的工具。在本例中,磨石16应用形成为圆盘状的砂轮。磨石16被磨石座15支承为能够旋转。磨石16通过设置于磨石座15的马达16a的驱动而旋转。磨石16具备圆柱状芯、和构成为通过粘结材料将多个磨粒固定于圆柱状芯的外周面的磨粒部。粘结材料能够应用树脂、金属等各种材料。
32.尺寸确定装置17测定工件w的尺寸(直径)。尺寸确定装置17以能够沿z轴方向移动的方式设置于机座11的上表面。通过设置于机座11的进给机构17a控制尺寸确定装置17的z轴方向的位置。尺寸确定装置17具备与工件w的研磨面接触的检测测定触头17b。检测测定触头17b总是与在研磨过程中旋转的工件w的研磨面接触。
33.磨石修正装置18修正磨石16的形状。磨石修正装置18是进行磨石16的修整(包含修饰(dressing))的装置。并且,磨石修正装置18还具有测定磨石16的尺寸(直径)的功能。
34.这里,修整为形状重塑作业,为在磨石16由于研磨而磨损的情况下与工件w的形状相配合地成型磨石16的作业、除去由于单侧磨损而产生的磨石16的摆动的作业等。修饰为修形(目直
し
,目立
て
)作业,为调整磨粒的突出量或创造磨粒的切削刃的作业。修饰为修正磨粒钝化、堵塞、磨粒脱落等的作业,通常在修整后进行。但是,修整和修饰也有时不特别区别地实施,因此在本说明书中称为修整,以包含修饰的意思使用。
35.冷却液装置19向磨石16对工件w的研磨点供给冷却液。冷却液装置19将回收的冷却液冷却至规定温度,并再次供给至研磨点。
36.检测器21检测表示工件w被研磨的表面状态的评价值。表示工件w的表面状态的评价值为表示工件w在轴向上的表面性状的表面性状评价值、多个轴向位置处的有关外径的外径评价值的至少一个评价值。检测器21被利用于可否执行磨石16的修整、可否变更修整的条件等。
37.检测器21还能够应用与工件w接触的类型、与工件w不接触的类型的任一种。例如,检测器21在为与工件w接触的类型的情况下,能够为检测通过在与工件w的表面接触的状态下相对于工件w相对移动而产生的加速度的加速度传感器。另外,检测器21还能够为能够以规定位置为基准,检测直至工件w的表面的距离的位移传感器。在检测器21为位移传感器的情况下,能够应用与工件w接触的类型、不接触的类型的任一种。
38.在本例中,检测器21作为与工件w接触的类型而使用尺寸确定装置17。检测器21为设置于支承尺寸确定装置17的检测测定触头17b的臂的加速度传感器。作为加速度传感器的检测器21输出表示在检测测定触头17b的中心与旋转的工件w的研磨面接触的状态下检测的加速度的加速度数据。应予说明,检测器21还能够代替加速度传感器,为输出表示在检测测定触头17b的中心与旋转的工件w的研磨面接触的状态下检测的位移值的位移数据的位移传感器。
39.控制装置22根据基于工件w的形状、加工条件、磨石16的形状、冷却液的供给时机信息等的动作指令数据生成的nc程序,控制各驱动装置。即,控制装置22被输入动作指令数据,基于动作指令数据生成nc程序。
40.控制装置22基于nc程序控制各马达12a、14a、15a、16a以及冷却液装置19等,由此进行工件w的研磨。特别是,控制装置22基于由尺寸确定装置17测定的工件w的直径,直至工
件w成为完工形状为止进行研磨。另外,控制装置22在修正磨石16的时机控制各马达14a、15a、16a以及磨石修正装置18等,由此进行磨石16的修正(修整以及修饰)。
41.(3.修整装置30的结构)
42.参照图2对修整装置30的结构进行说明。如图2所示,修整装置30具备检测器31、计算部32、判定部33、执行部34。应予说明,计算部32、判定部33以及执行部34由处理器、存储装置等构成,通过在处理器中执行程序而实现。
43.检测器31使用构成磨床10的检测器21。即,检测器31检测表示工件w被研磨的表面状态的评价值。表示工件w的表面状态的评价值为表示工件w在轴向上的表面性状的表面性状评价值、多个轴向位置处的有关外径的外径评价值的至少一个评价值。
44.计算部32基于作为由检测器31检测的工件w的表面状态的评价值,计算研磨工件w的磨石16上从基准表面状态起算的形状毁坏程度。例如,在磨石16的基准表面状态为与磨石16的中心轴平行的直线的情况下,形状毁坏程度为从与磨石16的中心轴平行的直线沿径向偏离的程度。
45.判定部33基于由计算部32计算出的形状毁坏程度,对可否执行磨石16的修整以及可否变更修整的条件的至少一方进行判定。执行部34基于判定部33的判定结果执行磨石16的修整。执行部34使用构成磨床10的控制装置22。即,执行部34作为控制装置22的一部分发挥功能,通过控制各马达14a、15a、16a以及磨石修正装置18来执行磨石16的修整。
46.(4.判定部33以及执行部34的例子)
47.对构成修整装置30的判定部33以及执行部34的例子进行说明。应予说明,在以下的说明中,将由计算部32计算的磨石16上的从基准表面状态起算的形状毁坏程度称为磨石状态等级。磨石状态等级越高,形状毁坏程度越大,即从基准形状起算的偏离量越大。因此,刚刚进行正常修整之后的磨石状态等级最低,越是研磨工件w则逐渐变得越高。
48.(4
‑
1.第一例)
49.参照图3以及图4对第一例的判定部33以及执行部34进行说明。如图3所示,随着工件w的研磨数量增加,磨石状态等级l变高。第一个工件w的磨石状态等级为l1(1)。第n个磨石状态等级为l1(n)。
50.另外,在图3中,磨石状态等级的最大值为lmax,要求磨石状态等级l不超过该最大值lmax。另外,在正常进行了修整的情况下,刚刚进行修整之后的磨石状态等级不足最小阈值lmin。
51.在本例中,设定了修整的预定时期。例如,作为修整的预定时期,设定从上一次修整起算的工件w的数量n。即,在从上一次修整起算的工件w的数量成为n个的情况下,判定为达到修整的预定时期。
52.在工件w的数量达到n时,基于磨石状态等级l1(n)决定可否相对于修整的预定时期进行延期。在图3中,磨石状态等级l1(n)未超过用于判定的等级阈值lth,因此相对于修整的预定时期进行延期。
53.之后,在工件w的数量成为na时,延期后的磨石状态等级l1(e)超过等级阈值lth,因此执行修整(图3的t1)。而且,在修整后,与上述同样,在从修整起算的工件w的数量达到n时,判定可否进行修整的延期。即,在工件w的总个数达到“na n”时,判定可否进行修整的延期。
54.在图3中,磨石状态等级l2(n)未超过用于判定的等级阈值lth,因此相对于修整的预定时期进行延期。之后,在工件w的数量成为“na nb”时,延期后的磨石状态等级l2(e)超过了等级阈值lth,因此执行修整(图3的t2)。
55.即,与达到修整的预定时期时的磨石状态等级l1(n)、l2(n)相对应地,延期的工件w的数量不同。也可以与预定时期的磨石状态等级l1(n)、l2(n)相对应地决定延期的工件w的数量。
56.参照图4对判定部33的第一例判定处理进行说明。首先,判定部33取得修整后的工件w的数量np(s1)。接着,对所取得的工件w的数量np是否达到了与被设定的修整的预定时期相对应的数量n(设定数量n)进行判定(s2)。在未达到的情况下(s2:否),返回s1。
57.另一方面,在达到了设定数量n的情况下(s2:是),取得修整后的第n个工件w的磨石状态等级l(n)(s3)。接着,基于所取得的磨石状态等级l(n),决定可否相对于被设定的修整的预定时期进行延期(s4)。在决定延期的情况下,决定延长数量δn。与设定数量n的磨石状态等级l(n)相对应地决定延长数量δn。例如,也可以基于设定数量n的磨石状态等级l(n)与最大值lmax之差决定延长数量δn。另外,也可以基于设定数量n的磨石状态等级l(n)与用于判定的等级阈值lth之差决定延长数量δn。
58.接着,对修整后的工件w的数量np是否达到了“n δn”进行判定(s5)。在未达到的情况下(s5:否),直至达到为止持续工件w的研磨。另一方面,在达到的情况下(s5:是),取得工件w的数量np的磨石状态等级l(np)(s6)。
59.接着,对所取得的磨石状态等级l(np)是否超过了用于判定的等级阈值lth进行判定(s7)。若未超过(s7:否),则返回s6。即,直至超过等级阈值lth为止持续工件w的研磨。而且,在超过了等级阈值lth的情况下,决定执行修整(s8)。
60.这里,若判定部33决定执行修整,则执行部34执行磨石16的修整。即,执行部34在到达了被延期的修整的时期时,执行磨石16的修整。
61.应予说明,在上述说明中,在延长修整的时期的情况下决定延长数量δn,在达到了延长数量δn之后比较磨石状态等级l(np)与等级阈值lth,由此决定修整的执行时期。此外,也可以在决定了延长修整的时期的情况下,每次进行工件w的研磨,都比较所取得的磨石状态等级l(np)与等级阈值lth,由此决定修整的执行时期。另外,也可以在决定了延长修整的时期的情况下,在达到了所决定的延长数量δn时,执行修整。
62.综上,基于计算出的磨石状态等级l(形状毁坏程度),判定部33判定可否执行修整。因此,基于使用工件w的表面状态间接地进行了评价的磨石16的形状毁坏程度执行修整,由此能够实现工件w的品质的稳定化、磨石16的长寿命化。
63.(4
‑
2.第二例)
64.参照图5以及图6对第二例的判定部33以及执行部34进行说明。在图5中,磨石状态等级的最大值为lmax,要求磨石状态等级l不超过该最大值lmax。并且,作为磨石状态等级范围,例如设定了lev1、lev2、lev3、lev4。按照lev1、lev2、lev3、lev4的顺序,磨石状态等级提高。另外,lev4的最大值与lmax一致。
65.在本例中,设定了修整的预定时期。例如,作为修整的预定时期,设定从上一次修整起算的工件w的数量n。即,在从上一次修整起算的工件w的数量成为n个的情况下,判定为达到了修整的预定时期。
66.若工件w的数量达到n,则判定部33决定执行磨石16的修整。此时,与即将执行修整之前的磨石状态等级l(n)相对应地决定修整的条件。在本例中,判定磨石状态等级范围lev1、lev2、lev3、lev4中的紧前的磨石状态等级l(n)所属的磨石状态等级范围,变更为与磨石状态等级范围相对应的修整的条件。例如,作为修整的条件变更磨石16的径向切削量。而且,执行部34基于变更后的修整的条件执行修整。
67.在图5中,第n个磨石状态等级l1(n)属于磨石状态等级范围lev2,因此以与lev2相对应的径向切削量执行修整(图5的t1)。第2n个磨石状态等级l2(n)属于磨石状态等级范围lev4,因此以与lev4相对应的径向切削量执行修整(图5的t2)。这样一来,刚刚进行修整t1、t2之后的磨石状态等级均不足最小阈值lmin。
68.参照图6对判定部33的第二例判定处理进行说明。首先,判定部33取得修整后的工件w的数量np(s11)。接着,对所取得的工件w的数量np是否达到了与被设定的修整的预定时期相对应的数量n(设定数量n)进行判定(s12)。在未达到的情况下(s12:否),返回s11。
69.另一方面,在达到了设定数量n的情况下(s12:是),取得修整后的第n个工件w的磨石状态等级l(n)(s13)。这里,在本例中,在研磨了第n个工件w之后,执行磨石16的修整。因此,第n个工件w的磨石状态等级l(n)成为即将执行修整之前的磨石状态等级。
70.接着,对所取得的磨石状态等级l(n)在磨石状态等级范围lev1、lev2、lev3、lev4之中所属的等级范围进行判定(s14)。接着,决定与所属的磨石状态等级范围相对应的修整的条件(s15)。例如,修整的条件的初始设定值为lev1的情况。因此,在属于lev2、lev3、lev4的情况下,判定为变更修整的条件。在本例中,作为修整的条件,变更磨石16的径向切削量。
71.然后,基于变更后的修整的条件决定执行修整(s16)。这里,若判定部33决定执行修整,则执行部34执行磨石16的修整。即,执行部34以与即将进行修整之前的磨石状态等级l(n)相对应的条件执行磨石16的修整。由此,能够使直至下一次修整为止的工件w的数量的修整间隔形成为所希望的数量。
72.(4
‑
3.第三例)
73.参照图7以及图8对第三例的判定部33以及执行部34进行说明。在图7中,磨石状态等级的最大值为lmax,要求磨石状态等级l不超过该最大值lmax。另外,在正常进行了修整的情况下,刚刚进行修整之后的磨石状态等级不足最小阈值lmin。
74.在本例中,设定了修整的预定时期。例如,作为修整的预定时期,设定从上一次修整起算的工件w的数量n。即,在从上一次修整起算的工件w的数量成为n个的情况下,判定为达到了修整的预定时期。
75.若修整后的工件w的数量达到n,则判定部33决定执行磨石16的修整。而且,刚刚在图7的t1进行了修整之后的磨石状态等级l2(1)并未不足最小阈值lmin。即,意味着未正常进行修整。
76.为此,刚刚进行了t1的修整之后的磨石状态等级l2(1)并未不足最小阈值lmin,因此执行再修整(图7的t2)。这样一来,刚刚进行再修整之后的磨石状态等级l3(1)变得不足最小阈值lmin。再者,若修整后的工件w的数量达到n,则执行修整(图7的t3)。刚刚进行该修整之后的磨石状态等级l4(1)不足最小阈值lmin,因此不执行再修整。
77.参照图8对判定部33的第三例判定处理进行说明。首先,判定部33取得修整后的工件w的数量np(s21)。接着,对所取得的工件w的数量np是否达到了与被设定的修整的预定时
期相对应的数量n(设定数量n)进行判定(s22)。在未达到的情况下(s22:否),返回s21。
78.另一方面,在达到了设定数量n的情况下(s22:是),判定部33决定执行修整(s23)。这样一来,执行部34执行磨石16的修整。
79.接着,判定部33取得研磨后的磨石状态等级l(1)(s24)。即,在修整后研磨工件w,取得与研磨后的该工件w有关的磨石状态等级l(1)。然后,对所取得的磨石状态等级l(1)是否不足最小阈值lmin进行判定(s25)。即,判定部33判定可否执行再修整。在不足最小阈值lmin的情况下(s25:是),结束判定部33的判定处理。
80.另一方面,在并未不足最小阈值lmin的情况下(s25:否),判定部33决定执行再修整(s26)。这样一来,执行部34执行再修整。
81.这里,再修整的条件可以被设定为与通常的修整的条件不同的条件。例如,将作为再修整的条件的径向切削量设定为少于通常的修整的径向切削量。另外,也可以与研磨后的磨石状态等级l(1)相对应地决定再修整的条件。例如,也可以与研磨后的磨石状态等级l(1)与最小阈值lmin之差相对应地,决定再修整的条件。
82.在再修整后,返回s24继续处理。因此,若不是再次由于修整不合格而研磨后的磨石状态等级l(1)不足最小阈值lmin,则反复执行修整。
83.(4
‑
4.其他)
84.判定部33还能够进行将第一例判定处理与第三例判定处理合并后的处理。另外,判定部33还能够进行将第二例判定处理与第三例判定处理合并后的处理。即,能够在第一例判定处理或者第二例判定处理中决定修整的执行时期,在第三例判定处理中决定可否执行刚刚进行修整之后的再修整。
85.(5.评价值)
86.接下来,对检测器31检测的评价值进行说明。如上述那样,评价值为表面性状评价值、外径评价值的至少一个。
87.(5
‑
1.第一表面性状评价值)
88.第一表面性状评价值是评价由于颤振而形成的工件w的表面状态的值。具体而言,第一表面性状评价值为使用表示周向的颤振状态的周向颤动而得到的值。更详细而言,第一表面性状评价值使用从多个轴向位置处的周向颤动分别得到的多个颤动量。以下,对第一表面性状评价值的计算方法进行说明。
89.按照时间序列取得由检测器31检测出的加速度数据或者位移数据。例如,在使尺寸确定装置17的检测测定触头17b与工件w的研磨面上的接触位置螺旋状地移动时,取得与旋转的工件w的每隔规定角度的螺旋状的位置有关的时间序列数据。即,取得多个时间序列数据。
90.即,尺寸确定装置17的检测测定触头17b在伴随着研磨而使工件w旋转的状态下,通过进给机构17a而沿作为工件w的轴向的z轴方向移动。在该情况下,尺寸确定装置17的检测测定触头17b与工件w的研磨面接触,因此检测测定触头17b的中心与工件w的接触位置在工件w的研磨面上描绘螺旋状的轨迹进行移动。因此,所取得的多个加速度数据为检测测定触头17b在研磨面上以螺旋状相对移动的同时被检测的加速度数据,且是螺旋状的每隔规定角度区别的数据。
91.例如,在图9所示的工件w中,为取得工件w的一周程度的加速度数据的情况。在该
情况下,数据取得位置从周向位置pa以螺旋状移动,通过周向位置pb,再次返回周向位置pa。通过使工件w的一周程度的加速度数据以规定角度间隔分离成多个,由此生成上述多个加速度数据。应予说明,通过以螺旋状移动,能够在短时间内取得不同轴向位置处的时间序列数据。
92.接着,对从检测器31(加速度传感器)按照时间序列取得的多个加速度数据进行fft(高速傅立叶转换),提取与具有与磨石16的转数相对应的旋转频率成分(特定频率成分)的加速度有关的数据。然后,对与具有所提取的特定频率成分的加速度有关的数据进行反向fft。由此,转换为具有特定频率成分的尺寸确定装置17的检测测定触头17b的位移值,即,与工件w的研磨面上的起因于磨石的凹凸(表面粗糙度)有关的位移数据(周向颤动数据)。应予说明,特定频率成分为磨石16的转数以及转数的整数倍的频率成分。
93.这样一来,生成多个起因于磨石的周向颤动数据。如图10所示,多个起因于磨石的周向颤动数据例如为a1
‑
a6。所取得的加速度数据为螺旋状的轨迹上的数据,因此如图10所示,各个周向颤动数据a1
‑
a6的周向位置成为不同位置。
94.这里,一边使磨石16旋转一边研磨工件w。因此,磨石16的表面形状每隔磨石16的旋转周期,即,每隔转数被转印而出现在工件w的研磨面上。具体地,在磨石16的表面存在较大地突出的磨粒的情况下,在工件w的研磨面上形成有将与磨粒抵接的位置较大地削去而成的凹部。在该情况下,形成于工件w的凹部在旋转方向上以等间隔形成,工件w的周向上的凹部的间隔与磨石16的旋转周期(每隔转数)一致。因此,通过提取与具有特定频率成分的加速度有关的数据,能够提取工件w的研磨面上的起因于磨石的凹凸。
95.接着,使用工件w的研磨面上的周向颤动数据(位移数据),生成一系列的面状粗糙度数据。如上述那样,所生成的多个周向颤动数据是每隔相对于工件w的旋转轴的角度相互不同的角度生成的。因此,如图10所示,邻接的轴向位置处的周向颤动数据成为相互在工件w的周向上偏离的位置的数据。
96.如上述那样,工件w的研磨面上的周向的凹凸(表面粗糙度)每隔磨石16的旋转周期而在工件w的研磨面上反复出现。因此,使每隔不同角度的各个周向颤动数据在周向(图11所示的箭头方向)上移动。由此,如图11所示,使每隔不同角度的各个周向颤动数据形成为与工件w的角度相同的角度,并且,生成在轴向上并列排列的一系列的面状粗糙度数据。
97.这里,在分割从以螺旋状取得的加速度数据转换得到的周向颤动数据(位移数据)的情况下,有时由分割出的各个粗糙度数据表示的凹凸偏离。为此,在生成面状粗糙度数据时,以各个周向颤动数据的端点处的凹凸沿工件w的轴向(z轴方向)具有连续性的方式,修正各个周向颤动数据的相对位置即可。在该情况下,将修正了位置后的各个周向颤动数据沿轴向排列而生成作为状态数据的面状粗糙度数据。
98.接着,如图12所示,使用所生成的面状粗糙度数据,计算多个轴向位置处的颤动量。这里的颤动量是指各个周向颤动数据中的最大值与最小值之差。例如,计算图11中的周向颤动数据a1
‑
a6各自的颤动量。实际上,周向颤动数据在工件w的周向上每隔微小角度进行分割,因此计算比图示的数量更多个的轴向位置处的颤动量。
99.而且,第一表面性状评价值能够形成为多个轴向位置处的颤动量的平均值、该颤动量的差异程度(方差、平均偏差等)、该颤动量中的最大值与最小值之差的至少一个。应予说明,第一表面性状评价值也可以为颤动量的平均值、差异程度、差的任一个,还可以为将
它们复合而得到的复合值。应予说明,在上述说明中,为了与下述内容相关联,而使用多个周向颤动数据生成面状粗糙度数据,但不需要生成面状粗糙度数据。
100.(5
‑
2.外径评价值)
101.外径评价值是评价轴向位置处的工件w的外径的变化的值。以下,对外径评价值的计算方法进行说明。
102.基于来自尺寸确定装置17的信号,取得工件w的外径数据。首先,基于来自尺寸确定装置17的信号,取得以纵轴为外径的位移的时间序列数据亦即外径数据。
103.接着,对所取得的外径数据进行fft,提取特定的频率区域成分。具体而言,除去相当于工件w的旋转频率的成分亦即1山/周成分。在工件w的旋转轴偏离的情况等下检测到较强的1山/周成分。作为外径数据,得到工件w的轴向的外径变化便足够,因此这里除去1山/周成分。
104.并且,在所取得的外径数据的高频率侧,检测到工件w的周向颤动所引起的振动。周向颤动为上述第一表面性状评价值的计算中的周向颤动数据所包含的信息。这里提取的低频率成分的范围能够根据磨石16以及工件w的转数等适当地决定即可,但例如能够形成为50hz以下。这样,通过提取除了1山/周成分之外的低频率成分作为特定频率区域成分,而提取工件w的轴向的外径变化。
105.接着,对具有所提取的特定频率成分的外径数据进行反向fft。由此,转换为与具有特定频率成分的外径的位移有关的时间序列数据。例如,所生成的外径数据如图13所示。
106.而且,外径评价值能够形成为多个轴向位置处的外径的平均偏差、外径的差异程度、外径的最大值与最小值之差的至少一个。应予说明,外径评价值也可以为外径的平均偏差、差异程度、差的任一个,还可以为将它们复合而得到的复合值。
107.(5
‑
3.第二表面性状评价值)
108.第二表面性状评价值是使用将工件w的表面性状表示为面状的面状表面性状,评价工件w的表面状态的值。具体而言,第二表面性状评价值是使用面状表面性状,取得表示各个周向位置、轴向位置与表面性状之间的关系的线状表面性状,使用各个线状表面性状中的代表值而得到的值。
109.更详细而言,使用在第一表面性状评价值的计算过程中生成的面状粗糙度数据、和在外径评价值的计算过程中生成的外径数据,生成作为面状表面性状的修正面状粗糙度数据。而且,第二表面性状评价值使用修正面状粗糙度数据。
110.首先,取得在第一表面性状评价值的计算过程中生成的面状粗糙度数据(图11所示)。并且,取得在外径评价值的计算过程中生成的外径数据(图13所示)。然后,通过合成面状粗糙度数据和外径数据,而生成图14所示那样的修正面状粗糙度数据。修正面状粗糙度数据相当于第二表面性状评价值所使用的面状表面性状。
111.接着,如图14所示,在修正面状粗糙度数据中,对于各个周向位置θa、θb,取得表示图15所示那样的轴向位置与表面性状之间的关系的线状表面性状。针对每个周向位置生成多个线状表面性状。接着,取得各个线状表面性状中的代表值。代表值能够使用算术平均粗糙度ra、最大高度粗糙度rz、十点平均粗糙度等。
112.而且,第二表面性状评价值能够形成为多个代表值的平均值、多个代表值的差异程度、多个代表值中的最大值与最小值之差的至少一个。应予说明,第二表面性状评价值也
可以为多个代表值的平均值、差异程度、差的任一个,还可以为将它们复合而得到的复合值。
113.(5
‑
4.第三表面性状评价值)
114.第三表面性状评价值是使用将工件w的表面性状表示为面状的面状表面性状,评价工件w的表面状态的值。具体而言,第三表面性状评价值是面状表面性状中的作为面整体的代表值。代表值为面上的算术平均粗糙度sa、面上的最大高度sz、面上的均方根根高sq等。
115.若第三表面性状评价值中使用的面状表面性状能够由检测器31直接检测,则第三表面性状评价值中使用的面状表面性状能够形成为该检测数据。另外,该面状表面性状也可以形成为在第一表面性状评价值的计算过程中生成的面状粗糙度数据,还可以形成为在第二表面性状评价值的计算过程中生成的修正面状粗糙度数据。
116.(6.总结)
117.如上述那样,修整装置30作为表示工件w的表面状态的评价值,使用表面性状评价值、外径评价值的至少一个评价值。该评价值表示工件w本身的表面状态。而且,磨石16的表面状态被转印于工件w的表面,因此该评价值表示磨石16的表面状态。
118.因此,计算部32使用间接表示磨石16的表面状态的该评价值,计算磨石16的形状毁坏程度(磨石状态等级)。之后,基于计算出的形状毁坏程度(磨石状态等级),判定部33判定可否执行修整、可否变更修整的条件的至少一个。因此,通过基于使用工件w的表面状态间接进行了评价的磨石16的形状毁坏程度(磨石状态等级)执行修整,能够实现工件w的品质的稳定化、磨石16的长寿命化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。