技术特征:
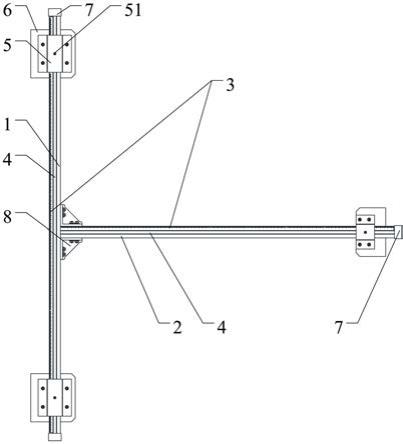
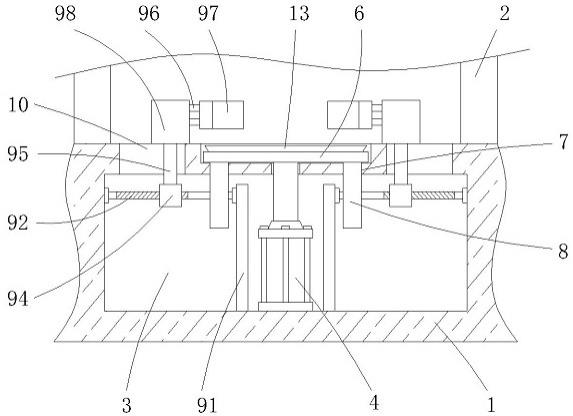
1.一种基于智能化控制的自动焊接机器人,包括底板(1)和支撑柱(2),其特征在于:所述底板(1)的顶部通过螺栓安装有支撑柱(2),所述支撑柱(2)的顶部安装有壳体(201),所述壳体(201)的内侧贯穿安装有丝杆(203),所述丝杆(203)的外侧螺纹安装有活动环(304),所述丝杆(203)后端贯穿壳体(201)的后壁连接有电动机(204),且电动机(204)安装在壳体(201)的后端;所述底板(1)的顶部通过螺栓安装有固定板(8),且引导滑槽(205)位于支撑柱(2)的一侧,所述固定板(8)的顶部安装有固定箱(806),所述固定箱(806)的内壁一侧安装有控制电机(807),所述控制电机(807)的输出端贯穿固定箱(806)一侧外壁,所述控制电机(807)的输出端安装有转杆(808),转杆(808)的一端安装有第二挤压板(809),底板(1)的顶部通过螺栓安装有支撑板(801),支撑板(801)的一侧安装有伸缩杆(803)。2.根据权利要求1所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述壳体(201)的顶部安装有两组对称分布的引导滑槽(205),壳体(201)的顶部开设有活动槽(202),且活动槽(202)位于两组引导滑槽(205)的内侧。3.根据权利要求1所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述活动环(304)的顶部安装有连接板(303),且连接板(303)位于活动槽(202)的内侧,所述连接板(303)的顶部安装有活动板(3),活动板(3)的顶部内侧安装有轴承座(301),轴承座(301)位于连接板(303)的两侧,轴承座(301)的内侧活动连接有滚轮(302),滚轮(302)安装在引导滑槽(205)的内侧。4.根据权利要求3所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述活动板(3)的顶部安装有安装箱(4),安装箱(4)的内部一侧安装有驱动电机(5),所述驱动电机(5)的输出端贯穿安装箱(4)一侧外壁,安装箱(4)的一侧通过螺栓安装有支撑臂(401),所述支撑臂(401)的正面安装有安装板(402),所述安装板(402)的内侧安装有驱动螺杆(501),且驱动螺杆(501)的一端与驱动电机(5)的输出端连接,安装板(402)的内侧安装有引导滑杆(403),且引导滑杆(403)位于驱动螺杆(501)的上方。5.根据权利要求4所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述驱动螺杆(501)的外侧螺纹安装有内螺纹套环(502),内螺纹套环(502)的前端安装有移动板(503),移动板(503)的前端安装有组装板(504),组装板(504)的底部安装有支撑台(505),组装板(504)的背面安装有连接杆(506),连接杆(506)的后端安装有引导环(507),引导环(507)套在引导滑杆(403)的外侧。6.根据权利要求5所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述支撑台(505)的内侧贯穿安装有调节杆(6),调节杆(6)的底端安装有第一固定环(601),第一固定环(601)的一侧安装有第二固定环(602),第二固定环(602)的内侧安装有焊接枪(7)。7.根据权利要求6所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述焊接枪(7)的顶端安装有对接头(702),焊接枪(7)的底端安装有焊接头(701),焊接枪(7)的外侧安装有组装环(703),组装环(703)的一侧通过螺栓安装有调节环(704),调节环(704)的内侧安装有红外线定位器(705)。8.根据权利要求1所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述伸缩杆(803)的一端安装有分离座(804),分离座(804)靠近第二挤压板(809)的一端安装有第一挤压板(805)。
9.根据权利要求1所述的一种基于智能化控制的自动焊接机器人,其特征在于:所述支撑板(801)和固定箱(806)的顶部分别安装有轴承座(802),轴承座(802)的内侧连接有旋转板(901),旋转板(901)的一侧安装有l形板(9),l形板(9)的顶部安装有防滑层(902)。10.根据权利要求1
‑
9任意一项所述的一种基于智能化控制的自动焊接机器人,其特征在于,该装置的工作步骤如下:s1;首先工作人员将需要焊接的工件放置在第二挤压板(809)和第一挤压板(805)之间,然后通过控制器控制伸缩杆(803)伸长,伸缩杆(803)输出端向前移动,带动分离座(804)和第一挤压板(805)向前移动,第一挤压板(805)和第二挤压板(809)之间的距离缩短,通过第一挤压板(805)和第二挤压板(809)对内侧的产品进行挤压固定,保证产品的稳定性,方便在焊接时工件保持稳定,然后电动机(204)运行带动输出端的丝杆(203)进行转动,丝杆(203)转动带动外侧的活动环(304)位移,方便工人根据需要调节活动环(304)的位置,活动环(304)移动带动顶部的连接板(303)向前移动,连接板(303)移动带动顶部活动板(3)向前移动,由滚轮(302)通过轴承座(301)对顶部的活动板(3)支撑,保证活动板(3)保持平稳,在活动板(3)移动的过程中,滚轮(302)沿着引导滑槽(205)移动,方便工作人员将活动板(3)顶部的安装箱(4)移动到指定位置;s2、然后安装箱(4)内部的驱动电机(5)运行,驱动电机(5)带动输出端的驱动螺杆(501)进行转动,驱动螺杆(501)转动带动外侧的内螺纹套环(502)收螺纹影响进行移动,带动组装板(504)移动,组装板(504)通过支撑台(505)对调节杆(6)支撑,组装板(504)移动带动调节杆(6)底部的焊接枪(7)一端到指定位置,实现焊接枪(7)随意移动到指定位置,方便对大体积的工件进行焊接;s3、然后调节杆(6)伸长带动底端的焊接枪(7)向下移动,同时红外线定位器(705)对下方事物进行拍摄,由红外线定位器(705)将检测到的信息传输到控制系统中,控制系统对图像进行分析,对两个工件之间的连接处位置进行确认,保证焊接枪(7)下移焊接头(701)移动到两组工件的连接处,焊接枪(7)运行通电,使得焊接头(701)的温度升高,焊接头(701)将两个工件连接处的物质熔合,使得两个工件焊接起来,在一处焊接完成后,控制电机(807)运行带动输出端的转杆(808)转动,转杆(808)转动带动第二挤压板(809)转动,第二挤压板(809)转动带动工件调节角度,方便装置对工件的其他角度进行加工,保证加工质量。
技术总结
本发明公开了一种基于智能化控制的自动焊接机器人,包括底板和支撑柱,所述底板的顶部通过螺栓安装有支撑柱,所述支撑柱的顶部安装有壳体,所述壳体的内侧贯穿安装有丝杆,所述丝杆的外侧螺纹安装有活动环,所述丝杆后端贯穿壳体的后壁连接有电动机,且电动机安装在壳体的后端;所述底板的顶部通过螺栓安装有固定板,且引导滑槽位于支撑柱的一侧,所述固定板的顶部安装有固定箱。本发明通过安装有控制电机,在一处焊接完成后,控制电机运行带动输出端的转杆转动,转杆转动带动第二挤压板转动,第二挤压板转动带动工件调节角度,第二挤压板转动带动工件和第一挤压板调节角度,方便装置对工件的其他角度进行加工,保证加工质量。量。量。
技术研发人员:邓力铭 邓钦文
受保护的技术使用者:南通慧宁机电科技有限公司
技术研发日:2021.08.03
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。