1.本技术涉及自动化设备领域,尤其涉及一种钨极焊接失效预判检测装置及其检测方法。
背景技术:
2.tig弧焊是广泛应用在金属材料连接方式的重要工艺方法之一,它是采用钨极作为电极,在外加电源的作用下,与工件之间形成电弧,其产生的能量用于熔化母材金属从而实现坚固焊缝进行连接。在tig焊过程中,电弧的稳定性是确保焊接质量一致性的关键。钨极在长时间电弧燃烧时,会造成钨极端部烧损及熔池金属对钨极端部的污染,到达一定程度,就会导致电弧不稳,焊接所需的能力不能通过钨极得到稳定输出,影响焊接质量,造成工件返修或报废,增加制造成本和降低生产效率。现有技术的过程钨极的烧损和污染情况通过人工进行目测分析判断,是否需要更换或修磨钨极,完全取决于人的经验,不能相对可靠准确判断决策。
技术实现要素:
3.本技术所要解决的技术问题在于:提供一种提高焊接过程稳定性,减少产品返修和报废的钨极焊接失效预判检测装置及其检测方法。
4.一方面,一种钨极焊接失效预判检测装置,其包括:工作台、电动底座、影像仪装置、操作机及控制装置,所述电动底座、操作机及控制装置安装在工作台的同一面,所述影像仪装置连接于电动底座的上方,所述电动底座能够驱动影像仪装置旋转运动,所述操作机能够夹持旋转焊枪,所述控制装置能够控制操作机和电动底座,所述影像仪装置用于拍照焊枪的钨极端部,从而实现自动反馈钨极端部是否失效。
5.与现有技术相比,本技术的电动底座能够驱动影像仪装置旋转运动,所述操作机能够夹持旋转焊枪,通过影像仪装置拍照焊枪的钨极端部,自动比对反馈提示,相对准确实现钨极失效预判,及时更换钨极,提高焊接过程稳定性,减少产品返修和报废。
6.进一步地,所述影像仪装置包括影像仪、成像背景部件和固定安装支架,所述影像仪和成像背景部件设置于固定安装支架的相反两侧,且所述影像仪和成像背景部件位于焊枪的相反两侧,所述固定安装支架与电动底座相连,所述电动底座能够驱动固定安装支架作自转。
7.进一步地,所述操作机包括伺服电机、回转齿轮齿圈、气动夹紧机构及位置传感器,所述操作机与影像仪装置成90
°
位置安装。
8.进一步地,所述控制装置包括plc控制系统及成像分析比对模块,所述影像仪装置能够对焊枪的钨极端部长度方向进行拍照,将拍照的每一幅照片上次至控制装置进行比对。
9.进一步地,所述控制装置位于影像仪装置的一侧,所述操作机位于影像仪装置的另一侧。
10.另一方面,一种钨极焊接失效预判检测方法,其包括如下步骤:
11.提供焊枪、操作机、控制装置、影像仪装置及电动底座;
12.操作人员或机械手臂将焊枪送入到检测装置,当焊枪到达检测高度后,操作机夹紧焊枪,操作人员或机械手松开焊枪,退到安全位置;
13.在控制装置发出检测时,影像仪装置与电动底座协同,将多角度照片进行拍照后发送到控制装置;
14.按照设定比对的形状获取偏差数据,并汇总显示的人机界面上,从而预判钨极失效的情况。
15.进一步地,所述影像仪装置是对焊枪的钨极端部长度方向进行拍照,将拍照的每一幅照片上次至控制装置进行比对。
16.进一步地,所述操作机夹紧和旋转焊枪,从而影像仪装置从圆周多个角度对焊枪的钨极端部进行拍照。
17.进一步地,所述控制装置包括控制软件,所述控制软件自动接受来自拍摄的照片,与设定极限失效数据进行自动比对,将比对数据实施显示在界面上,如果有失效数据出现,将及时相似不同颜色并通过指示灯提示预警。
18.进一步地,通过照片与预前设定的形状参数及安全极限数值进行比对,综合预判出失效情况;形状参数包括:
19.台烧损导致底部直径变化;
20.金属蒸汽附着圆锥表面;
21.圆台底面氧化烧损形成凹凸不平状。
附图说明
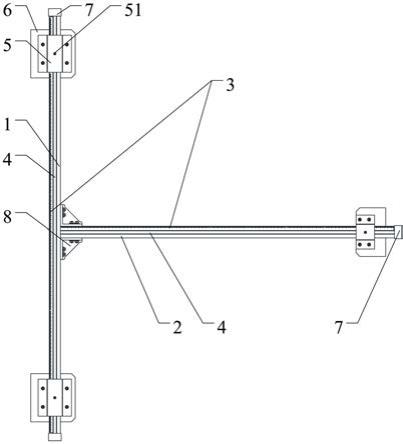
22.图1是本技术一实施例钨极焊接失效预判检测装置的立体图。
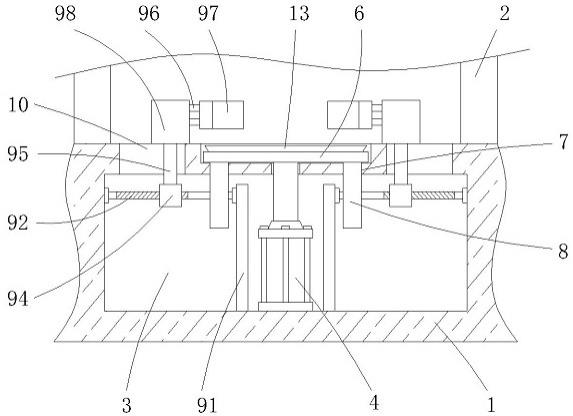
23.图2是申请一实施例钨极焊接失效预判检测装置的爆炸图。
具体实施方式
24.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
25.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。
26.应当理解,本技术说明书以及权利要求书中使用的“第一”“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个;“多个”表示两个及两个以上的数量。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物
件及其等同,并不排除其他元件或者物件。
27.下面结合附图,对本技术示例型实施例进行详细说明。在不冲突的情况下,下述的实施例及实施方式中的特征可以相互补充或相互组合。
28.如图1和图2所示,为符合本技术的一种钨极焊接失效预判检测装置100,其包括:工作台11、电动底座12、影像仪装置13、操作机14及控制装置15。
29.电动底座12、操作机14及控制装置15安装在工作台11的同一面,影像仪装置13连接于电动底座12的上方,电动底座12能够驱动影像仪装置13旋转运动,操作机14能够夹持旋转焊枪16,控制装置15能够控制操作机14和电动底座12。
30.工作台11包括台板111、分别连接于台板111四个角落的四个支脚112、分别连接前后两个支脚112的两个连接杆113、以及连接两个连接杆的横梁114。这样设置的工作台11有利于钨极焊接失效预判检测装置100的安装稳定性。台板111呈平面状,且平行于地面设置。
31.电动底座12安装在工作台11和影像仪装置13之间,电动底座12用于驱动影像仪装置13旋转从而从绕焊枪16的钨极端部161周向不同角度拍摄照片。电动底座12可以通过伺服电机驱动。
32.操作机14包括竖直部141、水平部142及安装盘143,水平部142固定于竖直部141,竖直部141固定于安装盘143,安装盘143固定于工作台11,水平部142垂直于竖直部141设置。
33.影像仪装置13包括影像仪131、成像背景部件132和固定安装支架133,影像仪131和成像背景部件132设置于固定安装支架133的相反两侧,且影像仪131和成像背景部件133位于焊枪16的相反两侧,固定安装支架133与电动底座12相连,电动底座12能够驱动固定安装支架133作自转。影像仪131是高清晰度影像仪。
34.影像仪装置13包括支撑座134和支撑台135,支撑座134支撑于固定安装支架133,支撑台135支撑于支撑座134。焊枪16的钨极端部161在检测时,可以通过操作机14将钨极端部161上下移动,并可以移动至支撑台135从而实现对钨极端部161支撑,从而方便对钨极端部161的检测。
35.操作机14包括伺服电机、回转齿轮齿圈、气动夹紧机构及位置传感器,操作机14与影像仪装置13成90
°
位置安装。操作机14能从圆周多个角度进行拍照,对比数据更加全面。操作机14包括焊枪自动高度检测、夹紧及回转功能。高度检测是为了保证钨极拍照的位置与影像仪的拍照中心一致,减少比对误差。高度检测是通过一组光电传感器来实现。钨极到达检测高度后,回转机构上的气动夹紧装置自动夹紧焊枪,确保高度和中心固定。回转机构是根据需要的拍照角度实现任意旋转,以便获取多角度照片进行比对,回转采用带编码器的高精度电机。
36.控制装置15包括plc控制系统及成像分析比对模块,影像仪装置13能够对焊枪的钨极端部161长度方向进行拍照,将拍照的每一幅照片上次至控制装置进行比对。控制装置15的控制系统不仅实现机械运动所需的功能,其控制软件自动接受来自场景的照片,与设定极限失效数据进行自动比对,将比对数据实施显示在界面上,如果有失效数据出现,将及时相似不同颜色并通过指示灯提示预警。操作者即可直观查看失效的可能原因,并及时更换钨极。软件可记录并分析失效相关数据频次,为操作人员更准确设定极限失效数据作参考。
37.控制装置15位于影像仪装置13的一侧,操作机16位于影像仪装置13的另一侧。
38.一种钨极焊接失效预判检测方法,其包括如下步骤:
39.提供焊枪16、操作机14、控制装置15、影像仪装置13及电动底座12;
40.操作人员或机械手臂将焊枪16送入到检测装置,当焊枪16到达检测高度后,操作机14夹紧焊枪,操作人员或机械手松开焊枪16,退到安全位置;
41.在控制装置15发出检测时,影像仪装置13与电动底座12协同,将多角度照片进行拍照后发送到控制装置15;
42.按照设定比对的形状获取偏差数据,并汇总显示的人机界面上,从而预判钨极失效的情况。
43.影像仪装置13是对焊枪16的钨极端部161长度方向进行拍照,将拍照的每一幅照片上次至控制装置15进行比对。
44.操作机14夹紧和旋转焊枪,从而影像仪装置13从圆周多个角度对焊枪16的钨极端部161进行拍照。
45.控制装置15包括控制软件,控制软件自动接受来自拍摄的照片,与设定极限失效数据进行自动比对,将比对数据实施显示在界面上,如果有失效数据出现,将及时相似不同颜色并通过指示灯提示预警。
46.钨极失效主要在端部5mm以内范围,该部分钨极的形状为圆锥状,底部为圆台,上部为一定角度的圆锥面。有三种情况是导致钨极失效的原因,一类是钨极端部烧损后圆台直径变大或局部烧损,导致电弧偏移。一类是熔化过程中,母材金属蒸汽附着在圆锥面上形成毛刺状,电弧环绕钨极。一类是钨极圆台底部氧化烧损,形成凹凸不平状,影响电弧纵向分布的稳定性。tig焊接电弧有一定冗余能力,这三类情况在一定极限范围内烧损是不会影响焊缝质量。只有超过极限,才可能导致电弧失稳,影响焊接质量,因此结合经验和多次试验,即可找到安全极限值。需要比对的就是从这三类情况出发,通过照片与预前设定的形状参数及安全极限数值进行比对,即可综合预判出失效情况。
47.失效方式1:圆台烧损导致底部直径变化。
48.失效方式2:金属蒸汽附着圆锥表面。
49.失效方式3:圆台底面氧化烧损形成凹凸不平状。
50.本技术不局限于上述具体的实施方式,本领域的普通技术人员从上述构思出发,不经过创造性的劳动,所作出的种种变换,均落在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。