1.本发明属于车辆控制技术领域,更具体地,涉及一种防止电动助力转向机控制器数据异常的控制方法及装置。
背景技术:
2.目前相关的电动助力转向机控制器产品仅针对部分关键信号设置安全值,当控制器内部出现故障导致数据异常时,某一个关键信号异常会导致多个功能模块无法正常使用或者进入性能降级状态,不能有效的保证功能的正确运转,甚至会引发超出安全边界的性能表现。
技术实现要素:
3.针对现有技术的以上缺陷或改进需求,本发明提出了一种防止电动助力转向机控制器数据异常的控制方法及装置,可以保证数据异常时车辆的横向控制不会出现异常,保证驾驶员的生命安全。
4.为实现上述目的,按照本发明的一个方面,提供了一种防止电动助力转向机控制器数据异常的控制方法,包括:
5.将电动助力转向机控制器按照功能分为各子功能模块,并根据各子功能模块的功能分别为各子功能模块设置多项关键阈值;
6.对已经开启相应功能的子功能模块进行数据监控,结合子功能模块对应的多项关键阈值判断是否存在数据发生异常的子功能模块;
7.若存在数据发生异常的子功能模块,则确定发生异常的子功能模块的异常级别,并对发生异常的子功能模块按照异常级别指向的功能或性能降级处理。
8.在一些可选的实施方案中,根据各子功能模块的功能分别为各子功能模块设置多项关键阈值,包括:
9.对于每个子功能模块,将该子功能模块所涉及的关键阈值放入矩阵j中,其中,j=[f1,f2,f3,
…
,f
n
],f1到f
n
为功能的关键阈值的无符号转化量;
[0010]
将该子功能模块所涉及的关键性能值放入矩阵p中,其中,p=[p1,p2,p3,
…
,p
n
],p1到p
n
为功能的关键性能值所对应的无符号转化量;
[0011]
j
′
和p
′
中分别放入相应的关键量所对应的权重,其中,j
′
=[fw1,fw2,fw3,
…
,fw
n
],p
′
=[pw1,pw2,pw3,
…
,pw
n
],fw1到fw
n
为功能的关键阈值和标志位的无符号转化量对应的权重,pw1到pw
n
为功能的关键性能值所对应的无符号转化量对应的权重;
[0012]
由s=p
×
p
′
j
×
j
′
确定数据异常的整体控制的安全门限值。
[0013]
在一些可选的实施方案中,对已经开启相应功能的子功能模块进行数据监控,包括:
[0014]
对已经开启相应功能的子功能模块,每个子功能模块的关键项仅存储上一时刻该子功能模块的功能正常时的值,对于时刻t
n
‑1,对于子功能模块的功能关键项和性能关键项
分别放入j
n
‑1和p
n
‑1中,下一时刻t
n
时,则用此刻所得到的新值j
n
和p
n
替代j
n
‑1和p
n
‑1的值,其中,j
n
‑1=[f1
n
‑1,f2
n
‑1,f3
n
‑1,
…
,fn
n
‑1],p
n
‑1=[p1
n
‑1,p2
n
‑1,
…
,pn
n
‑1],j
n
=[f1
n
,f2
n
,f3
n
,
…
,fn
n
],p
n
=[p1
n
,p2
n
,p3
n
,
…
,pn
n
],f1
n
‑1到fn
n
‑1为t
n
‑1时刻功能关键项的无符号转化量,p1
n
‑1到pn
n
‑1为t
n
‑1时刻性能关键项的无符号转化量,f1
n
到fn
n
为t
n
时刻功能关键项的无符号转化量,p1
n
到pn
n
为t
n
时刻性能关键项的无符号转化量。
[0015]
在一些可选的实施方案中,结合子功能模块对应的多项关键阈值判断是否存在数据发生异常的子功能模块,包括:
[0016]
由s
n
=p
n
×
p
′
j
n
×
j
′
用j
n
和p
n
构成当前的数据异常判定方程;
[0017]
有在相应的子功能模块中对s和s
n
进行比对,其中,δ1,δ2,为对应项的修正系数,s
n
′
表示s
n
在t
n
时刻的导数,s
′
表示s0~s
n
在t
n
时刻的加权平均数。
[0018]
在一些可选的实施方案中,确定发生异常的子功能模块的异常级别,并对发生异常的子功能模块按照异常级别指向的功能或性能降级处理,包括:
[0019]
根据q的计算结果将数据溢出状态分级,当q>2时认为数据异常类型为数据完全丢失;当2>q>1时,认为数据异常;当q<1时认为数据在正常的范围内;
[0020]
根据数据状态的监控对比结果进行数据备份和控制,当q<1时,仅对各功能的关键项(j
n
‑1,p
n
‑1,j
n
,p
n
)进行存储备份,当2>q>1时,使用j
n
‑1,p
n
‑1替换控制器中存储的当前值,让电动助力转向控制器中出现数据异常的子功能,维持上一时刻的工作状态,当q>2时,直接将该功能禁用,防止出现不必要的安全问题。
[0021]
在一些可选的实施方案中,所述方法还包括:
[0022]
导出并读取发生数据异常的子功能的q,j
n
‑1,p
n
‑1,j
n
,p
n
值,根据数据分析重新定义δ1,δ2,的值,实现数据异常控制的自适应调整。
[0023]
在一些可选的实施方案中,在确定发生异常的子功能模块的异常级别,并对发生异常的子功能模块按照异常级别指向的功能或性能降级处理之后,所述方法还包括:
[0024]
当出现数据异常的子功能模块数量超过预设个数时,对电动助力转向机控制器整体功能进行降级处理。
[0025]
按照本发明的另一方面,提供了一种防止电动助力转向机控制器数据异常的控制装置,包括:
[0026]
阈值设定模块,用于将电动助力转向机控制器按照功能分为各子功能模块,并根据各子功能模块的功能分别为各子功能模块设置多项关键阈值;
[0027]
异常判断模块,用于对已经开启相应功能的子功能模块进行数据监控,结合子功能模块对应的多项关键阈值判断是否存在数据发生异常的子功能模块;
[0028]
异常处理模块,用于若存在数据发生异常的子功能模块,则确定发生异常的子功能模块的异常级别,并对发生异常的子功能模块按照异常级别指向的功能或性能降级处理。
[0029]
按照本发明的另一方面,提供了一种包括上述防止电动助力转向机控制器数据异常的控制装置的电动助力转向机控制器。
[0030]
按照本发明的另一方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述方法的步骤。
[0031]
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
[0032]
安全效益:应用本发明中数据异常的控制方法可有效抑制电动助力转向机控制器数据异常时出现功能异常和失效,从而保证数据异常时车辆的横向控制不会出现异常,保证驾驶员的生命安全。并且当数据出现异常时没有有效的对各功能需要的关键参数进行备份和保护。
[0033]
经济效益:应用本发明可在数据异常类故障发生过程中和发生后进行故障恢复,从而降低车辆的返修频次及电动助力转向机控制器的故障率。
[0034]
潜在客户效益:应用本发明中数据异常的控制方法可以有效的降低能被用户感知的产品故障率,从提升用户的满意度。
[0035]
企业效益:应用本发明的产品故障率降低,降低产品的维修、报废率,从而达到经济效益的提升和企业形象的维护。
附图说明
[0036]
图1是本发明实施例提供的一种防止电动助力转向机控制器数据异常的控制方法的流程示意图;
[0037]
图2是本发明实施例提供的一种电动助力转向机控制器整体功能模块拓扑图;
[0038]
图3是本发明实施例提供的一种防止电动助力转向机控制器数据异常的控制方法的流程示意图;
[0039]
图4是本发明实施例提供的一种防止电动助力转向机控制器数据异常的控制装置的结构示意图。
具体实施方式
[0040]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0041]
实施例一
[0042]
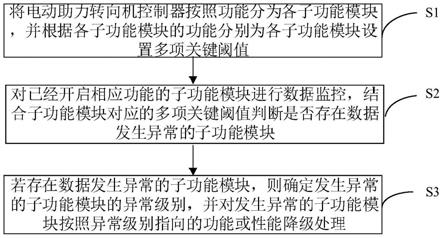
如图1所示是本发明实施例提供的一种防止电动助力转向机控制器数据异常的控制方法的流程示意图,在图1所示的方法中包括以下步骤:
[0043]
s1:将电动助力转向机控制器按照功能分为各子功能模块,并根据各子功能模块的功能分别为各子功能模块设置多项关键阈值;
[0044]
s2:对已经开启相应功能的子功能模块进行数据监控,结合子功能模块对应的多项关键阈值判断是否存在数据发生异常的子功能模块;
[0045]
s3:若存在数据发生异常的子功能模块,则确定发生异常的子功能模块的异常级别,并对发生异常的子功能模块按照异常级别指向的功能或性能降级处理。
[0046]
如图2所示,对于电动助力转向机控制器,可按照功能分为各主要的功能模块:电
动助力转向系统(electric power steering,eps)模式管理、高级驾驶辅助系统(advanced driving assistance system,adas)适配、角度数据调整、转向请求扭矩仲裁、转向扭矩调整、摩擦力补偿、惯性补偿等。针对各个子功能模块都有相应的数据异常的监控及控制,并根据功能的不同设置多项关键阈值,对各子功能模块进行数据异常的分级控制。具体子功能模块发生数据异常时,可进行数据异常级别的计算和判定,当计算结果指向对应级别时进行对应的功能或性能降级处理,并对发生异常的子功能模块进行数据备份。
[0047]
本发明分功能的对电动助力转向所涉及到的各重要功能模块(基础助力、主动回正、阻尼补偿、adas辅助等)进行数据保护,利用设置电动助力转向机控制器中各功能的安全阈值检测电动助力转向机控制器的工作状态,当检测到对应模块发生数据异常时(丢失、错误或超差)若触发相应功能的安全阈值,则电动助力转向机控制器中该功能进行数据保护和功能降级处理,使用备份好的保守数据,但不会影响其他模块的正常工作和运行,此时电动助力转向机对应功能的性能降级,但整体功能在安全使用和正常运行的范围内。同时,提出了当电动助力转向控制器出现数据异常后各功能的保护和恢复方法。
[0048]
实施例二
[0049]
如图3所示是本发明实施例提供的一种防止电动助力转向机控制器数据异常的控制方法的流程示意图,包括以下步骤:
[0050]
s00:电动助力转向机控制器上电唤醒后,即开启相应的数据异常控制管理模块,该模块会依据功能开启标志位,对已经开启的功能进行数据监控、对比、及数据记录;
[0051]
其中,该标志位为每个功能模块自带的一个特定内部信号(也可以上传至can),一般功能开启时为1,功能关闭时为0。
[0052]
s10:当相应的数据异常监控管理模块开启时,会按照该子功能模块的关键项安全门限设置;
[0053]
在本实施例中,步骤s10可以通过以下方式实现:
[0054]
将该子功能模块所涉及的关键阈值放入矩阵j中:
[0055]
j=[f1,f2,f3,
…
f
n
]
ꢀꢀꢀ
(1)
[0056]
其中,f1到f
n
即为功能的关键阈值的无符号转化量,关键阈值和具体的功能有关,不同功能的关键阈值是不同的。
[0057]
将该功能所涉及的关键性能值放入矩阵p中:
[0058]
p=[p1,p2,p3,
…
p
n
]
ꢀꢀꢀ
(2)
[0059]
其中,p1到p
n
即为功能的关键性能值所对应的无符号转化量。
[0060]
以一个具体示例说明功能的关键阈值和功能的关键性能值的含义:eps支持车道保持辅助(lane keeping assist,lka)这个功能,驾驶员施加到方向盘上的扭矩是一个关键阈值;而方向盘所转的角度是一个关键性能值。
[0061]
而j’和p’中分别放入相应的关键量所对应的权重:
[0062]
j
′
=[fw1,fw2,fw3,
…
fw
n
]
ꢀꢀꢀ
(3)
[0063]
p
′
=[pw1,pw2,pw3,
…
pw
n
]
ꢀꢀꢀ
(4)
[0064]
其中,fw1到fw
n
为功能的关键阈值的无符号转化量对应的权重,pw1到pw
n
为功能的关键性能值所对应的无符号转化量对应的权重。
[0065]
那么对于数据异常的整体控制的安全门限控制方程即可表达如下:
[0066]
s=p
×
p
′
j
×
j
′ꢀꢀꢀ
(5)
[0067]
s20:当对应的功能开启时,采集并记录相应功能的关键项数据,并进行备份,每个功能的关键项仅存储上一时刻功能正常时的值,比如时刻t
n
‑1时,对于子功能模块的功能关键项和性能关键项分别放入j
n
‑1和p
n
‑1中,下一时刻t
n
时,则用此刻所得到的新值j
n
和p
n
替代j
n
‑1和p
n
‑1的值:
[0068]
j
n
‑1=[f1
n
‑1,f2
n
‑1,f3
n
‑1,
…
fn
n
‑1]
ꢀꢀꢀ
(6)
[0069]
p
n
‑1=[p1
n
‑1,p2
n
‑1,
…
pn
n
‑1]
ꢀꢀꢀ
(7)
[0070]
j
n
=[f1
n
,f2
n
,f3
n
,
…
fn
n
]
ꢀꢀꢀ
(8)
[0071]
p
n
=[p1
n
,p2
n
,p3
n
,
…
pn
n
]
ꢀꢀꢀ
(9)
[0072]
其中,f1
n
‑1到fn
n
‑1为t
n
‑1时刻功能关键项的无符号转化量,p1
n
‑1到pn
n
‑1为t
n
‑1时刻性能关键项的无符号转化量,f1
n
到fn
n
为t
n
时刻功能关键项的无符号转化量,p1
n
到pn
n
为t
n
时刻性能关键项的无符号转化量。
[0073]
s30:用j
n
和p
n
构成当前时刻的数据异常判定方程如下:
[0074]
s
n
=p
n
×
p
′
j
n
×
j
′ꢀꢀꢀ
(10)
[0075]
并在相应的子功能中对s和s
n
使用如下公式进行比对:
[0076][0077]
其中,δ1,δ2,为对应项的修正系数,修正系数的设置根据子功能的安全测试和数据统计经验得到,s
n
′
表示s
n
在t
n
时刻的导数,s
′
表示s0~s
n
在t
n
时刻的加权平均数。
[0078]
根据q的计算结果将数据溢出状态分级,当q>2时认为数据异常类型为数据完全丢失;当2>q>1时,认为数据异常;当q<1时认为数据在正常的范围内。
[0079]
s40:根据数据状态的监控对比结果进行数据备份和控制;当q<1时,仅对各功能的关键项(j
n
‑1,p
n
‑1,j
n
,p
n
)进行存储备份,当2>q>1时,使用j
n
‑1,p
n
‑1替换控制器中存储的当前值,让电动助力转向控制器中出现数据异常的子功能,维持上一时刻的工作状态;当q>2时,直接将该功能禁用,防止出现不必要的安全问题;
[0080]
在本实施例中,可通过硬件和软件的冗余方案对数据进行备份,从而达到对电动助力转向控制器的监控和备份。
[0081]
s50:导出并读取发生数据异常的子功能的q,j
n
‑1,p
n
‑1,j
n
,p
n
值,进行故障数据解析及控制方法优化,可根据数据分析重新定义δ1,δ2,的值,实现数据异常控制方法的自适应调整。
[0082]
s60:当出现数据异常的子功能模块数量超过预设数量时,对电动助力转向机控制器整体功能进行降级处理。
[0083]
在本实施例中,预设数量的大小可以根据实际需要确定,如图3中的3个,本实施例不做唯一性限定。
[0084]
实施例三
[0085]
如图4所示是本发明实施例提供的一种防止电动助力转向机控制器数据异常的控制装置的结构示意图,包括:
[0086]
阈值设定模块401,用于将电动助力转向机控制器按照功能分为各子功能模块,并
根据各子功能模块的功能分别为各子功能模块设置多项关键阈值;
[0087]
异常判断模块402,用于对已经开启相应功能的子功能模块进行数据监控,结合子功能模块对应的多项关键阈值判断是否存在数据发生异常的子功能模块;
[0088]
异常处理模块403,用于若存在数据发生异常的子功能模块,则确定发生异常的子功能模块的异常级别,并对发生异常的子功能模块按照异常级别指向的功能或性能降级处理。
[0089]
其中,各模块的具体实施方式可以参考上述方法实施例的描述,本实施例将不再复述。
[0090]
需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本发明的目的。
[0091]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。