1.本发明属于园林设备技术领域,具体的涉及一种混合动力的乘驾式割草机。
背景技术:
2.当前乘驾式的割草机大多采用内燃机进行驱动,也有少部分采用铅酸电池作为割草机的驱动系统(以驱动两个行走电机、两个割草电机,共四个电机) 采用铅酸电池,有污染、体积大、重量沉的缺点,一般5千瓦时电量的铅酸电池其重量在112公斤左右。该电池充电时间长、工作时间短成了其发展的瓶颈。随着社会的发展,有限的石油资源和环境污染问题变得日益突出,这使得园林设备电动化越来越引起世界各国政府与社会各界的重视。
3.因此,需要一种新型的乘驾式割草机,以兼顾环保及经济效益。
技术实现要素:
4.为克服上述缺点,本技术的目的之一在于提供一种具有混合动力的乘驾式割草机,以兼顾环保及经济效益。
5.为实现上述目的,本技术采用如下的技术方案:
6.一种混合动力的乘驾式割草机,其特征在于,包括:
7.底盘组件,所述底盘组件配置有割草组件及与割草组件同侧配置的驱动轮组件及万向轮组件,且所述割草组件介于所述驱动轮组件及万向轮组件之间,所述底盘组件上配置有操作杆组件,且所述操作杆组件位于座椅组件的前侧,
8.动力模组,所述动力模组配置于底盘组件,所述动力模组包括复数可充电电池,所述动力模组电性连接双向电机,
9.内燃机,所述内燃机配置于所述动力模组的一侧,
10.所述割草组件包括至少一个刀头,所述刀头通过连接件连接至驱动装置,所述驱动装置通过传输带连接至所述双向电机的输出端和/或所述内燃机的输出端。基于所述双向电机的输出端和/或所述内燃机的输出端的驱动使得所述乘驾式割草机工作于不同的工作模式。
11.在一实施方式中,该割草组件包括:壳体、位于所述壳体的空腔内的第一刀头及第二刀头,所述壳体的一侧配置有排草罩,
12.第一刀头通过第一连接件连接至第一皮带轮,
13.第二刀头通过第二连接件连接至第二皮带轮,
14.所述第一皮带轮及所述第二皮带轮上套接有第一皮带,所述皮带连接至所述双向电机的输出端和/或所述内燃机的输出端,
15.基于所述双向电机的输出端和/或所述内燃机的输出端的旋转带动所述皮带旋转进而带动第一刀头及第二刀头旋转。
16.在一实施方式中,该内燃机包括:输出轴,所述输出轴连接至单向离合器,所述单向离合器连接内燃机皮带轮,
17.所述双向电机包括输出轴,所述输出轴连接电机皮带轮及割草离合器,
18.所述内燃机皮带轮及电机皮带轮上套接有第二皮带,
19.所述割草离合器上设有割草皮带轮,所述割草皮带轮通过第一皮带分别连接至割草组件的第一皮带轮及第二皮带轮,
20.基于第一皮带的驱动带动第一皮带轮及第二皮带轮旋转进而带动起连接的第一刀头及第二刀头旋转以割草。
21.在一实施方式中,该第一皮带轮及第二皮带轮侧分别配置有张紧靠轮。
22.在一实施方式中,该第二皮带上设有张紧靠轮总成。
23.在一实施方式中,该乘驾式割草机还包括:仪表监控操控台,所述仪表监控操控台配置于座椅组件的一侧,所述仪表监控操控台电性连接整车控制器。
24.在一实施方式中,该整车控制器配置于电池模组内。
25.在一实施方式中,该整车控制器配置无线模块,通过所述无线模块以系统软件的在线升级。
26.在一实施方式中,该乘驾式割草机还包括:充电机,所述充电机配置于所述底盘组件上,所述充电机配置于第二驱动电机控制器侧,所述充电机电性连接配置于底盘组件一侧端的插座。
27.有益效果
28.与现有技术相比,本技术提出的割草机既能满足多工况大功率的需要,又能满足长工作时间的需要,能源补给方便、安全维护方便、继承性好、提高了效率、节省了能源。
附图说明
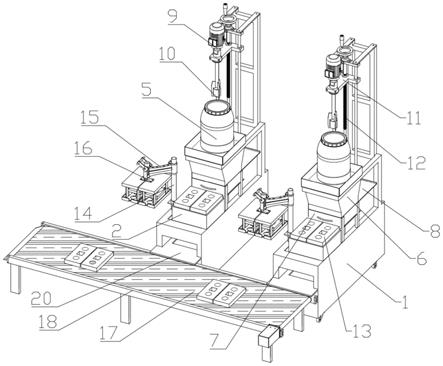
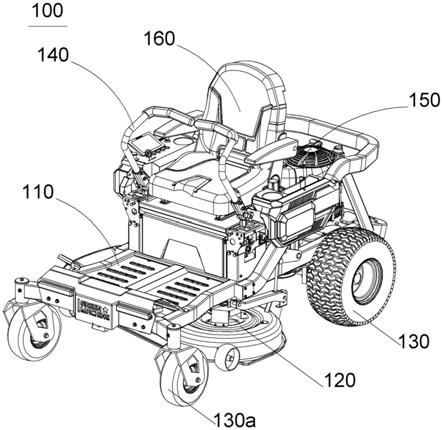
29.图1是本技术实施例的乘驾式割草机的立体结构示意图;
30.图2是本技术实施例的乘驾式割草机的仰视示意图;
31.图3是本技术实施例的乘驾式割草机的底盘组件上的电气布置图;
32.图4是本技术实施例的乘驾式割草机的动力模组的结构示意图;
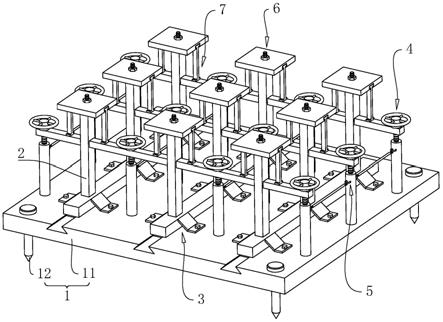
33.图5是本技术实施例的驱动割草组件的结构示意图;
34.图6是本技术实施例的乘驾式割草机的功能模块示意图。
具体实施方式
35.以下结合具体实施例对上述方案做进一步说明。应理解,这些实施例是用于说明本技术而不限于限制本技术的范围。实施例中采用的实施条件可以如具体厂家的条件做进一步调整,未注明的实施条件通常为常规实验中的条件。
36.一种混合动力的乘驾式割草机,该乘驾式割草机包括:底盘组件,其下配置有割草组件及与割草组件同侧配置的驱动轮组件及万向轮组件,底盘组件上配置有座椅组件,座椅组件的前方侧配置有操作杆组件,座椅组件的一侧配置有仪表监控操控台,座椅组件下配置有电池模组,座椅组件的后方侧配置有内燃机。该操作杆组件包括左/右操丛杆,其分别连接匹配的驱动电机,这样通过操控左/右操丛杆进而控制左右驱动电机,平行推动能够保证直线行驶,交叉推动就可以实现驱动差速转向,转弯半径极小(行业称为的零转向)。本实施方式的乘驾式割草机具有其乘驾式零转向、零排放、高效率、机动灵活、运行舒适。本实
施方式的割草机除具备乘驾式零转向功能外,其采用车载锂离子动力电池为驱动能源,运行时优先使用动力电池存储的电能,基于预设的控制策略,控制双向电机发电与电动功能的切换,需要发电时,在小型汽油机带动下再给锂电池充电;如此,割草机可运行于不同的工作模式(纯电动机割草、汽油机割草、发电割草、纯电动及汽油机组合的双动力割草)该系统在成本、功能选择范围、使用安全、便宜、方便等方面比较:既能满足多工况大功率的需要,又能满足长工作时间的需要,能源补给方便、安全维护方便、继承性好、提高了效率、节省了能源。
37.接下来结合图1
‑
6来描述本技术提出的混合动力的乘驾式割草机。
38.该乘驾式割草机100,包括:底盘组件110,其下配置有割草组件120及与割草组件120同侧配置的驱动轮组件130及万向轮组件130a,底盘组件110上配置有座椅组件160,座椅组件160的前方侧配置有操作杆组件140,座椅组件 160的一侧配置有仪表监控操控台140a。座椅组件160下配置有电池模组170,座椅组件160的后方侧配置有内燃机150。该操作杆组件140包括左/右操丛杆,其分别连接匹配的驱动电机,这样通过操控左/右操丛杆进而控制左右驱动电机,平行推动能够保证直线行驶,交叉推动就可以实现驱动差速转向,转弯半径极小(行业称为的零转向)。本实施方式中,利用操作杆组件140操作割草机,在其他的实施方式中,可基于仪表监控操控台140a操作实现自动驾驶(基于乘驾式割草机上配置的传感器和/或雷达摄像头图未示)。
39.该割草组件120,包括:壳体121,位于壳体的空腔内的第一刀头122及第二刀头123,壳体121的一侧配置有排草罩124,通过其用以排出割草组件切割的。
40.驱动轮组件130包括第一驱动轮131及第二驱动轮132,其分别连接至驱动轴(图未示),基于驱动电机的驱动以带动该第一驱动轮131及第二驱动轮132。该第一驱动轮131及第二驱动轮132同轴配置。万向轮组件130a包括:第三驱动轮133及第四驱动轮134,该割草组件120介于驱动轮组件130与万向轮组件 130a之间。
41.该动力模组170(参见图4),包括:壳体171,其内配置有复数规则连接的电芯172,其电性连接的负极端通过负极接触器173引出,正极端通过正极接触器179引出。壳体171内配置有整车控制器174,该整车控制器174电性连接电池管理系统175,壳体171内配置有分流器176,预充电组177及速溶保险装置 178。在一实施方式中,该整车控制器174及电池管理系统175集成在一块pcb 板子上的,并壳体171内部。在一实施方式中,该整车控制器174预配置一无线模块,通过该无线模块系统软件的在线升级(ota升级)。
42.接下来结合图5来描述割草组件120的动作,内燃机151的输出轴151c连接至单向离合器154,该单向离合器154连接内燃机皮带轮,且其通过皮带155 连接电机皮带轮,双向电机152的输出轴152a连接割草离合器157,该电机皮带轮通过单项离合器154与内燃机151的输出轴151c连接,如此以保证内燃机的动力输出;离合器157设有割草皮带轮,其通过皮带125分别连接至割草盘第一皮带轮127与第二皮带轮128,第一皮带轮127与第二皮带轮128侧分别配置有张紧靠轮127。基于皮带125的驱动带动第一皮带轮127与第二皮带轮128 旋转进而带动起连接的第一刀头122及第二刀头123旋转,以进行割草。皮带 155上设有张紧靠轮总成155a。双向电机152的控制器152a电性连接整车控制器174,并基于通信协议进行信息交互。本实施方式中,采用2个刀头,在其它的实施方式中,可采用一个刀头。
43.在一实施方式中,结合图3及图1来描述割草机的电气分布,底盘组件110 上配置
有,动力模组170,其一侧配置有高低压配电箱190及辅助电源170a(该辅助电源170a,用以启动内燃机),用以控制第一驱动轮131的第一驱动电机控制器153a及用以控制第二驱动轮132的第二驱动电机控制器153b,充电机180,其配置于第二驱动电机控制器153b侧,该充电机180电性连接外接交流电源的插座181,该插座181配置于底盘组件110的一侧端(如后侧端,靠近内燃机侧的底盘组件110端部)。
44.接下来结合图6及图2来描述割草件的动作,该割草机的整车控制器电性连接仪表监控操控台、第一驱动轮的第一驱动电机、第二驱动轮的第二驱动电机、电池管理系统及双向电机。通过仪表监控操控台输入(如显示指令,如:显示控制器的工作状态、电流、电压、温度、驱动/割草电机的转数等参数及报警信息),该整车控制器接收并响应该指令将对应的信息反馈至仪表监控操控台。该整车控制器电性连接操作杆组件,接收并响应操作杆组件的操作指令进而控制割草机。在一实施方式中,整车控制器检测电池的电量不足时,启动双向电机发电,给动力电池充电。本技术提出的乘驾式割草机,基于预设的控制模式,其可运行于汽油机割草模式、双动力(内燃机与电池组合)耦合割草模式、发电割草模式、纯电动割草模式、行走发电模式、静止发电模式等多种工作模式,降低了使用成本、提高了效率、给用户提供了更多信息,提供了安全性与使用维护的方便性,相对于有装锂离子电池及增程机的方案,简化了控制策略。采用增加部分装锂离子电池及增程机的方案的实施方式需要额外增加一个发电机组,这样机器上配置有五个电机加一个汽油机,使驱动系统与控制系统更加复杂,浪费资源及成本较高,不便于制造与使用。
45.在本技术中,术语“上”、“下”、“内”、“中”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本技术及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
46.上述实施例只为说明本技术的技术构思及特点,其目的在于让熟悉此项技术的人是能够了解本技术的内容并据以实施,并不能以此限制本技术的保护范围。凡如本技术精神实质所做的等效变换或修饰,都应涵盖在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。