1.本实用新型属于农业机械技术领域,具体涉及一种连续作业大型水果采摘装置。
背景技术:
2.一般大体积水果(如柚子)采用人工采摘的方式,需要采摘人员携带剪刀通过果梯爬到高处采摘,且必须多人配合以保证人员安全,采摘方法较为危险。同时,采摘时需要不断变换果梯的位置来寻找不同位置的果实,效率较低,且采摘后将果实从高处运送到地面也需要大量的人力,需要多个工人同时进行辅助才能将果实顺利入筐。
3.通过对水果采摘地的实地考察,在现阶段还没有一款针对大果实水果的采摘工具,大多采摘方式还是采取最传统的手工摘取,即通过采果梯,人员登梯持剪刀采摘,再通过双手传递果实。通过计算,采用手工采摘的方式,采摘一颗果实到果实入筐的时间在15s左右,不仅效率低下而且人员的安全得不到保障。为了克服以上的问题,目前大多数果农是通过增加采摘人员的方式减少安全隐患和提高生产效率,采用这样的方式虽然一定程度上缓解了现有问题,但是增加了大量的采摘成本。以沙田柚为例,种植一亩地的柚子成本约4500元,其中人工采摘费用就达1800元。人工成本无疑占比很大,因此进行采摘方式的改良很有必要。
4.针对市面上大多数采摘工具的特点进行总结,大多数采摘工具采用抓取式、剪断式等作业方式采摘果实,但这种方式对采摘大型水果果实并不是很合适。经调查发现这些工具的优点是操作简单,缺点是需要精确地对准水果并抓取,而且对水果有一定损害,且目前人工采摘工具大都无法连续作业,也就是一次只能抓取一只水果,抓取后需要将其放下再进行第二次抓取,费时费力。尤其在水果位置过高视野不好的情况下,操作困难,且剪断后水果容易掉落造成损坏。
技术实现要素:
5.针对现有技术的不足,本实用新型提供一种连续作业大型水果采摘装置,可以连续作业,操作简便,提高采摘效率,降低采摘成本。
6.本实用新型是通过以下技术方案实现的:
7.一种连续作业大型水果采摘装置,包括主杆、变径轮盘、握把、牵引活动套筒、果实套筒、刀片、钢丝变向滑轮、勾手、筒口和钢丝;所述钢丝变向滑轮的数量为一个以上,所述主杆为中空状结构,其杆侧壁上设有一个以上的开口,所述钢丝变向滑轮设置在每一个侧壁的开口处;所述主杆的后端设有握把,所述握把通过变径轮盘与所述主杆连接;所述牵引活动套筒和所述果实套筒均套接在所述主杆上,其中,所述牵引活动套筒位于所述主杆的近后端处,所述果实套筒位于所述主杆的近前端处;所述果实套筒上固定有刀片和筒口,所述刀片和所述筒口分别设置于所述果实套筒的上下两侧;所述勾手铰接设置于所述主杆的前端一侧,所述刀片位于所述勾手的同一侧,其刀口方向正对所述勾手,所述筒口位于所述勾手的相对侧;所述钢丝分别连接勾手和牵引活动套筒,以及果实套筒和握把,并分别通过
所述钢丝变向滑轮变向设置于所述主杆的中空状杆内。
8.优选地,所述勾手为分叉状。
9.优选地,所述勾手在所述钢丝的拉动下与所述筒口形成夹角,用于夹住水果。
10.优选地,所述勾手与所述主杆的铰接处设有复位弹簧。
11.优选地,所述钢丝变向滑轮的数量为4个,分别设置于所述主杆的后端靠近握把的侧壁处、所述主杆的侧壁上2个开口处,及所述主杆的前端。
12.优选地,所述刀口为v字型。
13.优选地,所述筒口为喇叭状。
14.本实用新型的有益效果如下:
15.本实用新型的装置先使用主杆前端的勾手对果实进行抓取,勾手的抓取动作由底部的牵引活动套筒控制,由操作员单手完成;再通过装置后方的握把进行操作,当操作员另外一只手按下握把时,果实套筒上的刀片就会对果实的果茎进行切除,同时固定刀片的果实套筒下方的筒口也成功接住果实,一只手松开牵引活动套筒,勾手会在复位弹簧的作用下复位,果实也在此时落入筐中。整个操作时间在2.5s左右,且在一次操作结束后,装置完全复位,可以快速的进行下一次的采摘,大大提高了采摘效率,同时也保护了采摘人员的安全。
附图说明
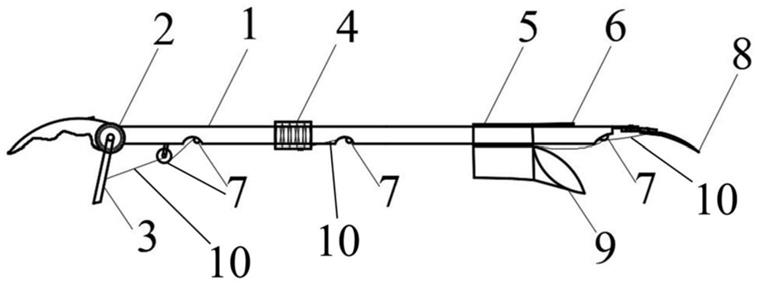
16.图1为连续作业大型水果采摘装置的结构示意图;
17.图2为主杆前端的结构示意图;
18.图2中:(a)为主视图;(b)为俯视图;
19.图3为主杆后端的结构示意图;
20.图3中:(a)为主视图;(b)为俯视图;
21.图中:1、主杆;2、变径轮盘;3、握把;4、牵引活动套筒;5、果实套筒;6、刀片;7、钢丝变向滑轮;8、勾手;9、筒口;10、钢丝。
具体实施方式
22.下面结合附图与实施例对本实用新型做进一步详细说明。
23.实施例1
24.一种连续作业大型水果采摘装置,如图1所示,包括主杆1、变径轮盘2、握把3、牵引活动套筒4、果实套筒5、刀片6、钢丝变向滑轮7、勾手8、筒口9和钢丝10;所述钢丝变向滑轮7的数量为一个以上,所述主杆1为中空状结构,其杆侧壁上设有一个以上的开口,所述钢丝变向滑轮7设置在每一个侧壁的开口处;所述主杆1的后端设有握把3,所述握把3通过变径轮盘2与所述主杆1连接;所述牵引活动套筒4和所述果实套筒5均套接在所述主杆1上,其中,所述牵引活动套筒4位于所述主杆1的近后端处,所述果实套筒5位于所述主杆1的近前端处;所述果实套筒5上固定有刀片6和筒口9,所述刀片6和所述筒口9分别设置于所述果实套筒5的上下两侧;所述勾手8铰接设置于所述主杆1的前端一侧,所述刀片6位于所述勾手8的同一侧,其刀口方向正对所述勾手8,所述筒口9位于所述勾手8的相对侧;如图2、图3所示,所述钢丝10分别连接勾手8和牵引活动套筒4,以及果实套筒5和握把3,并分别通过所述
钢丝变向滑轮7变向设置于所述主杆1的中空状杆内。
25.一种优选的方案,如图2(b)所示,所述勾手8为分叉状。
26.一种优选的方案,如图2(a)所示,所述勾手8在所述钢丝10的拉动下能与所述筒口9形成夹角,用于夹住水果。
27.一种优选的方案,如图2(a)所示,所述勾手8与所述主杆1的铰接处设有复位弹簧。
28.在本实施例中,所述钢丝变向滑轮7的数量为4个,如图1所示,分别设置于所述主杆1的后端靠近握把3的侧壁处、所述主杆1的侧壁上2个开口处,及所述主杆1的前端。
29.本实用新型的连续作业大型水果采摘装置在实际操作中,具体操作步骤如下:
30.(1)“抓”:在采摘柚子或是梨等具有较长果茎的水果时,手握并拉动连接勾手8的牵引活动套筒4,通过钢丝10牵引勾手8,用勾手8的分叉型叉口对准果实的果茎,利用勾手8分叉的形状控制水果的位置,通过拉动牵引活动套筒4使得勾手8向下转动从而使果实位置得到控制。
31.(2)“套”:通过握紧握把3拉动钢线10,通过钢丝变向滑轮7向前拉动果实套筒5,使其下方的喇叭状筒口9套住果实。
32.(3)“切”:果实套筒5向前运动时,其上固定的刀片6随果实套筒5向前运动,当筒口9完全包裹住果实的同时,上方的刀片6切断果茎。果实被勾手8及套筒9形成的夹角完全包裹,完成果实的摘取。
33.(4)成功采摘果实后,释放握把3,果实套筒5将在重力作用下恢复原位置,勾手8由于复位弹簧的作用下恢复原位,此时可以进行第二次采摘作业,进行连续作业。
34.通过一体化单人两步操作,实现了高处大体积水果的快速采摘和收纳,先用牵引活动套筒控制勾手,对果实进行初步的固定,同时也用刀片将果实与果茎完美分离,防止在采摘时刀片破坏果实的情况发生,不仅突破了传统的剪刀式采摘方式,采用了刀片和套筒的整体动能割断果茎,加快了采摘的速率,而且通过对果实形状和质量的研究设计出了独有的喇叭型果实套筒,可以在果茎割断的同时接住果实,并且在完成收纳后勾手和套筒都恢复了原位置,以便进行下一步的操作。
35.使用了两步一体化的操作,每步都相互衔接,且操作简单,只需通过单人双手完成操作,采摘的整个过程只需单人完成,整个装置主体上为一个杆件,在前端设有勾手、果实套筒、刀片等,后端设有牵引活动套筒、握把、变径轮盘等,前后连接通过特质的钢丝和滑轮。
36.勾手是通过在装置近后端的牵引活动套筒控制的,在下拉套筒时,勾手会抓取水果靠近套筒。在松开牵引活动套筒时,由于前端勾手处的复位弹簧的作用,果实套筒和勾手都能恢复原位置,以便进行二次操作。
37.套筒设计采取了喇叭口造型,通过不断的改变形状,得到了一种完美的迎合果实外形的套筒前部结构,可以完美接住果实且不会阻碍勾手的动作。刀片刀口形状也进行了相关探究,以v字型的刀口形状尤为合适。
38.果实套筒的运动主要通过后端握把的控制,通过变径轮盘将握把的作用大规模提高,使得果实套筒和刀片获得一定的动能,从而快速的摘下果实,松开握把后由于重力作用下果实套筒和刀片再次恢复到原位置。
39.本实用新型的装置致力于提高采摘人员的采摘效率,保护采摘人员的人身安全,
降低果农的生产成本,且装置尤为简单,制作成本低廉,适合批量生产,大规模使用投入。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。