1.本发明涉及一种倒渣的方法和系统,尤其涉及一种自动倒渣的方法和系统。
背景技术:
2.目前在世界范围内,各大钢厂转炉冶炼基本都采用模型炼钢,实现吹炼这一过程的一键操作,且随着转炉自动出钢技术也纷纷投入使用,转炉的出钢过程也由人工操作的方式转变为自动操作。在转炉冶炼中,有一种称作“转炉留渣工艺”被广泛地应用在转炉炼钢技术中。该工艺是利用上一炉终渣的氧化铁和氧化钙,降低钢铁料消耗和辅料消耗,同时有利于下一炉前期渣的形成,有助于前期脱磷。该工艺的特点是在倒渣时并不是把所有的炉渣全部倒出,而是保留一定量的炉渣,供下一炉冶炼使用。
3.通常采用留渣工艺的转炉倒渣包括以下操作步骤:
4.1)将渣罐车(也称为渣包车)开到承接炉渣位置;
5.2)倾转转炉,转炉内的炉渣从大炉口倾倒出来;
6.3)操作渣罐车使得炉渣倒入车上的渣罐内;
7.4)达到钢种“留渣工艺”的目标留渣量的要求,停止倒渣;
8.5)回摇转炉到垂直位置,完成整个倒渣过程。
9.需要指出的是,炉渣的粘度与钢种冶炼特点和造渣工艺有关。炉渣的粘度不同,炉渣流出的速度和落点位置也就不同。因此在现有转炉倒渣步骤中,目前都是依靠人工操作转炉倾转,同时观察流渣的落点来移动渣罐车位置,以确保转炉的倾转与台车的走行精准匹配。
10.然而,这样的操作对操作工人的技术要求较高,存在由于操作工人操作不当导致炉渣倒到渣罐外面,进而引起安全事故的风险。此外,倒渣过程中会产生烟雾和喷溅,对于人员安全防护有较高的要求。
11.公开号cn103397134a,公开日为2013年11月20日,名称为“一种根据倾转角度计算留渣量的方法”的中国专利文献公开了一种计算留渣量的方法。该方法是在吹炼结束后,记录倒渣时转炉内渣将出不出时的临界角度
ɑ
,得到炉内熔融体的总体积,通过副枪测量钢水液面高度,得到转炉内钢水体积,记录倒渣结束后转炉倾动角度β,得到剩余熔融体总体积,最后结合炉衬测量系统提供的炉衬侵蚀数据,计算出倒渣前炉内熔融体的总体积和倒出渣的体积,二者之差即为转炉内留渣的体积。根据熔渣的密度,可以计算出留渣量。该方法不需要增加额外的监测和称量设备。
12.公开号cn107502698a,公开日为2017年12月22日,名称为“适用于少渣冶炼的自动化炼钢方法”的中国专利文献公开了一种倒渣和留渣计算模型。倒渣模型:在原来的自动化炼钢模型基础上增加前期渣的热、氧平衡计算,添加前期目标碱度,将根据现场冶炼数据和实验室模拟,得出倒前期渣的最佳时间区间加入到模型的前期吹炼控制中,根据铁水不同成分计算不同的吹炼时间。留渣模型的建立是在渣车上增加渣重称量装置,采集前期、终点倒渣的重量,并将该数据通过一级传递至自动化炼钢模型。
13.需要说明的是,上述现有技术中,虽然公开了倒渣和留渣的模型,但模型的目的仅仅是为了改进转炉留渣工艺,并没有涉及到转炉留渣工艺如何实现自动倒渣。现有技术中虽然存在转炉自动出钢技术,但并未涉及到转炉全自动倒渣技术。转炉自动倒渣是将转炉的热态炉渣从转炉的大炉口倒出,转炉自动出钢是将钢水从转炉的出钢口倒出。虽然两者都是自动倾转转炉,台车自动走行,有相似之处,但两种技术具有本质的不同。因此需要采用新的技术来控制实现转炉留渣工艺自动倒渣。
技术实现要素:
14.本发明的目的之一在于提供一种转炉留渣工艺自动倒渣的方法,该转炉留渣工艺自动倒渣的方法操作简单准确,安全可靠,适用性广泛,可以有效替代现有技术的人工操作方法,有效提高了倒渣成功率,缩短倒渣时间,并且减少相关操作人员的劳动强度,降低潜在的事故发生概率,改善工作环境。
15.为了实现上述目的,本发明提出了转炉留渣工艺自动倒渣的方法,其包括步骤:
16.(1)基于转炉冶炼过程中产生的炉渣重量g1以及采用留渣工艺冶炼中目标留渣量g2,确定目标倒渣量g0=g
1-g2;
17.(2)采集并存储转炉倒渣过程中渣流的实时图像;
18.(3)基于图像识别以确定渣流的特征边界;
19.(4)基于渣流的特征边界,在渣流从转炉炉口落到渣罐中的路径中选取跟踪区域;
20.(5)实时计算所述跟踪区域内的渣的面积s
i
,并且实时检测渣罐内的炉渣重量g
i
;
21.(6)当所述跟踪区域内的渣的面积s
i
>设定的检测阈值s
min
后,基于渣罐内的炉渣重量g
i
,控制转炉实时倾转角速度ω
i
,并且根据所述实时倾转角速度获得转炉实时倾转角度,基于转炉实时倾转角度计算渣罐的实时走行位移,以使渣罐实时承接转炉倒出的炉渣;
22.(7)当检测到渣罐内的炉渣重量g
i
达到目标倒渣量g0或二者具有允许的偏差量时,停止转炉倾转并启动转炉回摇。
23.需要说明的是,本技术方案中提及的“渣罐”也可以称为“渣包”,二者的概念是可以互换的。
24.在本发明所述的上述技术方案中,本发明所述的转炉留渣工艺自动倒渣的方法可以通过图像识别确定倒渣开始,根据渣罐重量的变化率来控制转炉自动倾转的角速度,实现自动倾转;根据实时的倾转角度与渣罐台车走行的位移模型,可以实现渣罐台车自动走行,并实现了转炉自动倾转与台车自动走行的精准匹配。该方法操作简单准确,安全可靠,适用性广泛,可以有效替代现有技术的人工操作方法,提高倒渣成功率,缩短倒渣时间,并且减少了相关操作人员的劳动强度,降低潜在的事故发生概率,改善了工作环境。
25.进一步地,在本发明所述的转炉留渣工艺自动倒渣的方法中,在步骤(2)中,所述实时图像包括:可见光图像、红外图像和远红外图像的其中之一。
26.进一步地,在本发明所述的转炉留渣工艺自动倒渣的方法中,在步骤(5)中,对所述跟踪区域内的图像进行逐行逐像素扫描,将每个像素点的面积求和,以得到所述跟踪区域内的渣的面积。
27.进一步地,在本发明所述的转炉留渣工艺自动倒渣的方法中:
28.当所述跟踪区域内的渣的面积s
i
≤设定的检测阈值s
min
时,控制转炉的倾转角速
度为设定的第一角速度ω1,此时ω
i
=ω1;
29.当所述跟踪区域内的渣的面积s
i
>设定的检测阈值s
min
时,控制转炉的倾转角速度为设定的第二角速度ω2,且ω2<ω1,此时ω
i
=ω2;
30.当所述跟踪区域内的渣的面积s
i
>设定的检测阈值s
min
后,并且渣罐内的炉渣重量g
i
满足以及|g
i-g0|>g
min
,控制转炉实时倾转角速度其中t表示转炉倒渣时间;g
min
表示炉渣重量的允许偏差量,其为设定值;k1表示设定的炉渣重量的变化率;b表示调节系数,其取值范围为0<b≤1;当渣罐内的炉渣重量g
i
满足以及|g
i-g0|>g
min
时,控制转炉实时倾转角速度ω
i
=0。
31.进一步地,在本发明所述的转炉留渣工艺自动倒渣的方法中,在步骤(6)中,按照下述模型控制渣罐的实时走行位移x
i
:
32.x
i
=x0 βθ
i
33.其中,x0表示走行初始位置;β表示调节系数,其取值范围为0.01~0.1,单位参量为米/度;θ
i
=θ0 ω
i
t,其中θ
i
表示转炉实时倾转角度,θ0表示转炉初始倾转角度,t表示转炉倒渣时间。
34.上述方案中,根据模型可以确定渣罐的行走位移量x
i
,位置的实时变化,进而可以向渣罐台车输出台车行走量,从而使渣罐台车可以随着渣流位置的变化而行走,使渣罐台车可以准确地承接渣流。
35.相应地,本发明的另一目的在于提供一种转炉留渣工艺自动倒渣的系统,使用该转炉留渣工艺自动倒渣的系统进行倒渣除了可以替代现有技术的人工倒渣操作方法外,还可以有效提高倒渣成功率,缩短倒渣时间,提高倒渣的安全性,降低潜在的事故发生概率,改善工作环境。
36.为了实现上述目的,本发明提出了一种转炉留渣工艺自动倒渣的系统,其包括:
37.转炉;
38.转炉倾转驱动装置,其与所述转炉连接,以驱动转炉倾转,执行倒渣动作;
39.转炉倾角测量装置,其用于测量转炉的倾角;
40.渣罐,其设于渣罐台车上;
41.渣罐台车位置检测装置,其检测渣罐和渣罐台车的走行位置;
42.重量传感器,其设于所述渣罐台车上,以检测渣罐内的炉渣重量;
43.图像采集装置,其采集转炉倒渣过程中渣流的实时图像;
44.图像处理模块,其对所述实时图像进行处理;
45.存储模块,其存储所述实时图像和/或经过图像处理模块处理的实时图像;
46.图像识别和计算模块,其对实时图像进行识别以确定渣流的特征边界,并实时计算选定的跟踪区域内的渣的面积;
47.控制模块,其与所述转炉倾转驱动装置、转炉倾角测量装置、渣罐台车、渣罐台车位置检测装置、重量传感器和图像识别和计算模块分别连接,所述控制模块被设置为:当所述跟踪区域内的渣的面积s
i
>设定的检测阈值s
min
后,基于渣罐内的炉渣重量g
i
,控制转炉实时倾转角速度ω
i
,并且根据所述实时倾转角速度获得转炉实时倾转角度,基于转炉实时
倾转角度计算渣罐的实时走行位移,以使渣罐实时承接转炉倒出的炉渣;当检测到渣罐内的炉渣重量g
i
达到目标倒渣量g0或二者具有允许的偏差量时,停止转炉倾转并启动转炉回摇。
48.进一步地,在本发明所述的转炉留渣工艺自动倒渣的系统中,还包括生产过程计算机系统,其与所述控制模块连接,所述生产过程计算机系统向控制模块发送转炉冶炼数据。
49.在上述方案中,本发明所述的转炉留渣工艺自动倒渣的系统中还包括生产过程计算机系统,生产过程计算机系统与控制模块连接,可以向控制模块发送转炉冶炼数据。生产过程计算机系统内可以存储相应的冶炼信息,通过生产过程计算机系统中的相关信息可以采用本领域现有技术中常用的计算方法计算获得总的炉渣重量,并获得留渣工艺中目标的留渣量,从而可以获得目标的倒渣量。
50.进一步地,在本发明所述的转炉留渣工艺自动倒渣的系统中,所述图像采集装置包括可见光摄像机、红外摄像机以及远红外摄像机的其中之一。
51.进一步地,在本发明所述的转炉留渣工艺自动倒渣的系统中,所述转炉倾角测量装置包括编码器或倾角仪。
52.进一步地,在本发明所述的转炉留渣工艺自动倒渣的系统中,渣罐台车位置检测装置包括非接触式测距仪。
53.相较于现有技术,本发明所述的转炉留渣工艺自动倒渣的方法和系统具有如下所述的优点以及有益效果:
54.本发明所述的转炉留渣工艺自动倒渣的方法操作简单准确,安全可靠,适用性广泛。除了可以替代现有技术的人工操作方法外,还可以有效提高倒渣成功率,缩短倒渣时间,并且减少相关操作人员的劳动强度,降低潜在的事故发生概率,改善工作环境。
55.此外,本发明所述的转炉留渣工艺自动倒渣系统也同样具有上述的优点以及有益效果。
附图说明
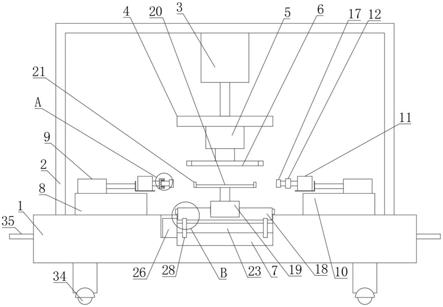
56.图1示意性地显示了本发明所述的转炉留渣工艺自动倒渣系统在一种实施方式下的结构。
57.图2为本发明所述的转炉留渣工艺自动倒渣方法在一种实施方式下的步骤流程示意图。
58.图3示意性地显示了本发明所述的转炉留渣工艺自动倒渣系统在一种实施方式下的操作流程。
具体实施方式
59.以下将根据本发明的具体实施例以及说明书附图对本发明所述的转炉留渣工艺自动倒渣的方法和系统作进一步的说明,但是该说明并不构成对本发明的不当限定。
60.图1示意性地显示了本发明所述的转炉留渣工艺自动倒渣系统在一种实施方式下的结构。
61.如图1所示,在本实施方式中,转炉与转炉倾转驱动装置连接,转炉倾转驱动装置
驱动转炉倾转,以执行倒渣动作;
62.当转炉开始倒渣操作时,倾转转炉,使转炉可以从垂直位倾转到与地面成一定角度的倒渣位,倾转角度可以被转炉倾角测量装置测量,测量转炉倾角的转炉倾角测量装置可以包括编码器或倾角仪。
63.当转炉倾转倒渣位后,转炉开始倒渣操作,转炉中的转炉渣可以从转炉的大炉口中流入到渣罐台车(也称为渣包台车)上的渣罐(也称为渣包)内。其中,在执行倒渣操作时,渣罐台车上安装的重量传感器可以实时检测流入到渣罐(也称为渣包)内的炉渣的重量。此外,图像采集装置可以采集转炉在倒渣过程中的热态渣流的实时图像,并且可以将采集到的实时图像数据传输至计算机系统,计算机系统可以包括图像处理模块、存储模块、图像识别和计算模块以及控制模块。此外,本发明所述的转炉留渣工艺自动倒渣系统可以包括渣罐台车位置检测装置,渣罐台车位置检测装置可以包括非接触式测距仪。渣罐台车位置检测装置可以与计算机系统中的控制模块连接,以实现对渣罐台车位置的实时监控,检测渣罐和渣罐台车的走行位置,进而使得渣罐台车始终对准渣流。
64.此外,在本发明所述的转炉留渣工艺自动倒渣的系统中,还包括生产过程计算机系统,生产过程计算机系统可以与计算机系统中的控制模块连接,并可以向控制模块发送转炉冶炼数据。
65.需要说明的是,图像处理模块可以对热态渣流的实时图像进行处理,将热态渣流实时图像转换为灰度图,并可以对灰度图进行二值化处理。存储模块可以存储图像采集装置传输的渣流的实时图像以及经过图像处理模块处理的实时图像。图像识别和计算模块可以对实时图像进行识别,确定渣流的特征边界,并实时计算选定的跟踪区域内的渣的面积,在使用时,图像识别和计算模块可以先确定一个跟踪的目标区域,当渣流通过该区域后,从经过二值化处理的图像中确定热态渣流的特征边界,并可以基于该特征边界实时计算获得跟踪区域内渣的面积,可以实现对热态渣流的动态跟踪。控制模块可以与转炉、转炉倾角测量装置、渣罐台车、渣罐台车位置检测装置、重量传感器和图像识别和计算模块分别连接,控制模块可以基于热态渣流和炉渣重量的实时变化,向转炉倾转的控制系统输出倾转的角速度,自动控制转炉的倾转,同时控制模块也可以根据台车走行位置模型,计算出实时的位置,并向渣罐台车输出行走量,渣罐台车的马达驱动渣罐台车走行,以使渣罐台车始终能承接转炉倾倒的热态渣流。
66.还需要说明的是,由于热态渣流温度和颜色与周围环境的温度和颜色差别很大,图像采集装置可以是可见光摄像机,也可以是红外摄像机,还可以是远红外摄像机,都可以实现采集转炉倒渣过程中渣流的实时图像,由存储模块存储所采集到的实时图像,存储模块可以将图像采集装置连续记录的文件以数字格式存储,从而方便后续的处理。
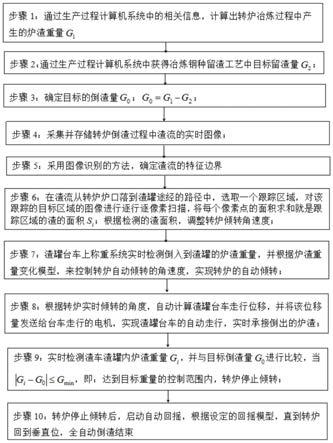
67.图2为本发明所述的转炉留渣工艺自动倒渣方法在一种实施方式下的步骤流程示意图。
68.如图2所示,在该实施方式中,本发明所述的转炉留渣工艺自动倒渣方法可以包括如下步骤:
69.步骤1:通过生产过程计算机系统中的相关信息,计算出转炉冶炼过程中产生的炉渣重量g1;
70.在步骤1中,生产过程计算机系统可以存储相应的冶炼信息,通过生产过程计算机
系统中的相关信息可以采用本领域现有技术中常用的计算方法计算获得炉渣重量g1。本领域现有技术中常用的计算方法可以包括:锰元素平衡法、磷元素平衡法以及根据石灰、白云石或者矿石加入量等计算获得炉渣重量g1。
71.步骤2:通过生产过程计算机系统中获得冶炼钢种留渣工艺中目标留渣量g2;
72.在步骤2中,可以通过生产过程计算机系统直接读取留渣冶炼的工艺要求的目标留渣量,目标留渣量是由留渣冶炼工艺所确定。
73.步骤3:确定目标的倒渣量g0;g0=g
1-g2;
74.步骤4:采集并存储转炉倒渣过程中渣流的实时图像;
75.步骤5:采用图像识别的方法,确定渣流的特征边界;
76.步骤6:在渣流从转炉炉口落到渣罐途经的路径中,选取一个跟踪区域,对该跟踪的目标区域的图像进行逐行逐像素扫描,将每个像素点的面积求和就是跟踪区域的渣的面积s
i
;根据检测的渣面积,调整转炉倾转角速度;
77.步骤7:渣罐台车上称重系统实时检测倒入到渣罐的炉渣重量,并根据炉渣重量变化模型,来控制转炉自动倾转的角速度,实现转炉的自动倾转;
78.步骤8:根据转炉实时倾转的角度,自动计算渣罐台车走行位移,并将该位移量发送给台车走行的电机,实现渣罐台车的自动走行,实时承接倒出的炉渣;
79.步骤9:实时检测渣车渣罐内炉渣重量g
i
,并与目标倒渣量g0进行比较,当|g
i-g0|≤g
min
,即:达到目标重量的控制范围内,转炉停止倾转;
80.在步骤9中,需要说明的是,g
i
表示渣罐内炉渣的实时重量,g0表示目标倒渣量,g
min
表示炉渣重量控制的允许偏差量。g
i
、g0和g
min
以及步骤3中的g1与g2这些重量的单位参量均可以为千克(kg)。
81.步骤10:转炉停止倾转后,启动自动回摇,根据设定的回摇模型,直到转炉回到垂直位,全自动倒渣结束。
82.另外,需要注意的是,基于图像识别确定渣流的特征边界,可以采用本领域内已知的多种图像边界识别方法,在本实施例中,采用的只是其中一个可实施的方法。例如,可以将渣流的实时图像转换为灰度图,由于倒渣过程的环境差,有烟尘,图像并不清晰,因而,可以对灰度图进行图像增强,例如可以采用现有技术中的梯度锐化方法进行图像增强。随后可以对灰度图进行去噪声处理和二值化处理,其中,去噪声处理可以采用基于离散余弦变换的图像去噪算法进行去噪声处理,因为图像的噪声在离散余弦变换结果中处在其高频部分,幅值一般很小,因而,可以实现图像的噪声抑制。二值化处理可以采用专门的函数程序进行处理,例如可以采用metlab或是openvc,或是本领域内技术人员知晓的其他方式。
83.需要说明的是,目标对象的选取位置可以在热态渣流流经的路径上,跟踪的目标可以用固定的方框选定,然后确定目标的特征边界,由于热态渣流颜色和温度与背景环境的温度和颜色差别很大,可以将热态渣流与背景交界位置作为特征边界。在步骤5中,为了准确确定边界位置,可以采用数学算法对特征边界进行检测。边界检测的算法可以采用现有技术,如laplace算子、sobel算子或canny算子。在步骤6中,可以对图像进行逐行逐像素扫描,获得整个图像上各个像素点的热态渣流位置识别值,进而可以对选定区域内渣流所占像素求和,算出在该目标选定区域内渣流的面积s
i
。
84.图3示意性地显示了本发明所述的转炉留渣工艺自动倒渣系统在一种实施方式下
的操作流程。
85.如图3所示,在本实施方式中,转炉位置在垂直位,确认渣罐台车已经在起始位置清零(即0位),渣罐台车的显示重量清零(重量为0kg),转炉终止吹炼,并且相关系统的设备及公辅条件满足倒渣条件。点击“自动倒渣开始”按钮,转炉根据倾转模型,自动倾转,在倒渣处安装的图像采集装置可以实时将热态渣流的视频记录下来,并将信号传输到计算机系统的存储模块进行数字化连续存储。
86.在该实施方式中,可以具体按照如下步骤实施:
87.在进行转炉倒渣操作时,按下转炉“自动倒渣开始”按钮,转炉自动倾转,转炉倾转的角度根据公式(1)的模型自动倾转:
88.即θ
i
=θ0 ω
i
t(1),其中θ
i
表示转炉实时倾转角度,θ0表示转炉初始倾转角度,其单位可以是度(
°
),t表示转炉倒渣时间,其单位可以是秒(s);ω
i
表示不同时刻的倾转角速度,其单位可以是度/秒(
°
/s)。此时,转炉以ω1第一角速度开始倾转,转炉倾转角度为θ1=ω1t,其单位可以是度(
°
)。
89.实时计算跟踪区域内渣的面积,当有热态渣从转炉炉口流出后,进入到设定的跟踪区域内,此时用图像识别方法可以计算出跟踪区域渣的面积s
i
。
90.当检测到s
i
>s
min
时,说明有热态渣流入到跟踪区域范围内。其中,s
min
表示设定的检测阈值,技术人员可以根据实际应用中的需要选取和设定相应的s
min
。此时,控制转炉的电机,转炉倾转的角速度ω
i
=ω2,第二角速度ω2根据不同转炉结构、倾转电机特性以及操作习惯确定,且ω2<ω1。
91.此时,实时监测渣罐内炉渣的重量,若渣罐内的炉渣重量g
i
满足并且|g
i-g0|>g
min
。
92.则转炉实时倾转的角速度
93.其中,公式(2)中,t表示转炉倒渣时间,其单位可以为秒(s);k1表示设定的炉渣重量的变化率,其单位可以为千克/秒(kg/s);b表示调节系数,其取值范围为0<b≤1,b可以根据具体转炉设备结构以及生产的生产实际情况调整,ω
i
和第一角速度ω1与第二角速度ω2这些角速度的单位参量均可以为度/秒(
°
/s)。
94.此时,实时监测渣罐内炉渣的重量,若渣罐内的炉渣重量g
i
满足并且|g
i-g0|>g
min
,转炉在当前位置停止,ω
i
=0;
95.此外,随着转炉倾转角度的变化,渣车行走位移量x
i
可以基于公式(3)的模型进行控制:
96.x
i
=x0 βθ
i
(3),其中,x0表示走行初始位置;β表示调节系数,其取值范围为0.01~0.1,单位参量可以为米/度(m/
°
)。
97.根据模型确定的渣车行走位移量x
i
,根据计算的位置的实时变化,可以向台车输出台车行走量,以使台车随着渣流位置的变化而行走,以准确承接转炉倾倒的热态渣。
98.当炉渣的重量满足公式|g
i-g0|≤g
min
的条件时,即渣罐内的炉渣重量gi达到目标
倒渣量g0或二者具有允许的偏差量时,停止倒渣,将信号发给转炉倾转的电机,转炉开始回摇到垂直位。回摇可以根据公式(4)模型进行控制:θ
i
=θ
max-ω
i
t(4),其中θ
max
表示倒渣结束的转炉角度,其单位可以是度(
°
),ω
i
表示回摇时转炉角速度,t表示抬炉时间,其单位可以为秒(s)。
99.需要说明的是,本领域内技术人员根据各工厂的转炉容量、结构以及操作工艺设置转炉倾转角速度ω
i
的数值。转炉倾角可以在360
°
范围内自由旋转,倾角角度正负或倾角位置定义根据各个生产线上的操作习惯各有不同,但其设置并不影响函数模型的设置,也就是说,该函数模型适用性广,可以有效适用于各个生产线。
100.综上所述可以看出,本发明所述的转炉留渣工艺自动倒渣的方法可以通过图像识别确定倒渣开始,根据渣罐重量的变化率来控制转炉自动倾转的角速度,实现自动倾转;根据实时的倾转角度与渣罐台车走行的位移模型,可以实现渣罐台车自动走行,并实现了转炉自动倾转与台车自动走行的精准匹配。该方法操作简单准确,安全可靠,适用性广泛,可以有效替代现有技术的人工操作方法,提高倒渣成功率,缩短倒渣时间,并且减少了相关操作人员的劳动强度,降低潜在的事故发生概率,改善了工作环境。
101.此外,本发明所述的转炉留渣工艺自动倒渣方法也同样具有上述的优点以及有益效果。
102.需要说明的是,本发明的保护范围中现有技术部分并不局限于本技术文件所给出的实施例,所有不与本发明的方案相矛盾的现有技术,包括但不局限于在先专利文献、在先公开出版物,在先公开使用等等,都可纳入本发明的保护范围。
103.此外,本案中各技术特征的组合方式并不限本案权利要求中所记载的组合方式或是具体实施例所记载的组合方式,本案记载的所有技术特征可以以任何方式进行自由组合或结合,除非相互之间产生矛盾。
104.还需要注意的是,以上所列举的实施例仅为本发明的具体实施例。显然本发明不局限于以上实施例,随之做出的类似变化或变形是本领域技术人员能从本发明公开的内容直接得出或者很容易便联想到的,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。