1.本发明属于关节机器人、道具、玩具技术领域,具体涉及一种连续体仿生机械尾巴。
背景技术:
2.不同的动物,尾巴对它们来说有不同的用途。袋鼠在跳跃和休息时用尾巴来保持平衡。猴子用它们的尾巴吊在树上,就好像把尾巴当成了另一条手臂。啮齿类动物也有帮助它们保持平衡的长尾巴,而松鼠还可以把它的尾巴当成掩蔽物,其具有较高的科研价值。
3.目前市场上所销售的道具装饰类玩具其结构过于简单,其仅能够实现尾巴整体的左摆和右摆,无法随体态变化而变化,趣味性低且无法模拟真正动物尾巴的动作,很容易让人失去兴趣。
技术实现要素:
4.本发明的目的在于解决现有的连续体仿生机械尾巴自由度少、结构重、成本高等的问题。提供一种利用3d打印技术制造多连续体单元及其组合方式,并且结合体感控制使得该连续体仿生机械尾巴灵活自如。
5.本发明的技术方案是:
6.一种连续体仿生机械尾巴,由控制箱单元、电机仓单元、虎克铰连续体单元、转接头、球铰连续体单元和绳张紧装置组成;所述控制箱单元与电机仓单元的一端连接,用于控制电机仓单元运行;
7.所述电机仓单元的另一端和虎克铰连续体单元的一端连接,用于驱动虎克铰连续体单元和球铰连续体单元的运动;
8.所述虎克铰连续体单元的另一端通过所述转接头和球铰连续体单元的一端转动连接,用于摆动的仿生机械尾巴;
9.所述球铰连续体单元的另一端和绳张紧装置连接。
10.首先是控制箱单元部分是由左固定卡槽、右固定卡槽、电池盒、快速电源插头、电池接口卡槽、电源开关、控制板、电池和控制箱外壳组成。其中左固定卡槽、右固定卡槽分别安装在控制箱外壳左右两侧,控制板设置在控制箱单元内部的下侧,所述控制板上集成了六轴运动传感器;电池设置在控制箱单元内部的上侧,电源开关设置在与右固定卡槽同侧的控制箱外壳,至此完成对控制箱单元的组成。
11.其次是电机仓单元部分是由电机仓前盖、第一电机、第二电机、电机固定座、第一线绳绞盘、第二线绳绞盘、电机仓后盖、快速电源插头和电机仓外壳组成。其中电机仓前盖和电机仓后盖分别连接在电机固定座前端和后端,第一电机、第二电机固定在电机固定座上,第一线绳绞盘、第二线绳绞盘再分别固定在第一电机和第二电机的转轴上,由此完成电机仓单元的设置。
12.接下来是虎克铰连续体单元是由多个单体虎克铰模块构成;单体虎克铰模块是由
十字铰链、第一铰链座、第二铰链座构成,再由单体虎克铰模块和弹性棒进行多端体组合构成虎克铰连续体单元;其中十字铰链、第一铰链座、第二铰链座串联拼接成单体虎克铰模块,再取四个单体虎克铰模块再串联拼接成虎克铰连续体单元。
13.接下来是转接头:转接头的作用是连接虎克铰连续体单元和球铰连续体单元,其机构上兼容两种虎克铰连续体单元和球铰连续体单元的接口。
14.接下来是球铰连续体单元是由软胶棒和多个单体球铰串联而成。其中软胶棒由3d打印技术与单体球铰配做而成,单体球铰是由3d打印技术一体打印成型,由软胶棒和单体球铰拼接形成。
15.接下来是绳张紧装置由张紧滑块、张紧座和张紧螺丝组合而成。其中张紧滑块与张紧螺丝串联安装在张紧座座上。
16.按照顺序将控制箱单元、电机仓单元、虎克铰连续体单元、转接头、球铰连续体单元和绳张紧装置拼接组成连续体仿生机械尾巴,其中第一电机和第二电机直接驱动第一线绳绞盘、第二线绳绞盘直接控线绳驱动,线绳通过电机仓后盖中穿线绳结构后线绳穿过虎克铰连续体单元中的单体虎克铰模块侧孔,之后线绳穿过转接头侧孔,再之后穿过球铰连续体单元中的单体球铰,最后线绳汇聚到线绳张紧装置,控制连续体仿生机械尾巴运动。
17.本发明相比现有技术具有以下优点:
18.本发明通过提供一种连续体仿生机械尾巴,通过第一电机和第二电机带动连续体仿生机械尾巴运动,灵活度高、驱动效率高;且连续体仿生机械尾巴的结构紧凑、重量轻成本低;该连续体仿生机械尾巴可以根据六轴运动传感器反馈的信息随身体运动而摆动,增加仿生机械尾巴的趣味性。
附图说明
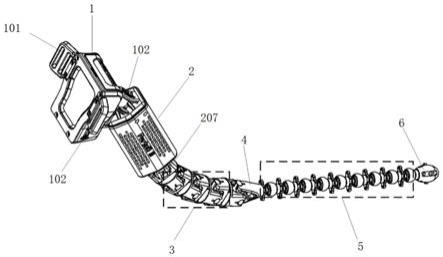
19.图1是本发明的一种连续体仿生机械尾巴整体结构图。
20.图2中的a、b、c、d分别是本发明中控制箱单元的立体图、俯视图、正视图、左视图。
21.图3是本发明的一种连续体仿生机械尾巴的电机仓单元外形图。
22.图4中的a、b分别是本发明中电机仓单元内部侧视图和俯视图。
23.图5是本发明的一种连续体仿生机械尾巴的虎克铰连续体单元结构图。
24.图6是本发明的一种连续体仿生机械尾巴的转接头结构图。
25.图7是本发明的一种连续体仿生机械尾巴的球铰连续体单元结构图。
26.图8是本发明的一种连续体仿生机械尾巴的张紧装置结构图。
27.图中标号:1、控制箱单元;101、左固定卡槽;102、右固定卡槽;103、电池盒;104、快速电源插头;105、电池接口卡槽;106、电源开关;107、控制板;108、电池;109、控制箱外壳;
28.2、电机仓单元;201、电机仓前盖;202、第一电机;203、第二电机;204、电机固定座;205、第一线绳绞盘;206、第二线绳绞盘;207、电机仓后盖;208、快速电源插头;209、电机仓外壳;
29.3、虎克铰连续体单元;301、十字铰链;302、第一铰链座;303、第二铰链座;304、单体虎克铰模块;
30.4、转接头;5、球铰连续体单元;501、软胶棒;502、单体球铰;
31.6、绳张紧装置;601、紧滑块;602、张紧座;603、张紧螺丝。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例
34.请参阅图1
‑
8,一种连续体仿生机械尾巴基本组合是由控制箱单元1、电机仓单元2、虎克铰连续体单元3、转接头4、球铰连续体单元5和绳张紧装置6组成;控制箱单元1与电机仓单元2的一端连接,可以通过六轴运动传感器反馈的信息来控制电机仓单元2运行;电机仓单元2的另一端和虎克铰连续体单元3的一端连接,用于驱动虎克铰连续体单元3和球铰连续体单元5的运动;虎克铰连续体单元3的另一端通过所述转接头4和球铰连续体单元5的一端转动连接,用于摆动的仿生机械尾巴。
35.首先是控制箱单元1部分是由左固定卡槽101、右固定卡槽102、电池盒103、快速电源插头104、电池接口卡槽105、电源开关106、控制板107、电池108和控制箱外壳109组成。其中左固定卡槽101、右固定卡槽102分别安装在控制箱外壳109左右两侧,控制板107设置在控制箱单元1内部的下侧,电池108设置在控制箱单元1内部的上侧,电源开关106设置在与右固定卡槽102同侧的控制箱外壳109,至此完成对控制箱单元的组成。
36.在控制板107上集成了六轴运动传感器,可以同时检测三轴加速度与三轴角速度的运动数据,经过数据处理后,向控制板主控返回当前的姿态角度(偏航角,俯仰角,滚动角)信息,以及对应的三轴加速度信息;以此检测用户的不同运动动作,达到体感控制的目的;
37.控制程序中会储存尾巴完成不同动作所需要舵机旋转角度的角度信息。程序运行过程中会接受六轴运动传感器返回的姿态角度信息,通过与上一周期记录的姿态角度信息对比,获得姿态角度信息的差值。当姿态角度信息差值大于预设的阈值时,判定为触发运动动作(例如扭腰,跳起,鞠躬等)。触发后,控制板107向舵机发送事先储存好的角度信息,驱动舵机执行尾巴摆动的动作。当一段时间未触发任何运动动作时,控制板107发送闲置状态的角度信息,驱动尾巴执行闲置动作。
38.其次是电机仓单元2部分是由电机仓前盖201、第一电机202、第二电机203、电机固定座204、第一线绳绞盘205、第二线绳绞盘206、电机仓后盖207、快速电源插头208和电机仓外壳209组成。其中电机仓前盖201和电机仓后盖207分别连接在电机固定座204前端和后端,第一电机202、第二电机203固定在电机固定座204上,第一线绳绞盘205、第二线绳绞盘206再分别固定在第一电机202和第二电机203的转轴上,由此完成电机仓单元的设置。
39.接下来是虎克铰连续体单元3是由多个单体虎克铰模块304构成;
40.单体虎克铰模块304是由十字铰链301、第一铰链座302、第二铰链座303构成,再由单体虎克铰模块304和弹性棒305进行多端体组合构成虎克铰连续体单元3;其中十字铰链301、第一铰链座302、第二铰链座303串联拼接成单体虎克铰模块304,再取四个单体虎克铰模块304再串联拼接成虎克铰连续体单元3。
41.接下来是转接头4:转接头4的作用是连接虎克铰连续体单元3和球铰连续体单元5,其机构上兼容两种虎克铰连续体单元3和球铰连续体单元5的接口。
42.接下来是球铰连续体单元5是由软胶棒501和多个单体球铰502串联而成。其中软胶棒501由3d打印技术与单体球铰502配做而成,单体球铰502是由3d打印技术一体打印成型,由软胶棒501和单体球铰502拼接形成。
43.接下来是绳张紧装置6由张紧滑块601、张紧座602和张紧螺丝603组合而成。其中张紧滑块601与张紧螺丝603串联安装在张紧座602座上。
44.工作原理:按照顺序将控制箱单元1、电机仓单元2、虎克铰连续体单元3、转接头4、球铰连续体单元5和绳张紧装置6拼接组成连续体仿生机械尾巴,其中由第一电机202和第二电机203直接驱动第一线绳绞盘205、第二线绳绞盘206直接控线绳驱动,线绳通过电机仓后盖207中穿线绳结构后线绳穿过虎克铰连续体单元3中的单体虎克铰模块304侧孔,之后线绳穿过转接头4侧孔,再之后穿过球铰连续体单元5中的单体球铰502,最后线绳汇聚到线绳张紧装置6,控制连续体仿生机械尾巴进行运动;该连续体仿生机械尾巴可以根据六轴运动传感器反馈的信息随身体运动而摆动,增加仿生机械尾巴的趣味性。
45.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
46.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
