1.本实用新型涉及水下机器人领域,更具体的,涉及一种便于多方位观察的水下检测机器人手臂。
背景技术:
2.随着科学技术的发展,人们对水下的认知逐步拓宽,水下机器人也应运而生。水下机器人主要是用于水下环境的探测,在探测的过程中采集各种水下数据,以方便科研人员了解研究水下的各种情况。但是现有的机械臂功能单一,仅仅具有抓取样品的功能,同时在抓取样品时由安装在远端水下机器人机身的摄像机来进行位置观察,极大地影响观察的准确性,导致抓取时不能快速准确地抓到样品。
技术实现要素:
3.为了克服现有技术机械臂功能单一的缺陷,本实用新型所要解决的技术问题在于提出一种便于多方位观察的水下检测机器人手臂,其自身具有视频观察的功能,并且可以灵活调整位置,方便抓取样品。
4.为达此目的,本实用新型采用以下技术方案:
5.本实用新型提供了一种便于多方位观察的水下检测机器人手臂,包括底座、基座、伸缩臂、功能臂、夹持部件以及观察部件。所述基座转动连接于所述底座上,所述伸缩臂的固定端铰接于所述基座上,所述功能臂的一端铰接于所述伸缩臂的自由端,所述功能臂的另一端嵌有电机,所述功能臂的顶部开设有第一凹槽,所述功能臂的底壁开设有第二凹槽,所述夹持部件包括连接块、上夹持爪、下夹持爪、第一电磁铁以及第二电磁铁;所述上夹持爪、所述下夹持爪均铰接于所述连接块的一侧,所述连接块的另一侧与所述电机的动力输出轴固定连接,所述第一电磁铁固定于所述上夹持爪的内侧,所述第二电磁铁固定于所述下夹持爪的内侧。所述观察部件包括第一伸缩杆、第二伸缩杆、水下摄像机以及补光灯,所述第一伸缩杆的固定端铰接于所述第一凹槽的端部,所述水下摄像机铰接于所述第一伸缩杆的自由端,所述第二伸缩杆的固定端铰接于所述第二凹槽的端部,所述补光灯铰接于所述第二伸缩杆的自由端。
6.在本实用新型较佳的技术方案中,所述上夹持爪的末端、所述下夹持爪的末端均设置为锥形结构。
7.在本实用新型较佳的技术方案中,所述上夹持爪的内侧设置有第一柔性夹持件,所述下夹持爪的内侧设置有第二柔性夹持件,所述第一柔性夹持件包括压力传感器与第一橡胶板,所述压力传感器固定于所述上夹持爪的内侧,所述第一橡胶板固定于所述压力传感器上,所述第二柔性夹持件包括第二橡胶板以及海绵块,所述海绵块固定于所述下夹持爪的内侧,所述第二橡胶板固定于所述海绵块上。
8.在本实用新型较佳的技术方案中,所述底座内设置有水下通讯模块,所述水下通讯模块与所述水下摄像机电连接。
9.在本实用新型较佳的技术方案中,所述水下摄像机的一侧还固定有红外线测距仪。
10.在本实用新型较佳的技术方案中,所述便于多方位观察的水下检测机器人手臂还包括信号发射部件,所述信号发射部件包括浮标、信号发射针、信号线以及转轮,所述底座的一侧开设有缺口,所述转轮转动连接于所述缺口内,所述信号线绕设于所述转轮上,所述信号线的一端与所述水下通讯模块电连接,所述信号线的另一端与所述信号发射针电连接,所述信号发射针固定于所述浮标上。
11.本实用新型的有益效果为:
12.本实用新型提供的一种便于多方位观察的水下检测机器人手臂,通过设置的机座、伸缩臂、功能臂以及夹持部,可以实现多位置的调节,使手臂可以实现多方位的调节。同时在功能臂上设置有水下摄像机以及补光灯,通过水下摄像机可以拍摄水下的图像,并且水下摄像机跟随功能臂移动,可以实现多方位的观察,有利于收集详细的水下信息。此外电机配合两个夹持爪,可以将一些坚硬的样品击碎,方便收集,提高机器人手臂功能的多样性。
附图说明
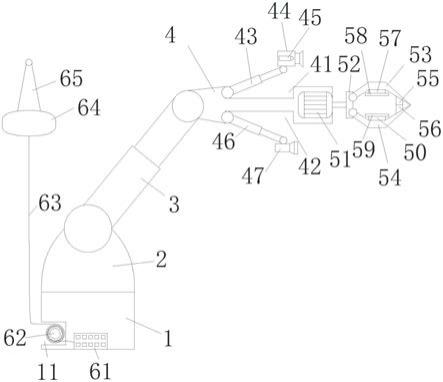
13.图1是本实用新型具体实施方式提供的一种便于多方位观察的水下检测机器人手臂的结构示意图。
14.图中:
[0015]1‑
底座,11
‑
缺口,2
‑
基座,3
‑
伸缩臂,4
‑
功能臂,41
‑
第一凹槽,42
‑
第二凹槽,43
‑
第一伸缩杆,44
‑
水下摄像机,45
‑
红外线测距仪,46
‑
第二伸缩杆, 47
‑
补光灯,51
‑
电机,52
‑
连接块,53
‑
上夹持爪,54
‑
下夹持爪,55
‑
第一电磁铁,56
‑
第二电磁铁,57
‑
压力传感器,58
‑
第一橡胶板,59
‑
第二橡胶板,50
‑
海绵块,61
‑
水下通讯模块,62
‑
转轮,63
‑
信号线,64
‑
浮标,65
‑
信号发射针。
具体实施方式
[0016]
下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
[0017]
如图1所示,实施例中提供了一种便于多方位观察的水下检测机器人手臂,包括底座1、基座2、伸缩臂3、功能臂4、夹持部件以及观察部件。基座2转动连接于底座1上,伸缩臂3的固定端铰接于基座2上,功能臂4的一端铰接于伸缩臂3的自由端,功能臂4的另一端嵌有电机51,功能臂4的顶部开设有第一凹槽41,功能臂4的底壁开设有第二凹槽42,夹持部件包括连接块52、上夹持爪53、下夹持爪54、第一电磁铁55以及第二电磁铁56;上夹持爪53、下夹持爪54均铰接于连接块52的的一侧,连接块52的另一侧与电机51的动力输出轴固定连接,第一电磁铁55固定于上夹持爪53的内侧,第二电磁铁56固定于下夹持爪54的内侧。观察部件包括第一伸缩杆43、第二伸缩杆46、水下摄像机44以及补光灯47,第一伸缩杆43的固定端铰接于第一凹槽41的端部,水下摄像机44铰接于第一伸缩杆43的自由端,第二伸缩杆46的固定端铰接于第二凹槽42的端部,补光灯47铰接于第二伸缩杆46的自由端。
[0018]
手臂通过底座1安装到现有的水下机器人或水下机器人设备搭载平台上。基座2可以沿着底座1旋转,实现夹持部件旋转。通过伸缩臂3可以将夹持部件伸长或缩短一定距离,
方便抓取。在不需要补光以及视频拍摄时,第一伸缩杆43缩回,第一伸缩杆43与水下摄像机44收纳在第一凹槽41内,同样地第二伸缩杆46与补光灯47收纳在第二凹槽42内。在需要进行视频拍摄是,第一伸缩杆43旋转以及伸长,水下摄像机44从第一凹槽41内伸出,拍摄水下的情况。同样地补光灯47也从第二凹槽42内伸出,为水下摄像机44提供补光。在正常夹持物料时,上夹持爪53与下下夹持爪54配合将物料样品夹起。其中第一电磁铁55与第二电磁铁56外均包裹有绝缘套。在抓取一些金属物料时,两个电磁铁通电,对物料进行吸附,提高抓取的成功率。在遇到一些贴附在河床或石头上的物料时,不便直接抓起。此时上夹持爪53与下夹持爪54闭合,组成一个锥形。两个电磁铁中的一个通电,将另一个吸附住。电机51启动,带动上夹持爪53与下夹持爪54所组成的锥形对物料进行钻取,使其破碎,等到物料破碎后,即可以进行抓取。在抓取物料时,水下摄像机44由于比较靠近夹持部件,可以为水上的控制人员提供良好的视野进行操作,提高抓取的效率。
[0019]
具体地,上夹持爪53的末端、下夹持爪54的末端均设置为锥形结构。设置为锥形结构,有利于在钻取物料时具有更强的冲击力,物料更容易破碎。
[0020]
具体地,上夹持爪53的内侧设置有第一柔性夹持件,下夹持爪54的内侧设置有第二柔性夹持件,第一柔性夹持件包括压力传感器57与第一橡胶板58,压力传感器57固定于上夹持爪53的内侧,第一橡胶板58固定于压力传感器57 上,第二柔性夹持件包括第二橡胶板59以及海绵块50,海绵块50固定于下夹持爪54的内侧,第二橡胶板59固定于海绵块50上。压力传感器57可以检测到夹持到物料上的压力大小,当压力过大时,可以调整上夹持爪53与下夹持爪 54之间抓合的力度,避免损坏物料。同时设置的第一橡胶板58与第二橡胶板 59也会物料样品提供缓冲,避免与上夹持爪53或下夹持爪54刚性接触。
[0021]
具体地,底座1内设置有水下通讯模块61,水下通讯模块61与水下摄像机 44电连接。水下通讯模块61为水下信号发射器,将水下摄像机44收集到的视频信息整理成电信号进行发射,水下通讯模块61可以为5g、4g或gprs等通讯芯片。
[0022]
具体地,便于多方位观察的水下检测机器人手臂还包括信号发射部件,信号发射部件包括浮标64、信号发射针65、信号线63以及转轮62,底座1的一侧开设有缺口11,转轮62转动连接于缺口11内,信号线63绕设于转轮62上,信号线63的一端与水下通讯模块61电连接,信号线63的另一端与信号发射针 65电连接,信号发射针65固定于浮标64上。浮标64浮在水面上,水下通讯模块61将通讯信号通过信号线63传到信号发射针65上传输出去,在水面上进行信息传输,提高通讯的可靠性。
[0023]
具体地,水下摄像机44的一侧还固定有红外线测距仪45。红外线测距仪 45可以探测出机器人手臂与目标物体之间的大致距离,有利于遥控人员估算位置进行夹取操作。本实施例中的红外线测距仪45为水下用红外线测距仪45。
[0024]
本实施例的其他技术采用现有技术
[0025]
本实用新型是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本技术的权利要求内的实施例都属于本实用新型保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。