技术特征:
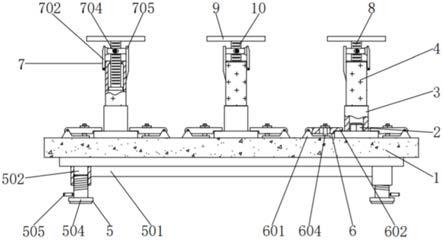
1.一种便于多方位观察的水下检测机器人手臂,其特征在于:包括底座(1)、基座(2)、伸缩臂(3)、功能臂(4)、夹持部件以及观察部件;基座(2)转动连接于底座(1)上,伸缩臂(3)的固定端铰接于基座(2)上,功能臂(4)的一端铰接于伸缩臂(3)的自由端,功能臂(4)的另一端嵌有电机(51),功能臂(4)的顶部开设有第一凹槽(41),功能臂(4)的底壁开设有第二凹槽(42),夹持部件包括连接块(52)、上夹持爪(53)、下夹持爪(54)、第一电磁铁(55)以及第二电磁铁(56);上夹持爪(53)和下夹持爪(54)均铰接于连接块(52)的一侧,连接块(52)的另一侧与电机(51)的动力输出轴固定连接,第一电磁铁(55)固定于上夹持爪(53)的内侧,第二电磁铁(56)固定于下夹持爪(54)的内侧;观察部件包括第一伸缩杆(43)、第二伸缩杆(46)、水下摄像机(44)以及补光灯(47),第一伸缩杆(43)的固定端铰接于第一凹槽(41)的端部,水下摄像机(44)铰接于第一伸缩杆(43)的自由端,第二伸缩杆(46)的固定端铰接于第二凹槽(42)的端部,补光灯(47)铰接于第二伸缩杆(46)的自由端。2.根据权利要求1所述的一种便于多方位观察的水下检测机器人手臂,其特征在于:所述上夹持爪(53)的末端和所述下夹持爪(54)的末端均设置为锥形结构。3.根据权利要求1所述的一种便于多方位观察的水下检测机器人手臂,其特征在于:所述上夹持爪(53)的内侧设置有第一柔性夹持件,所述下夹持爪(54) 的内侧设置有第二柔性夹持件,所述第一柔性夹持件包括压力传感器(57)与第一橡胶板(58),所述压力传感器(57)固定于所述上夹持爪(53)的内侧,所述第一橡胶板(58)固定于所述压力传感器(57)上,所述第二柔性夹持件包括第二橡胶板(59)以及海绵块(50),所述海绵块(50)固定于所述下夹持爪(54)的内侧,所述第二橡胶板(59)固定于所述海绵块(50)上。4.根据权利要求1所述的一种便于多方位观察的水下检测机器人手臂,其特征在于:所述底座(1)内设置有水下通讯模块(61),所述水下通讯模块(61)与所述水下摄像机(44)电连接。5.根据权利要求4所述的一种便于多方位观察的水下检测机器人手臂,其特征在于:还包括信号发射部件,所述信号发射部件包括浮标(64)、信号发射针(65)、信号线(63)以及转轮(62),所述底座(1)的一侧开设有缺口(11),所述转轮(62)转动连接于所述缺口(11)内,所述信号线(63)绕设于所述转轮(62)上,所述信号线(63)的一端与所述水下通讯模块(61)电连接,所述信号线(63)的另一端与所述信号发射针(65)电连接,所述信号发射针(65)固定于所述浮标(64)上。6.根据权利要求1所述的一种便于多方位观察的水下检测机器人手臂,其特征在于:所述水下摄像机(44)的一侧还固定有红外线测距仪(45)。
技术总结
本实用新型公开了一种便于多方位观察的水下检测机器人手臂,包括底座、基座、伸缩臂、功能臂、夹持部件以及观察部件。所述夹持部件包括连接块、上夹持爪、下夹持爪、第一电磁铁以及第二电磁铁,所述观察部件包括第一伸缩杆、第二伸缩杆、水下摄像机以及补光灯。通过设置的机座、伸缩臂、功能臂以及夹持部,可以实现多位置的调节,使手臂可以实现多方位的调节。同时在功能臂上设置有水下摄像机以及补光灯,通过水下摄像机可以拍摄水下的图像,并且水下摄像机能够跟随功能臂移动,可以实现多方位的观察,有利于收集详细的水下信息。此外电机配合两个夹持爪,方便收集水下杨平,提高机器人手臂功能的多样性。臂功能的多样性。臂功能的多样性。
技术研发人员:刘爱荣 胡晓勇 杨智诚 傅继阳 陈炳聪 袁向荣 汪大洋 朱立学 杨子遨
受保护的技术使用者:广州大学
技术研发日:2021.01.29
技术公布日:2021/10/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。