手动工具、动力工具和快速设置紧固件
1.相关专利申请的交叉引用
2.本技术要求于2017年11月10日提交的美国临时申请no.62/584,382、于2017年11月13日提交的美国临时申请no.62/585,369以及于2017年 11月13日提交的美国临时申请no.62/585,507的权益和优先权,上述申请的全部内容通过参引并入本文。
技术领域
3.本发明创造总体上涉及手动工具和紧固件的领域。本发明创造具体地涉及用于提高手动工具的旋转速度的方法和机构。描述了用于使紧固件绕螺纹轴快速旋转的工具和装置。
背景技术:
4.us2013239755a1公开了一种螺母驱动器,该螺母驱动器包括构造成接纳并接合六角螺母以使六角螺母相对于螺纹杆旋转的座。座包括座开口。螺母驱动器还包括:长柄,该长柄包括第一端部、第二端部以及延伸穿过长柄的第一端部和第二端部的长柄孔口。螺母驱动器还包括手柄,该手柄包括前端部、后端部和延伸穿过手柄的前端部和后端部的手柄孔口,并且长柄的第二端部联接至手柄以用于共同旋转。座开口、长柄孔口和手柄孔口对准并连通,以允许螺纹杆在座使六角螺母旋转的同时延伸穿过座开口、长柄孔口、手柄孔口并超出手柄的后端部。
5.us2017259410a1公开了一种手动工具,该手动工具包括:壳体,该壳体限定接纳空间;轴,该轴以可旋转的方式延伸穿过接纳空间并且具有从壳体暴露的相对的端部;环形飞轮,该环形飞轮以可旋转的方式布置在该接纳空间中并围绕该轴;以及增速齿轮机构。齿轮机构包括:启动齿轮,该启动齿轮以可以共同旋转的方式联接至轴并布置在接纳空间中;至少一个传动齿轮,该至少一个传动齿轮以可旋转的方式布置在接纳空间中并与启动齿轮啮合;以及最终齿轮,该最终齿轮以可以共同旋转的方式联接至飞轮、布置在接纳空间中并与传动齿轮啮合。最终齿轮的转速大于启动齿轮的转速。
6.尽管现有技术中已经公开了用于对紧固件进行紧固的各种工具,但是这些工具的旋转速度较低并且这些工具的旋转的持续时间较短。因此,期望对现有技术中的工具进行改进。
7.本发明创造的目的是提供提高手动工具/动力工具的旋转速度的方法和机构,该手动工具和/或动力工具可以更快地将紧固件(例如,螺母) 附接至螺纹轴。
技术实现要素:
8.本发明创造的一个实施方式涉及一种手动工具。该手动工具包括形成外部抓握件的壳体和穿过壳体并限定通道的带花键的座,该通道至少部分地延伸穿过壳体。能够旋转的致动器在旋转力施加至外部抓握件时使壳体内的带花键的座旋转。传动装置将能够旋转的致动器与带花键的座相互连接。传动装置在壳体旋转时相对于外部抓握件的旋转速度增
大或减小带花键的座的旋转速度。带花键的座相对于外部抓握件的旋转速度随着外部抓握件的旋转而增大或减小。
9.本发明创造的另一实施方式涉及一种手动工具。该手动工具包括形成外部抓握件的外部壳体和联接至壳体的带花键的座。带花键的座穿过壳体并且限定穿过壳体的通道。触发器致动器可以联接至带花键的座。传动装置将触发器致动器与带花键的座相互连接。传动装置相对于由触发器致动器所产生的旋转速度增大或减小带花键的座的旋转速度。触发器致动器的运动引起带花键的座的旋转。将触发器致动器与带花键的座相互连接的传动装置相对于触发器致动器的运动增大或减小带花键的座的旋转速度。
10.本发明创造的另一实施方式涉及一种动力工具。该动力工具包括限定手柄的壳体和联接至壳体的带花键的座。带花键的座穿过壳体并且限定穿过壳体的通道。带花键的座包括空隙,以将紧固件接纳在螺纹轴上。马达可以联接至带花键的座并且使带花键的座在壳体内旋转。马达为带花键的座提供旋转的速度。传动装置可以将带花键的座与马达相互连接。传动装置具有相对于马达的速度增大或减小带花键的座的旋转速度的齿轮比。传动装置包括联接至带花键的座的从动齿轮。动力工具具有穿过从动齿轮和壳体的槽。槽具有大于带花键的座的直径的宽度,并且槽构造成有助于互换带花键的座。壳体和从动齿轮中的槽与带花键的座中的空隙对准,以将紧固件接纳在带花键的座内的螺纹轴上。
11.本发明创造的另一实施方式涉及一种快速设置紧固件。快速设置紧固件包括沿着螺母的周缘的驱动表面。驱动表面构造成接纳工具以使螺母沿着螺母的第一轴线绕螺纹轴旋转。快速设置紧固件包括沿着螺母的第一轴线延伸穿过螺母的螺纹孔。螺纹孔构造成联接至螺纹轴,该螺纹轴沿着螺母的第一轴线穿过螺纹孔。光滑孔沿着螺母的第二轴线延伸穿过螺母。光滑孔与螺母的第一轴线以锐角相交。光滑孔具有构造成接纳螺纹轴的外直径的直径,其中,螺纹轴能够自由地滑动穿过光滑孔。快速设置紧固件包括沿着螺母的周缘并且在第二轴线的方向上穿过一个或更多个驱动表面的开口。开口构造成接纳螺纹轴,螺纹轴通过开口插入螺母中并且螺纹轴沿着螺母的第二轴线滑动。当螺母就位时,螺母相对于第一轴线旋转并且沿着螺纹孔被紧固。
12.替代性示例性实施方式涉及如可以在本技术的各方面中总体上阐述的其他特征和特征的组合。
附图说明
13.通过以下结合附图的详细描述将更充分地理解本技术,其中,相同的附图标记指代相同的元件,在附图中:
14.图1是根据示例性实施方式的紧固件驱动手动工具的立体图。
15.图2是根据示例性实施方式的图1的工具的横截面图。
16.图3是根据示例性实施方式的被用来使紧固件或螺母沿着螺纹轴旋转的图1的工具的横截面图。
17.图4是图示根据示例性实施方式的图1的工具的驱动机构的放大的横截面图。
18.图5是根据示例性实施方式的图1的工具的分解图。
19.图6是根据本发明创造的另一实施方式的紧固件驱动手动工具的立体图。
20.图7是根据示例性实施方式的图6的紧固件驱动手动工具的立体图。
21.图8是根据示例性实施方式的电动紧固件驱动工具的立体图。
22.图9是根据示例性实施方式的图8的电动紧固件驱动工具的立体图。
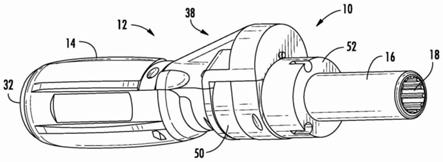
23.图10是根据示例性实施方式的能够附接至动力工具的可延伸的动力工具适配器的立体图。
24.图11是根据示例性实施方式的图10的动力工具适配器的一部分的详细横截面图,其包括对螺母进行支承的截头圆锥体的详细视图。
25.图12是根据示例性实施方式的快速设置紧固件的立体图。
26.图13图示了根据示例性实施方式的处于滑动调节位置或成角度位置以用于附接至螺纹轴的图12的紧固件。
27.图14图示了根据示例性实施方式的处于与螺纹轴螺纹接合的螺纹调节位置或对准位置的图12的紧固件。
28.图15图示了根据示例性实施方式的快速设置紧固件的另一实施方式。
29.图16是根据示例性实施方式的图15的紧固件的横截面图。
30.图17图示了根据示例性实施方式的处于滑动调节位置或成角度位置的图15的紧固件。
31.图18图示了根据示例性实施方式的处于与螺纹轴螺纹接合的螺纹调节位置或对准位置的图15的紧固件。
32.图19是根据示例性实施方式的紧固件驱动工具的立体图。
33.图20是根据示例性实施方式的测量工具的侧视图。
34.图21是图20的测量工具的一部分的横截面图。
具体实施方式
35.附图总体上图示了用于将紧固件紧固至螺纹轴的手动工具的各种实施方式。手动工具可以用于将紧固件附接至杆、用于钻孔以及/或者用于将螺纹轴或轴旋拧到带螺纹或不带螺纹的开口中。在一些实施方式中,旋转的速度从输入旋转(例如,手动工具的手柄的旋转)增大至联接至紧固件的带花键的链轮的输出旋转。通过手动工具旋转的转变(例如齿轮比) 来提高旋转速度。手动工具可以包括带花键的座,该带花键的座通过用以增大带花键的座处的旋转速度的一个或更多个齿轮联接至致动器。轴承和飞轮提高了带花键的座的角动量,以便即使在手动工具已完成旋转后也可以继续旋转。以这种方式,手动工具通过保持带花键的座处的角动量增大了手动工具的输入旋转速度和旋转的持续时间。
36.手动工具可以包括将致动转换为角速度和旋转的可旋转的致动器或线性致动器。例如,手动工具的旋转可以引起可旋转的致动器使带花键的座在手动工具上的旋转增大和/或保持。替代性地,杆或触发器可以产生线性运动,该线性运动通过线性致动器的凸轮(或传动装置)机构转换为旋转,该线性致动器增大了带花键的座处的旋转的速度和持续时间。飞轮和齿轮比可以增大带花键的座处的输出旋转速度和旋转持续时间。动力工具接纳件38可以用于增大例如来自电钻的旋转的速度。动力工具接纳件 38使得能够使用手动工具外部的马达来驱动带花键的座。在一些实施方式中,马达直接接纳在手动工具内,以向带花键的座提供连续旋转。手动工具内的马达可以增大带花键的座的旋转速度并提供带花键的座的连续旋转。
37.申请人已经发现,通过保持旋转惯性并增大带花键的座处的旋转的速度,手动工具和/或动力工具可以更快地将紧固件(例如,螺母)附接至螺纹轴。允许螺纹轴穿过工具的中心孔实现了快速操作,而无需在每次旋转后重新定位带花键的座。传动装置增大了带花键的座的齿轮比和速度。飞轮保持旋转惯性,以增大带花键的座旋转的持续时间。传动装置和飞轮一起减小了使紧固件沿着螺纹轴行进的时间。
38.紧固件也可以设计成允许在螺纹轴上快速定位。在一些实施方式中,紧固件可以具有穿过用于使紧固件旋转的驱动表面的开口。这种构型允许使用者将紧固件靠近螺纹旋转所需位置直接安置在螺纹轴上。在其他实施方式中,紧固件在驱动表面中没有开口,但是具有穿过螺母的两个直径。紧固件可以具有两个位置,即沿着螺纹轴的滑动调节位置和螺纹调节位置。紧固件可以在滑动调节位置中沿着螺纹轴滑动并且旋转到螺纹调节位置中以与螺纹轴螺纹接合。在滑动调节位置中,由于穿过紧固件的孔大于螺纹轴的外直径,因此紧固件可以沿着螺纹轴以可滑动的方式移动。紧固件可以例如旋转5度至30度进入螺纹调节位置中。在螺纹调节位置中,紧固件与螺纹轴螺纹接合,并且紧固件绕轴旋转以将紧固件锁定就位。申请人已经发现,这些紧固件类型使得能够将处于滑动位置的紧固件快速安置至沿着螺纹轴的大致位置。然后,紧固件可以被旋转到螺纹位置中,以与紧固件螺纹接合并紧固紧固件(例如,抵靠相邻表面)。
39.图1至图5图示了根据本发明创造的实施方式的紧固件驱动工具或手动工具10。图示的手动工具10包括壳体12、手柄或外部抓握件14、联接至外部抓握件14的驱动构件16以及带花键的座18。手动工具10包括驱动机构20(图2),该驱动机构20用于使驱动构件16和带花键的座18 相对于外部抓握件14绕纵向旋转轴线22旋转。驱动机构20包括致动器 50、固定至驱动构件16并联接至带花键的座18的飞轮52、以及将致动器50与驱动构件16相互连接的传动装置54。在图示的实施方式中,驱动构件16包括带花键的座18,该带花键的座18位于驱动构件16的与外部抓握件14相反的端部处。驱动构件16或带花键的座18可以包括不同形状的座(例如,六边形、正方形、矩形等),或者驱动构件16可以包括其他紧固件驱动特征件,比如螺丝刀刀头或钻头。例如,六边形带花键的座18可以联接至六角形形状的螺丝刀刀头。图示的外部抓握件14是具有大致筒形的外部抓握件14的桶型手柄,该桶型手柄可以例如由弹性体材料形成。
40.壳体12绕紧固件驱动工具形成外部抓握件14。外部抓握件14可以具有圆形的横截面形状或其他形状。例如,外部抓握件14可以具有矩形、六边形或八边形的横截面形状。壳体12和包括带花键的座18的驱动构件 16包括沿着带花键的座18的旋转轴线22延伸的相应的孔24和26。壳体的孔24和驱动构件的孔26对准并且限定沿着纵向旋转轴线22延伸穿过手动工具10的连续通道28。例如,带花键的座18穿过壳体12并且限定至少部分地延伸穿过壳体12的通道28。在其他实施方式中,通道28是连续的并且一直穿过壳体12。带花键的座18可以联接至壳体12并且/或者穿过壳体12以限定穿过壳体12的连续通道28。
41.在一些实施方式中,衬套管30从外部抓握件14的后端部32延伸至驱动构件16的邻近带花键的座18的内部肩部34。连续通道28延伸穿过衬套管30的整个长度。连续通道28构造成当手动工具10用于沿着轴40 (图3)驱动紧固件(例如,螺母42)时接纳一定长度的螺纹轴或轴40。换句话说,螺纹轴40可以穿过驱动构件16的带花键的座18和外部抓握件14,以允许手动工具10沿着螺纹轴40的任何长度驱动螺母42。
42.参照图4和图5,壳体12由三个组成部分组成:驱动壳体44、致动器壳体46和手柄壳体48。驱动壳体44封围驱动机构20的至少一部分。驱动壳体44包括第一部分和第二部分,第一部分在外部抓握件14的凹入区域处联接至手柄壳体48,并且第二部分联接至致动器壳体46。手柄壳体48形成外部抓握件14。
43.驱动构件16可以联接至带花键的座18以驱动带花键的座处的紧固件。驱动构件16可以固定地联接至带花键的座18或者可以通过传动装置 54或其他相互连接的部分联接。驱动构件16可以是带花键的座18或与带花键的座18成一体,使得驱动构件16和带花键的座18形成单个连续部分。在一些实施方式中,驱动构件16附接至传动装置54,并且在其他实施方式中,驱动构件16是传动装置54的一部分,该传动装置54驱动带花键的座18的旋转。
44.带花键的座18由可旋转的致动器50驱动。致动器50的运动由传动装置54转变并传递至带花键的座18。带花键的座18可以是构造成接纳六角螺母的六边形形状。带花键的座18可以包括从限定通道28的表面向内延伸的肩部34。通道28在肩部34处的宽度小于通道28的开口端部处的宽度。以这种方式,肩部34将六角螺母定向在带花键的座18内并防止六角螺母穿过带花键的座18。
45.带花键的座18可以具有其他形状(例如,圆形、正方形、矩形、五边形、六边形或八边形)。带花键的座18可以沿通道28穿过壳体12并形成穿过壳体12的中心纵向轴线或可旋转轴线22的开口。例如,带花键的座18穿过壳体12的中心。带花键的座18可以具有不同的直径。例如,带花键的座18包括穿过带花键的座的限定内部肩部34的部分的较小直径。肩部34可以定形状成一致地将螺母同中心地定位在带花键的座18的通道28内。
46.在一些实施方式中,带花键的座18的外直径可以在带花键的座18被约束以抵抗在壳体12的外部抓握件处所施加的旋转时增大或减小。带花键的座18的外直径可以减小(例如,以将钻头夹持在带花键的座18内)。当带花键的座18被约束并且壳体12的外部抓握件沿第一方向旋转时,带花键的座18的外直径减小。带花键的座18的外直径可以扩大(例如,以将带花键的座18内的所夹持的钻头移除)。当带花键的座18被约束并且外部抓握件沿与第一方向相反的第二方向旋转时,带花键的座的外直径扩大。
47.在一些实施方式中,可旋转的致动器50在旋转力施加至外部抓握件 14时使带花键的座18在壳体12内旋转。例如,致动器50是可以由手动工具10的使用者旋转以(经由传动装置54)使驱动构件16旋转的轮。在其他实施方式中,如图6至图7中所示,线性致动器或触发器致动器 150联接至带花键的座118,并且线性致动器或触发器致动器150可以包括枢转杆和/或触发器运动转换机构,以将杆的运动转换为驱动构件116 的旋转。在一些实施方式中,致动器50或150可以包括用于连接至旋转动力工具的接口。飞轮52或152可以增大驱动构件16或116的质量以增大旋转惯性。飞轮52或152可以与驱动构件16或116一体地形成为单个件;然而,替代性地,飞轮52或152可以单独地形成并且联接成以任何合适的方式与驱动构件16或116共同旋转。飞轮52或152可以联接至带花键的座18或118,以在带花键的座18或118上增加周向质量,以便在旋转力施加至壳体12或112的外部抓握件14或114时保持旋转惯性。在一些实施方式中,电动马达联接至传动装置54或154、可旋转的致动器 50和/或触发器致动器150,以使带花键的座18或118旋转。
48.返回图1至图5,手动工具10包括一组齿轮或传动装置54。传动装置54将可旋转的致动器50(或图6的触发器致动器150)与带花键的座 18相互连接。传动装置54在壳体12旋
转(或启用触发器)时相对于外部抓握件的旋转速度增大带花键的座18的旋转速度。类似地,传动装置 54可以相对于由触发器致动器150所产生的旋转速度增大带花键的座18 的旋转速度。在一些实施方式中,手动工具10可以包括可以连接至传动装置54的动力工具接纳件38。动力工具接纳件38将动力工具附接至传动装置54或致动器50以使带花键的座18旋转。
49.传动装置54包括驱动齿轮56、惰齿轮58和从动齿轮60。驱动齿轮 56联接成与致动器50共同旋转,并且驱动齿轮56包括与惰齿轮58上的第一组齿轮齿64啮合的一组齿轮齿62。惰齿轮58上的第二组齿轮齿66 与从动齿轮60上的齿轮齿68啮合。在一些实施方式中,驱动齿轮56、惰齿轮58和从动齿轮60将施加至手动工具的扭矩转换为增大的带花键的座18的旋转速度。在其他实施方式中,外部抓握件14处的旋转的速度被转换为带花键的座18处的增大的扭矩。在一些实施方式中,操作者可以选择传动装置54的齿轮比。在该实施方式中,使用者可以选择相对于手动工具10的外部抓握件14的旋转,手动工具10在带花键的座18处是递送增大的扭矩还是递送增大的速度。
50.驱动齿轮56由第一轴承70和第二轴承72(图4)以可旋转的方式支承在衬套管30上。在图示的实施方式中,第一轴承70是滚珠轴承,并且第二轴承72是滚针轴承;但是,可以使用其他类型的轴承。惰齿轮58在驱动壳体44内由第三轴承74和第四轴承76以可旋转的方式支承在轴78 上。在图示的实施方式中,第三轴承74和第四轴承76是滚珠轴承;但是可以使用其他类型的轴承。
51.惰齿轮58包括第二组齿轮齿66,所述第二组齿轮齿66相对于第一组齿轮齿64偏移并与从动齿轮60上的一组齿轮齿104啮合。从动齿轮 60包括相对于一组从动齿68偏移的凸缘80(图5)。图示的凸缘80包括多个径向向外延伸的凸角82,所述凸角82接纳在飞轮52中的对应的轴向凹部84中。
52.在一些实施方式中,传动装置54是可调节的。可调节的传动装置54 提供不同的齿轮比。传动装置54提供第一齿轮比(例如,1:2)和第二齿轮比(例如,1:3),该第一齿轮比使带花键的座18相对于外部抓握件处的旋转以第一速度旋转,该第二齿轮比使带花键的座相对于外部抓握件处的旋转以第二速度旋转。第一旋转速度可以小于第二旋转速度。使用者可以从第一齿轮比切换至第二齿轮比。在一些实施方式中,使用者可使用另外的齿轮比,比如第三齿轮比(例如,1:4)、第四齿轮比(例如,1: 5)和第六齿轮比(例如,2:1)。
53.紧固件86可以延伸穿过凸角82并延伸到飞轮52中,以将从动齿轮 60固定至飞轮52。飞轮52可以联接至带花键的座18以在带花键的座18 上增加周向质量,并且在旋转力施加至手动工具10的外部抓握件14时保持带花键的座18的旋转惯性。飞轮52可以联接至触发器致动器150的带花键的座118或可旋转的致动器50的带花键的座18。飞轮52由第五轴承 88(例如,滚珠轴承)以可旋转的方式支承在衬套管30上。驱动齿轮56、惰齿轮58和从动齿轮60构造成提供从可旋转的致动器50至驱动构件16 和带花键的座18速度增大。例如,传动装置54可以提供从可旋转的致动器50至驱动构件16的1:2的齿轮比或速度比。如此,驱动构件16对于致动器50的每次旋转使带花键的座18旋转两次。在其他实施方式中,传动装置54可以提供从致动器50至驱动构件16的其他齿轮比。例如,传动装置54可以提供2:1、1:1、1:2、1:3、1:4或1:5的齿轮比。
54.在一些实施方式中,齿轮比可以由手动工具10的使用者调节(例如,通过切换机
构)。使用者可以对于一个操作选择2:1的比并且对于另一操作选择1:4的比。齿轮比确定了针对外部抓握件14的每次旋转的带花键的座处的旋转的速度。例如,2:1的齿轮比将外部抓握件14的两次旋转转变为带花键的座18处的一次旋转。因此,2:1的齿轮比是导致带花键的座18处的较大扭矩的较慢旋转。1:4的齿轮比将外部抓握件14的一次旋转转变为驱动构件16和/或带花键的座18处的四次旋转。因此,1:4的齿轮比加快了带花键的座18处的旋转。在一些实施方式中,使用者可以选择特定应用所需的齿轮比。
55.在操作中,使用者将螺母42定位在带花键的座18中、使螺母42与一定长度的螺纹轴40对准、并且使致动器50旋转(图3)。使致动器50 旋转引起驱动构件16以由致动器50的齿轮比所确定的速度(例如,旋转的致动器的速度的二分之一、两倍或三倍)旋转,由此使螺母42沿着螺纹轴40快速前进。飞轮52增大了驱动构件16的旋转惯性,使得驱动构件16和飞轮52可以在没有使用者对致动器50的连续输入的情况下继续旋转。换句话说,使用者可以将力渐进地施加至致动器50,以使带花键的座18和飞轮52连续旋转。带花键的座18的长度优选地比螺母42的厚度大,使得螺母42在带花键的座18内的轴向位置可以随着使用者使螺母 42沿着螺纹轴40前进而变化。当螺母42前进时,螺纹轴40可以经由连续通道28穿过手动工具10。
56.图6和图7图示了手动工具110的另一实施方式。手动工具110在图 6和图7中图示并且与图1至图5中图示的手动工具10基本相同或相似。除了下面描述的差异之外,手动工具110具有手动工具10的所有特征和功能。与上述手动工具10相比,手动工具110包括触发器致动器150、比如线性致动器(例如,触发器或杆)。手动工具110的偶数特征和元件与手动工具10的相似特征和元件相对应。在相似的情况下,手动工具10和手动工具110具有偶数,并且手动工具110被分配相同的附图标记加“100”。手动工具110的不相同的元件被分配奇数。
57.图示的手动工具110包括壳体112、手柄或外部抓握件114、联接至带花键的座118的驱动构件116、外部壳体114以及图7中图示的驱动机构120,该驱动机构120用于使带花键的座118相对于外部抓握件114旋转。驱动机构120包括致动器150、联接至带花键的座118的飞轮152、以及将致动器150与带花键的座118相互连接的齿轮组154。在图示的实施方式中,触发器致动器150是以可枢转的方式联接至外部壳体114的杆或触发器。触发器致动器150可以沿第一方向151(例如,在图示的实施方式中朝向外部抓握件114)枢转以(经由齿轮组154)使带花键的座118 旋转。致动器150通过偏置构件155沿与第一方向151相反的第二方向 153偏置。偏置构件155可以位于触发器致动器105内,以打开触发器致动器150以进行连续致动。触发器致动器150可以在远离外部抓握件的打开位置与邻近外部抓握件114的关闭位置之间移动。偏置构件155将触发器致动器150偏置至远离外部抓握件114的打开位置。在图示的实施方式中,偏置构件155是扭转弹簧;但是,可以使用其他偏置构件(例如,螺旋弹簧、排斥磁体等)。
58.齿轮组154包括驱动齿轮156、惰齿轮158和从动齿轮160(图7)。图示的驱动齿轮156是齿条齿轮,该齿条齿轮具有联接至致动器150的远端部分的第一端部157、突出穿过驱动壳体144中的开口161的第二端部 159(图6)、以及布置在第一端部157与第二端部159之间的一组齿162 (图7)。驱动齿轮156的齿162与惰齿轮158上的第一组齿轮齿164啮合,使得驱动齿轮156沿箭头163的方向的线性运动使惰齿轮158沿箭头 165的方向旋转。惰齿轮158
包括第二组齿轮齿166,所述第二组齿轮齿 166相对于第一组齿轮齿164偏移并与从动齿轮160上的一组从动齿轮齿 168啮合。惰齿轮158还包括单向棘轮169,该单向棘轮169将第一组齿轮齿164联接成与第二组齿轮齿166沿箭头165的方向共同旋转,并且该单向棘轮169允许第二组齿轮齿166相对于第一组齿轮齿164沿箭头167 的方向旋转。
59.凸轮机构171可以联接在触发器致动器150与带花键的座118之间。在图示的实施方式中,凸轮机构171是与圆形惰齿轮(例如,齿轮组154 的一部分)啮合的齿条齿轮。在其他实施方式中,凸轮机构171可以包括将线性致动器输入转变为旋转输出的任何系统。例如,滑块曲柄链或其他四杆机构。凸轮机构171可以具有基础本体(ground body)被固定在比如往复式发动机中的第一变换。凸轮机构171可以具有曲柄被固定在比如惠特沃思(whitworth)快速返回机构中的第二变换。凸轮机构171可以具有连接杆被固定在比如槽式曲柄机构中的第三变换。凸轮机构171可以具有使得滑块被固定在比如钟摆泵中的第四变换。
60.凸轮机构171像转变器一样工作,将触发器致动器150的线性运动转换为带花键的座118处的旋转运动。在一些实施方式中,凸轮机构171可以增大或减小带花键的座118处的旋转的速度。例如,凸轮机构171可以将致动器150与驱动带花键的座118的齿轮组154相互连接。凸轮机构171 将触发器致动器150处的线性运动转换为驱动构件116和带花键的座118 的旋转运动。
61.触发器致动器150可以是以可枢转的方式联接至外部壳体112的杆 (例如,如图6至图7中所示为触发器致动器150)。杆或触发器致动器 150的从远离外部抓握件114的第一位置至邻近外部抓握件114的第二位置的线性运动使联接至带花键的座118的驱动构件116的飞轮152旋转。在操作中,使触发器致动器150沿第一方向151(箭头151)枢转致使驱动齿轮156沿箭头163的方向线性地移动。这引起带花键的座118旋转(例如,沿顺时针方向167),以使螺母沿着螺纹轴或杆快速前进。在一些实施方式中,带花键的座118的旋转的方向可以反向。例如,切换件允许带花键的座118沿箭头165的逆时针方向旋转(例如,以移除螺母)或者沿顺时针方向167旋转(例如,以紧固螺母)。
62.飞轮152增大驱动构件116的旋转惯性,使得带花键的座118可以在不需要使用者对致动器150的连续输入的情况下继续旋转。换句话说,使用者可以连续地一次或多次挤压致动器150来激励飞轮152,并且然后飞轮152和带花键的座118可以连续旋转并沿着螺纹轴驱动螺母。当致动器 150不移动或者沿着第二方向153(箭头153)移动时,棘轮169允许惰齿轮158上的第二组齿166继续沿箭头165的方向旋转。
63.在一些实施方式中,可以颠倒该过程以从螺纹轴移除螺母。例如,切换件可以在被致动器150启用时使带花键的座118的旋转方向反向。使用者可以连续地一次或多次挤压致动器150来激励飞轮152,以使带花键的座118旋转以将螺母沿着螺纹轴收回和移除。类似地,当致动器150不移动或者沿第二方向153移动时,棘轮169允许惰齿轮158上的第二组齿 166继续沿箭头165的方向旋转以移除螺母。
64.图8和图9图示了根据本发明创造的另一实施方式的电动紧固件驱动工具或动力工具200。图示的动力工具200包括具有手柄204的壳体202、从壳体202延伸的带花键的座206以及用于使带花键的座206相对于壳体 202绕纵向轴线或旋转轴线210旋转的驱动机构。尽管在图8中示意性地图示了,但壳体202可以采用多种形状和构型。在一些实施方式
中,手柄 204平行于旋转轴线210延伸,这可以为动力工具200提供紧凑且符合人体工程学的形状因子。
65.带花键的座206包括紧固件接合端部212和从紧固件接合端部212延伸的长形中空管214。带花键的座穿过壳体202并限定穿过动力工具200 的连续通道。带花键的座206包括沿着带花键的座206的中心的旋转轴线 210。带花键的座可以具有槽或空隙216,以将紧固件接纳在螺纹轴上。连续通道或中空管214构造成当动力工具200用于沿着螺纹轴驱动紧固件 (例如,螺母)时接纳一定长度的螺纹轴。换句话说,螺纹轴可以轴向地穿过带花键的座206,以允许动力工具200沿着螺纹轴的任何长度驱动紧固件。
66.带花键的座206还包括沿着带花键的座206的长度延伸到中空管214 中的空隙216。空隙216具有至少略大于螺纹轴的大直径的宽度218,使得螺纹轴可以沿横向于旋转轴线210的方向插入带花键的座206的中空管 214中。因此,带花键的座206可以在沿着螺纹轴的任何点处接合紧固件,而不必使螺纹轴的端部轴向穿过动力工具200。
67.电动马达220联接至带花键的座206,并且电动马达220构造成使带花键的座206在壳体202内旋转。电动马达220使带花键的座206以旋转速度旋转。传动装置242可以相对于电动马达220的输出旋转速度增大带花键的座206的旋转速度。驱动机构208包括安装至支承框架222的电动马达220(例如,有刷直流电动马达或无刷直流电动马达)、小齿轮224、与小齿轮224啮合并由小齿轮224驱动的第一惰齿轮226、以及联接成与第一惰齿轮226共同旋转的第二惰齿轮228。在一些实施方式中,电动马达220位于带花键的座206的一侧并且手柄204围绕电动马达220形成。在一些实施方式中,带花键的座206穿过电动马达220,使得手柄204围绕电动马达220形成。带花键的座206沿着中空管214绕穿过带花键的座 206的中心的旋转轴线210形成通道。
68.传动装置242将带花键的座206与电动马达220相互连接。传动装置 242可以具有相对于电动马达220的速度增大带花键的座206的旋转速度的齿轮比。例如,小齿轮224由电动马达220的输出来驱动,并且小齿轮 224布置在支承框架222的第一侧部上。第二惰齿轮228布置在支承框架 222的与小齿轮224和第一惰齿轮226相反的侧部上,并且第二惰齿轮228 通过中间轴230联接至第一惰齿轮226,该中间轴230延伸穿过支承框架 222。第二惰齿轮228与第一正齿轮232和第二正齿轮234(图9)啮合,所述第一正齿轮232和第二正齿轮234两者均与从动齿轮236啮合,从动齿轮236联接成与带花键的座206共同旋转。驱动机构208可以构造成提供从电动马达220至带花键的座206的速度增大。
69.参照图9,从动齿轮236包括径向向内延伸至从动齿轮236的中心的槽或空隙238。从动齿轮236中的空隙238与带花键的座206中的空隙216 一致。换句话说,当从动齿轮236使带花键的座206旋转时,空隙216和空隙238相对于彼此保持对准。因此,从动齿轮236在其外部齿轮齿中具有空隙238定位的间隙。支承框架222还具有槽240,在图示的实施方式中,槽240的宽度与从动齿轮236中的空隙238的宽度和带花键的座206 中的空隙216的宽度相同。优选地,空隙238的宽度和槽240的宽度至少略大于带花键的座206的中空管214的外直径,使得带花键的座206可以通过从动齿轮236中的空隙238和支承框架222中的槽240从动力工具 200移除。然后,例如可以将带花键的座206与不同尺寸的其他驱动构件互换。正齿轮232和234彼此间隔开一距离,该距离大于空隙238的宽度,使得正齿轮232或234中的至少一者与联接至带花键的座206的从动齿轮 236啮合。当从动齿轮236旋转时,相应的正齿轮
232和234在空隙238 穿过正齿轮232或正齿轮234时与从动齿轮236断开接合。
70.继续参照图9,在操作中,当槽240与空隙216和238对准时,使用者可以将一定长度的螺纹轴插入带花键的座206中,并且将紧固件接合端部212定位在紧固件上。然后,使用者使电动马达220通电(例如,通过推动按钮或拉动触发器),该电动马达220经由驱动机构208使带花键的座206旋转,以使紧固件沿着螺纹轴前进。在一些实施方式中,动力工具 200可以包括传感器(例如,该传感器与从动齿轮236连接),以检测支承框架222中的槽240何时与带花键的座206中的空隙216对准,从而当使用者停止紧固件驱动操作时,空隙216和238与槽240自动对准,并且动力工具200可以从螺纹轴移除。
71.图8至图9的动力工具200可以与图10至图11中图示的动力工具接纳件250的特征组合。在一些实施方式中,电动动力工具200可以包括联接至带花键的座206的截头圆锥形内部导引件270。截头圆锥形内部导引件270可以具有第一端部(例如,外部肩部282)处的较大的内直径和第二端部处(例如,紧固件接合特征件266处)的较小的内直径。较大的直径接纳紧固件,并且较大的直径使紧固件穿过截头圆锥形内部导引表面 272定向至较小的直径。在紧固件接合特征件中,紧固件定向在截头圆锥形内部导引件270内。这种截头圆锥形内部导引件270结构可以在紧固件最初接合螺纹轴时有助于定向紧固件。在一些实施方式中,电动动力工具 200可以包括长形构件254,该长形构件254刚性地联接至带花键的座206,以延伸带花键的座206的范围。例如,长形构件254可以在紧固件接合特征件266处具有第二带花键的座206,该第二带花键的座206具有与带花键的座206的外部端部间隔开一距离的外部端部。紧固件接合特征件266 处的延伸的带花键的座206在动力工具200的带花键的座206旋转时旋转。
72.图10和图11图示了根据另一实施方式的动力工具接纳件250。动力工具接纳件250构造成与诸如钻机之类的动力工具252联接并且包括中空长形构件254,该中空长形构件254具有第一端部256和与第一端部256 相反的第二端部258。在一些实施方式中,动力工具接纳件250可以联接至紧固件驱动手动工具、比如手动工具10或手动工具110。在图示的实施方式中,附接结构260(例如,六边形轴、筒形轴、方形轴等)设置在第一端部256处,从而允许动力工具接纳件250附接至旋转式动力工具252 的输出部或旋转式手动工具10或110的输出部。
73.参照图11,紧固件定位组件262在第二端部258处联接至长形构件 254。紧固件定位组件262包括套环264,套环264围绕长形构件254的第二端部258。套环264可以通过紧定螺钉或者通过其他方法比如凸轮锁定件或其他快速连接配件固定至长形构件254。替代性地,套环264可以压配在长形构件254上。套环264包括位于套环264的远端端部处的紧固件接合特征件266(例如,六边形凹部)以及延伸穿过套环264并与中空长形构件254的内部连通的孔268。
74.紧固件定位组件262还包括截头圆锥形内部导引件270,该截头圆锥形内部导引件270联接至套环264并且至少部分地围绕套环264。截头圆锥形内部导引件270包括从紧固件接合特征件266向外延伸的大致截头圆锥形内部导引表面272。图示的截头圆锥形内部导引件270联接成沿着套环264大致线性运动,在一定程度上在向前方向上由保持环274限制并且在向后方向上由套环264上的肩部276限制。套环264由弹簧280向前偏置。在操作中,截头圆锥形内部导引件270的截头圆锥形内部导引表面 272帮助使用者将保持在紧固件接合特
征件266中的紧固件导引到螺纹轴上。
75.替代性地,截头圆锥形内部导引表面272帮助使用者将紧固件接合特征件266导引到螺纹轴上,以用于与已经定位在螺纹轴上的紧固件接合。截头圆锥形内部导引件270可以抵抗弹簧280的力向后移动,从而允许紧固件接合特征件266移动到与截头圆锥形内部导引件270的外部肩部282 平齐的位置,或者在一些实施方式中移动到延伸超过截头圆锥形内部导引件270的外部肩部282的位置。然后可以旋转动力工具接纳件250(例如,通过操作动力工具252或者手动旋转动力工具接纳件250),以沿着螺纹轴驱动紧固件。动力工具接纳件250在使紧固件以向上取向前进时可能是特别有利的。在一些实施方式中,长形构件254可以是一件标准尺寸的管道比如电管道或者可以是一件标准尺寸的管。在一些实施方式中,长形构件254可以与不同长度的其他长形构件互换。
76.图12至图14图示了根据本发明创造的实施方式的快速设置紧固件或螺母300。螺母300包括延伸穿过螺母300并限定螺母300的旋转轴线304 的螺纹孔302。成角度的切开部分或开口306与孔302相交。切开开口306 限定了略大于螺纹轴310的直径的宽度308。因此,螺母300可以旋转至成角度的位置(例如,参见图13),以使切开开口306与螺纹轴310的长度对准;然后,可以螺纹轴310可以通过切开开口306插入螺母300中。紧接着,螺母300旋转成使螺母300的旋转轴线304与螺纹轴310对准(例如,参见图14)。
77.一旦对准,螺母300中的螺纹与螺纹轴310的螺纹接合,并且螺母 300可以类似于螺纹接合在螺纹轴310上的常规螺母那样旋转成使螺母 300沿着螺纹轴310前进。因此,快速设置螺母300可以代替传统螺母使用,并且快速设置螺母300可以在不必使螺母300沿着螺纹轴310的螺纹延伸的情况下安装。相反,快速设置螺母300可以定位在沿着螺纹轴310 的所需位置处,并且然后可选地旋转成螺纹接合轴并进一步使螺母沿着螺纹轴310前进。
78.图15至图18图示了根据本发明创造的另一实施方式的快速设置紧固件或螺母320。螺母320包括螺纹孔322和无螺纹孔或光滑孔326,螺纹孔322沿着第一轴线324延伸穿过螺母320,无螺纹孔或光滑孔326沿着与第一轴线324以角度330相交的第二轴线328延伸穿过螺母320。在图示的实施方式中,角度330在大约5度与大约30度之间。例如,角度330 可以是5
°
、10
°
、15
°
、20
°
、25
°
、30
°
、35
°
、40
°
或45
°
。螺母320还包括形成有多个驱动表面332的外周缘。在图示的实施方式中,螺母320包括六个驱动表面332,使得螺母320具有六边形形状。在其他实施方式中,螺母320可以具有其他形状。
79.图17图示了在螺纹轴334上处于滑动调节位置的螺母320。在滑动调节位置中,无螺纹孔或光滑孔326的第二轴线328与螺纹轴334的纵向轴线336对准。光滑孔326的直径至少略大于螺纹轴334的大直径,使得螺母320可以沿着螺纹轴334的长度滑动而不使螺母320旋转。然后可以将螺母320旋转至图18中图示的螺纹调节位置。在螺纹调节位置中,螺纹孔322的第一轴线324与螺纹轴334的纵向轴线336对准,并且孔322 的螺纹定尺寸成与螺纹轴334螺纹接合。因此,螺母可以通过使螺母320 绕第一轴线324旋转而沿着螺纹轴334前进。
80.参照图12至图18,示出了螺母300、320的两个实施方式。在操作中,螺母300或螺母320可以包括沿着螺母300或320的周缘的驱动表面 332。驱动表面332构造成接纳工具,以使螺母300或320沿着螺母300 或320的第一轴线绕螺纹轴310或334旋转。螺母300或320包括螺纹孔 322,螺纹孔322沿着螺母300或320的第一轴线324延伸穿过螺母300 或320。螺纹孔322构造成联接至螺纹轴,该螺纹轴沿着螺母300或320 的第一轴线324穿过螺纹孔322。
光滑孔326沿着螺母300或320的第二轴线328延伸穿过螺母300或320,该第二轴线328与螺母300或320的第一轴线324以锐角相交。光滑孔326具有下述直径,该直径构造成接纳螺纹轴的外直径并使螺纹轴能够自由地滑动穿过光滑孔326。
81.在一些实施方式中,螺母300或320包括沿着周缘并且在第二轴线 328的方向上穿过一个或更多个驱动表面332的开口306。开口306构造成接纳螺纹轴,该螺纹轴通过开口306侧向地插入螺母300或320中。然后,螺纹轴可以沿着螺母300或320的第二轴线328滑动。当螺母300或 320被定位时,螺母300或320相对于第一轴线324旋转,以沿着螺纹孔 302或322与螺纹轴螺纹接合。开口306可以相对于螺纹孔302或322以一角度延伸,并且开口306可以平行于光滑孔326的角度330。开口306 可以延伸跨过螺母300或320的两个或更多个相邻的驱动表面332。
82.螺母300或320以及螺纹孔302或322可以具有美国国家标准协会 (ansi)的公称直径尺寸和螺距紧固件尺寸。例如,1/4
”×
20unc,其中每英寸20个螺纹。螺母300或320以及螺纹孔302或322可以具有公制的公称直径和螺距紧固件尺寸。例如,m8
‑
1.0
×
20,其中,m表示公制尺寸,8等于以毫米为单位的公称直径,1.0等于以毫米为单位的螺距,并且20表示以毫米为单位的长度。螺母300或320可以具有保护涂层,例如为锌/铝涂层、含氟聚合物涂层、二硫化钼涂层、热固化的环氧树脂涂层、无机锌涂层、苯酚涂层、磷酸盐涂层和/或其他保护涂层。
83.图19图示了根据本发明创造的另一实施方式的紧固件驱动工具400。紧固件驱动工具400包括手柄402、布置在手柄402的第一端部处的第一驱动构件404以及布置在手柄402的与第一端部相反的第二端部处的第二驱动构件406。在图示的实施方式中,驱动构件404、406中的每一者是座并且可以构造成接纳相同或不同公称尺寸的紧固件。驱动构件404、406 中的每一者包括相应的槽408和410,所述相应的槽408和410延伸到驱动构件404和406的内部中。第一槽408限定第一宽度412,该第一宽度412至少略大于螺纹轴的大直径但小于可以由驱动构件404沿着螺纹轴驱动的紧固件的大直径。类似地,第二槽410限定第二宽度414,该第二宽度414至少略大于螺纹轴的大直径但小于可以由驱动构件406沿着螺纹轴驱动的紧固件的大直径。因此,槽408和410允许驱动构件404和406滑动到螺纹轴上而不必使紧固件驱动工具400越过螺纹轴的端部。
84.图示的紧固件驱动工具400还包括两个模具416和418,所述模具416 和418可以用于清理轴上的损坏的螺纹或者将螺纹切割成无螺纹的轴。两个模具针对与驱动构件的尺寸相对应的杆上的螺纹而定尺寸。例如,第一模具416定尺寸成切割可以与可以由第一驱动构件404驱动的紧固件的螺纹配合的螺纹,并且第二模具418定尺寸成切割可以与可以由第二驱动构件406驱动的紧固件的螺纹配合的螺纹。在图示的实施方式中,紧固件驱动工具400还包括位于手柄402的中央且位于驱动构件404、406之间的孔口420,该孔口420可以特别适于附接至系索。
85.图20至图21图示了根据本发明创造的另一实施方式的测量和对准工具500。工具500包括水准仪502(例如,鱼雷式水准仪)和联接至水准仪502的激光距离测量单元504。
86.参照图21,在图示的实施方式中,测量单元504经由转动组件506 以可枢转的方式联接至水准仪502。转动组件506包括第一夹持构件508、第二夹持构件510和固定在第一夹持构件508中的凹部514内的轴承512。测量单元504包括由轴承512支承的枢转轴516。转动
组件506延伸穿过水准仪502中的孔518,并且夹持构件508、510通过夹持水准仪502的内部环形壁520而将转动组件506固定在孔518中。
87.在操作中,工具500可以用作典型的水准仪,以确保物体(例如,螺纹轴、unistrut框架、线架等)是水平的或者以其他方式正确地定向。工具500可以同时测量从地面至水准仪502的距离(例如,相对于水准仪的基部表面校准)以及要测量的物体相对于地面的角度。因为测量单元504 经由转动组件506以可枢转的方式联接至水准仪502,所以测量单元504 在重力的影响下直接指向下方。轴承512有利地允许测量单元504相对于水准仪502的相对无摩擦的旋转。
88.应当理解的是,附图详细图示了示例性实施方式,并且应当理解的是,本技术不限于在描述中阐述或在附图中图示的细节或方法。还应当理解的是,术语仅出于描述的目的而不应当被认为是限制性的。
89.基于该描述,本发明创造的各方面的其他改型和替代性实施方式对于本领域技术人员而言将是明显的。因此,该描述应被解释为仅是说明性的。在各种示例性实施方式中示出的构造和布置仅是说明性的。尽管在本公开中仅详细描述了几个实施方式,但是在本质上不脱离本文中所描述的主题的新颖教示和优点的情况下,许多改型是可能的(例如,各种元件的大小、尺寸、结构、形状和比例、参数值、安装布置、材料的使用、颜色、取向等方面的变型)。示出为一体形成的一些元件可以由多个部分或元件构成,元件的位置可以颠倒或以其他方式变化,并且分立的元件或位置的性质或数目可以改变或变化。任何过程、逻辑算法或方法步骤的顺序或次序可以根据替代性实施方式而变化或重新排序。在不脱离本发明创造的范围的情况下,在各种示例性实施方式的设计、操作条件和布置方面还可以进行其他替换、改型、改变和省略。
90.出于本公开的目的,术语“联接”是指两个部件直接或间接地彼此接合。这样的接合本质上可以是固定的或者本质上是可移动的。这样的接合可以通过两个构件以及任何另外的中间构件彼此一体地形成为单个整体本体、或者通过两个构件彼此附接或两个构件与任何另外的构件彼此附接来实现。这样的接合本质上可以是永久的,或者替代性地这样的接合本质上可以是可移除的或可释放的。
91.尽管本技术叙述了在此所描述的各方面的特征的特定组合,但是本发明创造的各种实施方式涉及本文描述的特征中的任何特征的任何组合,而无论当前是否要求保护这种组合,并且特征的任何这样组合可以在本技术或在未来的申请中要求保护。以上描述的任何示例性实施方式的任何特征、元件或部件可以单独使用或与以上描述的任何其他实施方式的任何特征、元件或部件组合使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
